жение мо.жет быть получено на дополнительном валу, несоосном ведущему, что увеличивает габариты механизма. Скорость прямого и обратного вращения обусловлены характером кривой паза и не может быть изменена без замены ведущей деталн - диска с пазом. Действие рычага с грузом ограничено только зоной расширенного участка наза.
Целью изобретения является уменьшение габаритов механизма.
Это достигается тем, что в механизме для гфеобразования вращательного движения в возвратно-вращательное, содержащем корпус, расположенные в нем ведущее звено, ведомое звено и кинематически связывающее их нромежуточное звено, включающее рычаг с грузом, ведущее звено выполнено в виде обоймы, ведомое звено - в виде расположенного соосно обойме вала с жестко установленной на нем звездочкой с. заклинивающими и упорными поверхностями, промежуточное звено - в виде расположенной соосно ведомому звену ступицы с выступами па ее торце, мехапизм снабжен жестко связанным со стуницей и имеющим груз дополнительным рычагом и роликами, каждый из которых размещен между внутренней новерхностью обоймы и соответствующим заклинивающей и унорной новерхностями и взаимодействует с соответствующим выступом ступицы, а корпус снабжен унорами, расположепными в плоскости вращения рычага стуницы и взаимодействующими с ним при его прямом и обратном ходе, и упором, расноложенным в плоскости вращения рычага звездочки и взаимодействующим с ним.
Кроме того, упор, взаимодействующий с рычагом звездочки, подпружинен в направлёПин этого рычага.
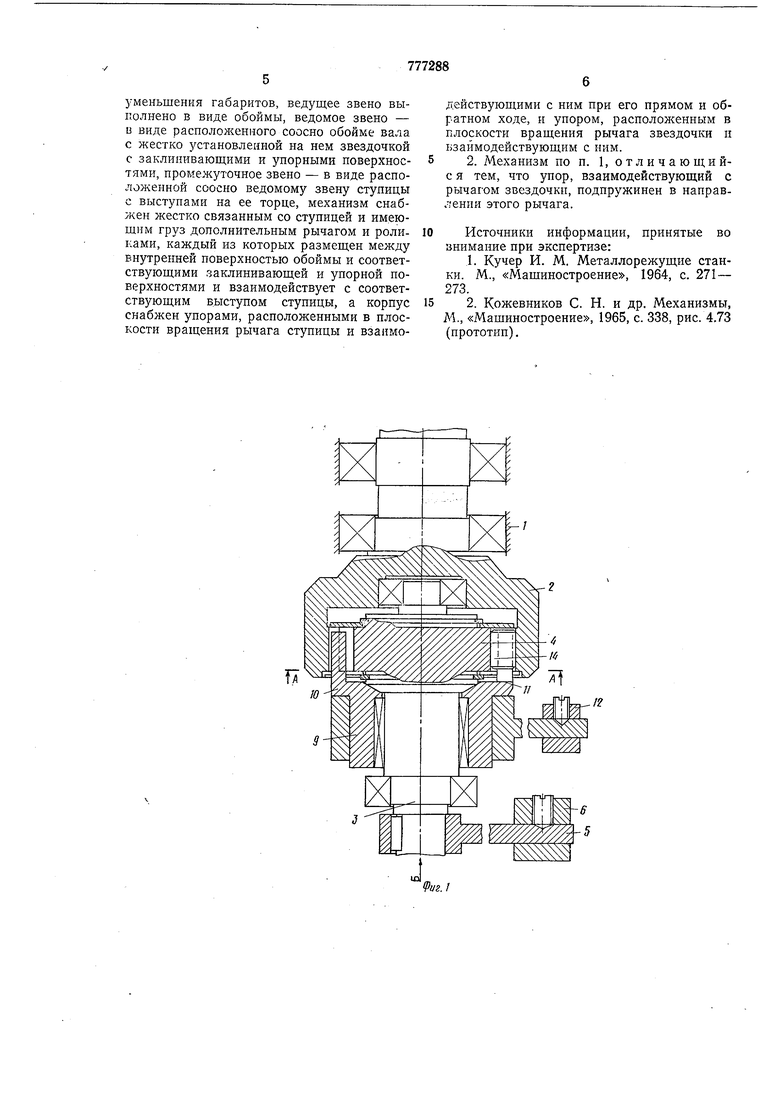
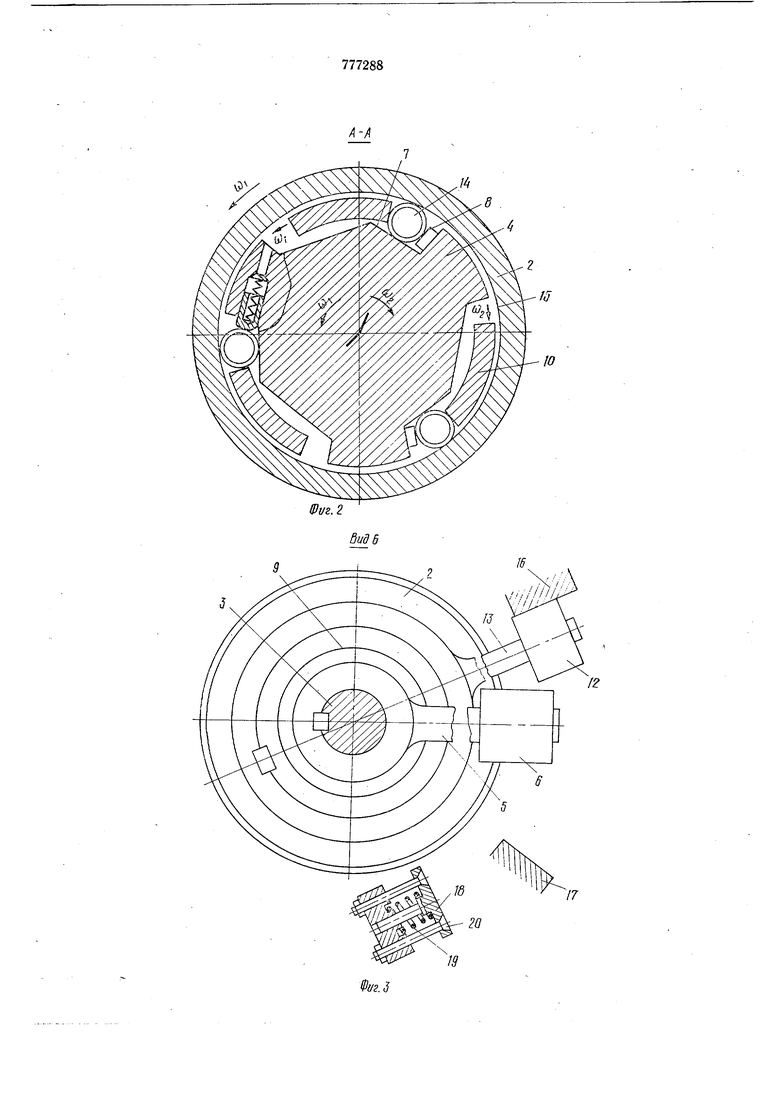
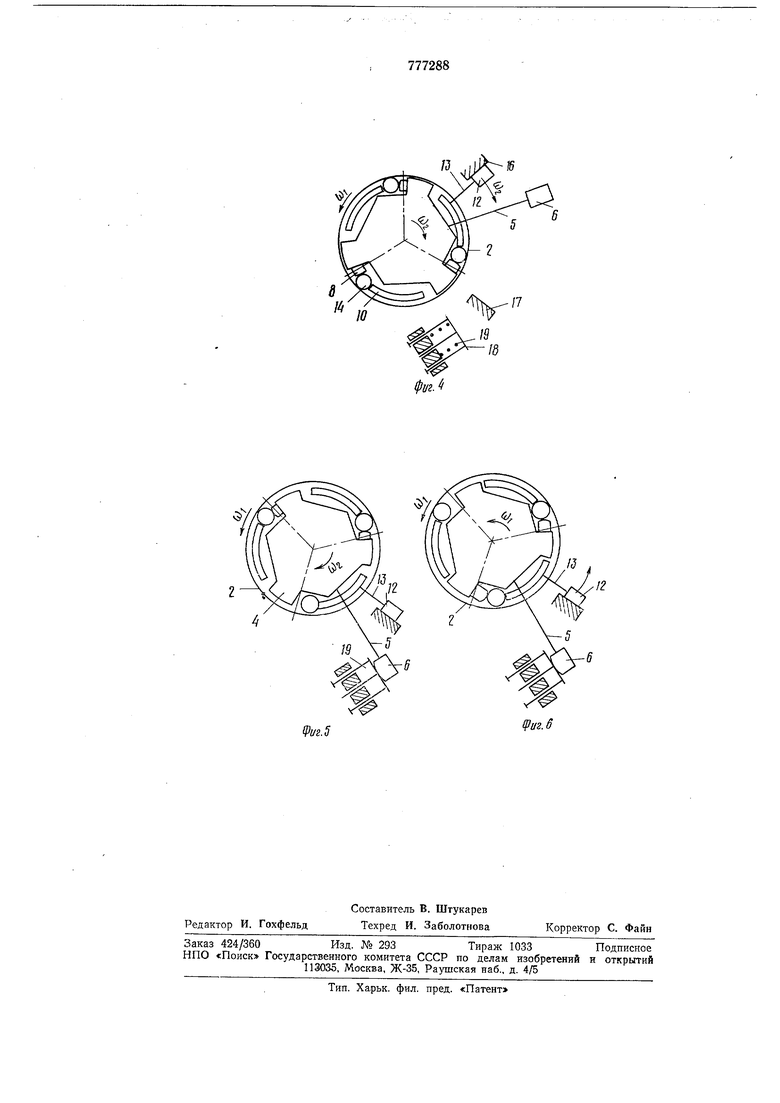
На фиг. 1 представлен общий вид механизма в разрезе; па фиг. 2 - сечение А-А фиг. 1; на фиг. 3 - внд Б фиг. 1; на фиг. 4 - механизм в конце прямого хода велТ,омого звена в момент выключения механизма; на фиг. 5 - то же, в конце обратного хода ведомого звена; на фиг. б - то же, в момент включения механизма на прямой ход ведомого звена.
Механизм содержит корпус 1, расположенные в нем ведущее звено в виде обоймы 2, ведомое звено в виде расположенного соосно обойме 2 вала 5 с жестко установленной на нем звездочкой 4, имеющей жестко связанный с ней рычаг 5 с грузом 6, заклнниваюп;|;ие и у-порные поверхности 7 и 8, промежуточное звено,кйнематически связывающее ведущее иведомое звенья, в виде расположенной соосно ведомому звену ступицы 9 с выступами 10 на ее торце //. Механизм снабжен жестко связанным со ступицей 9 и имеющим груз J2 дополнительным рычагом 13 и роликами 14, каждый из которых размещен между внутренней
поверхностью 15 обоймы 2 и соответствующими заклинивающей и упорной поверхностями 7 и 6 взаимодействует с соответствующими выступами 10 стуницы 9. Корпус 1
снабжен унорами 16 н 17, расположенными в плоскости вращения рычага 13 ступицы 9 и взанмолсйствующими с ним при его прямом и обратном ходе, и упором 18, расположенным в плоскости вращения рычага 5
звездочки 4 н взаимодействующим с ним. Унор 18, взаимодействующий с рычагом 5 звездочки 4, подпружинен с номощью упругого элемента в виде нружины 19 в направлении рычага 5. Упор 18 снабжен регулировочными болтами 20.
Механизм работает следующим образом. Обойма 2 вращается от нрнвода (не показан) со скоростью 0)1 (см. фиг. 2).. При заклиненных роликах 14 звездочка 4 с валом 5 н рычагом 5 вращается с той же скоростью 0)1, преодолевая момент от груза 6. Заклиненные ролики 14 толкают выступы JO ступицы 9, преодолевая сопротивление момента от груза 12 на рычаге 13. Достнгьув упора 16 (см. фиг. 4), рычаг 13 останавливается, расклинивая ролики 14, рычаг 5 под действием груза 6 вращает вал 3 в обратном нанравлении со скоростью cog. При этом момент груза 12 поддерживает ролнки 14 в расклиненном состоянии в продолжение всего обратного хода. Достигнув при обратном вращении упора 17, рычаг 13 останавливается (см. фиг. 5), а вал 5 с рычагом 5 продолжает обратное вращение в
пределах угла проскальзывапия звездочки 4 относительно обоймы 2, что снособствует заклиниванию роликов 14 и прямого враи.1,ения вала 3 (фиг. 6). Для снижения инерционных нагрузок при включении прямого вращения вала 3 упор 18 установлен в таком положении, что рычаг 5 предварительно сжимает пружину 19 до остановки рычага 13 в нижнем ноложении, а регулировочными болтами 20 упор 18 установлен
в таком ноложении, что момент заклинивання роликов 14 совпадает с началом разжатия нружины 19, ноэтому пружина 19 толкает рычаг 5 в нанравлеиии нрямого вращения.
Конструкция механизма компактна и проста в изготовлении, установка величины прямого и обратного хода в пределах до 180° меняется перестановкой упоров 16, 17, 18 без замены деталей, и регулируется с
большой точностью нрн износе деталей.
Формула изобретения
1. Механизм для преобразования вращательпого движения в возвратно-вращательное содержащий корпус, расположенные в нем ведущее звено, ведомое звено н кинематически связывающее пх промежуточное звено, включающее рычаг с грузом, отличающееся тем, что, с целью
уменьшения габаритов, ведущее звено выполнено в виде обоймы, ведомое звено - в виде расположенного соосно обойме вала с жестко установленной на нем звездочкой с заклпнпвающими и упорными поверхностямп, промежуточное звено - в виде расположенной соосно ведомому звену ступицы с выступами на ее торце, механизм снабжен жестко связанным со ступицей и имеющим груз дополнительным рычагом и роликами, каждый из которых размещен между внутренней поверхностью обоймы и соответствующими заклинивающей и упорной поверхностями и взаимодействует с соответствующим выступом ступицы, а корпус снабжен упорами, расположенными в плоскости вращения рычага ступицы и взанмодействующими с ним при его прямом и обратном ходе, и упором, расположенным в плоскости вращения рычага звездочки ц взаимодействующим с ним.
2. Механизм по п. 1, о т л и ч а ю щи йс я тем, что упор, взаимодействующий с рычагом звездочки, подпружинен в направлении этого рычага.
Источники информации, принятые во внимание при экспертизе:
1.Кучер И. М. Металлорежущие станки. М., «Мащиностроение, 1964, с. 271 - 273.
2.Кожевников С. Н. и др. Механизмы, М., «Машиностроение, 1965, с. 338, рис. 4.73 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| МУФТА ОДНООБОРОТНАЯасесоюзнАЯ ИДТея | 1972 |
|
SU323585A1 |
| Устройство для переключения ремизоподъемной каретки ткацкого станка на обратный ход | 1986 |
|
SU1461781A1 |
| Муфта свободного хода | 1985 |
|
SU1317200A1 |
| МЕХАНИЗМ СВОБОДНОГО ХОДА | 1972 |
|
SU347482A1 |
| Коробка передач | 1983 |
|
SU1191656A1 |
| Инерционный трансформатор вращающего момента | 1990 |
|
SU1820105A1 |
| Вариатор Н.П.Ефимова | 1981 |
|
SU1199674A1 |
| МУФТА ОБГОНА | 1969 |
|
SU253499A1 |
| Устройство для подачи материала к обрабатывающей машине | 1983 |
|
SU1091976A1 |
| ПРИВОД ВЫКЛЮЧАТЕЛЯ | 1970 |
|
SU273314A1 |
$vz.2
/4
Фиг. 5
Ipuz.S
