чены соответственно к выходам первого и второго датчиков скорости, а выходы через первый и второй сглаживающие делители соответственно подключены к двум разным входам регулятора, второй вход первого сумматора подключен к входу преобразователя частоты, а второй вход другого сумматора подключен к выходу преобразователя, вход которого связан с выходом задающего генератора.
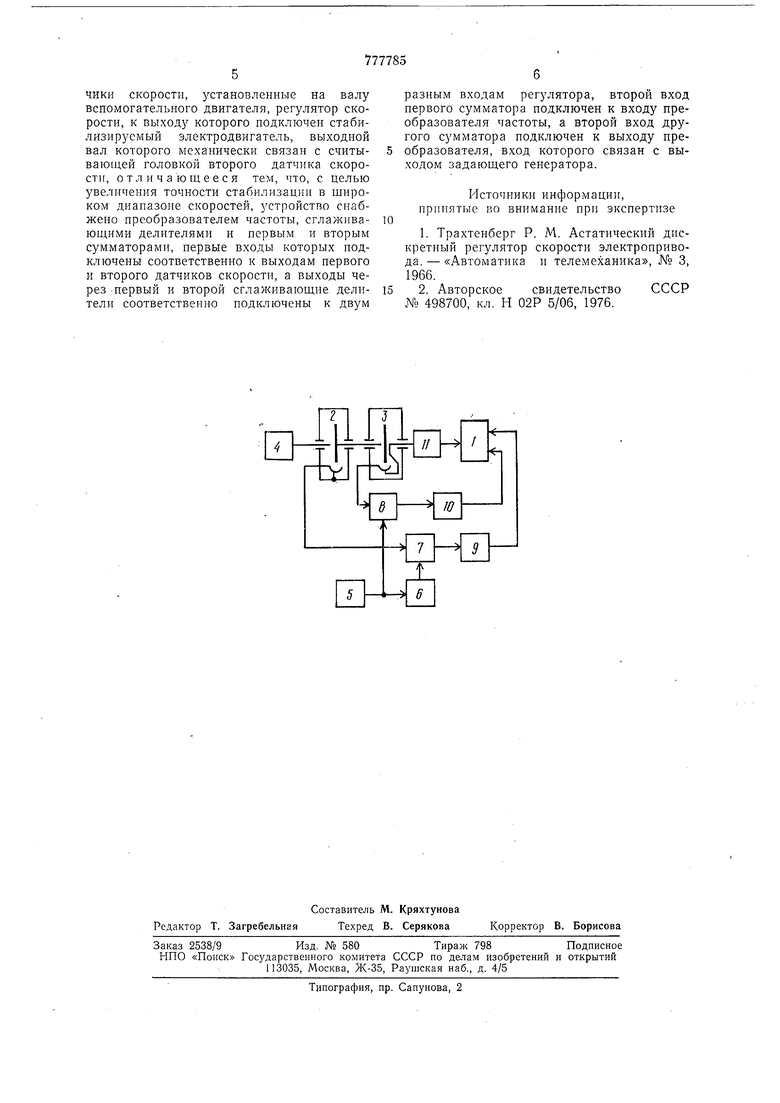
На чертеже представлена блок-схема устройства для стабилизации скорости враи1ения электродвигателя.
Устройство для стабилизации скорости электродвигателя содержит регулятор 1, датчики 2 и 3 скорости, установленные на валу вспомогательного двигателя 4, задающий генератор 5, преобразователь 6 частоты, сумматоры 7 и 8, сглаживающие делители 9 и 10 и основной двигатель 11.
Устройство работает следующим образом: рассмотрим случай задания нулевого уровня скорости основного двигателя 11. При этом коэффициент /Се преобразователя 6 устанавливается равным , на сумматоры 7 и 8 в этом случае будут поступать равные частоты, соответствующие по величине частоте fs с выхода задающего генератора 5. Ввиду того, что датчики 2 и 3 имеют одинаковое число меток, с их выходов на сумматоры 7 и 8 будут поступать равные частоты /2 и -/з, которые после сложения с частотой /5 и деления в (/(9 /Сю) раз сглаживающими делителями 9 и 10, также равными по величине, будут поступать на входы регулятора 1. Равенство входных частот регулятора 1, в соответствии с логикой работы устройства, определяет нулевую скорость основного двигателя II, вследствие чего в системе устанавливается установивщееся равновесие.
При необходимости задания определенного уровня скорости двигателя 11 коэффициент преобразователя 6 устанавливается отличным от единицы и соответствует выбранному уровню скорости. В этом случае на сумматоры 7 и 8 будут поступать неравные по величине частоты /5 и . В результате сложения их попарно с равными по величине частотами 2 и fa на входы регулятора 1 будут поступать неравные частоты /9 и fio с выходом сглаживающих делителей 9 и 10. Это вызовет вращение двигателя 11 со скоростью, при которой восстановится равенство частот на входе регулятора 1, т. е. устанавливается новое равновесие в системе. Уровень выходной скорости двигателя 11 в этом случае будет определяться только разностью частот fs и /е и не зависеть от характера вращения вала вспомогательного двигателя 4. Справедливость этого утверждения легко доказывается. Исходя из условия равенства частот на входах регулятора 1 в установивщемся режиме работа с учетом того, что частоты с
выходов датчиков 2 и 3 определяются соотнощеииями:
jrZi
- (1)
(в + «о),
(2) 2п
где /2 и /3 - частоты с выходов датчиков 2 и 3;
и Zs -число меток датчиков 2иЗ; Wb и - скорости вспомогательного и основного двигателей соответственно.
Для схемы, приведенной на фиг. 1, справедливо соотношение:
9(Л + Л/Г.)-А,о(Л + Л) (3)
с учетом соотношений (1) и (2), а также равенства (9 10) выражение (3) можно записать в виде:
«,, + /,/С. + (0,)+/„ (4)
2я
2а
(/C.-l).
(5)
откуда «о
Формула (5) доказывает независимость скорости основного двигателя И от уровня и пульсаций скорости вспомогательного двигателя 4. Уменьшение или увеличение скорости CU6 двигателя 4 приводит к одновременному и равному цо величине изменению уровней частот на входе регулятора 1, разность же частот /2 и /з, соответствующая заданному уровню скорости двигателя И, остается неизменной и равной разности частот /5 и fe, задаваемой преобразователем 6. Вследствие этого в предложенном устройстве по сравнению с известным 2 исчезает необходимость в стабилизации скорости вспомогательного двигателя 4. Испытание привода, практически реализующего данное устройство, доказало его работоспособность и показало, что в данном устройстве может быть достигнут диапазон D 10000:1 при высокой равномерности вращения и точности поддержания заданного уровня на нижней скорости не хуже 0,1%, на высокой скорости 0,01%.
Таким образом, исключение системы стабилизации скорости вспомогательного двигателя 4 и введение новых элементов - преобразователя, сумматоров и сглаживающих делителей с соответствующими связями позволяет получить положительный технический эффект, а именно увеличить точность поддержания заданного уровня скорости в широком диапазоне их изменения.
Формула изобретения
Устройство для стабилизации скорости, вращения электродвигателя, содержащее задающий генератор, первый и второй датчики скорости, з становленные на валу вспомогательного двигателя, регулятор скорости, к выходу которого подключен стабилизируемый электродвигатель, выходной вал которого механически связан с считывающей головкой второго датчика скорости, отличающееся тем, что, с целью увеличения точности стабилизации в щироком дианазоие скоростей, устройство снабжено преобразователем частоты, сглаживающими делителями и первым и вторым сумматорами, первые входы которых подключены соответственно к выходам первого и второго датчиков скорости, а выходы через первый и второй сглаживающие делители соответственно подключены к двум
разным входам регулятора, второй вход первого сумматора подключен к входу преобразователя частоты, а второй вход другого сумматора подключен к выходу преобразователя, вход которого связан с выходом задающего генератора.
Источники информации, принятые во внимание при экспертизе
1.Трахтенберг Р. М. Астатический дискретиый регулятор скорости электропривода.- «Автоматика и телемеханика, № 3, 1966.
2.Авторское свидетельство СССР № 498700, кл. Н 02Р 5/06, 1976.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Электропривод | 1986 |
|
SU1372580A1 |
| Регулятор линейной плотности ленты | 1981 |
|
SU981471A1 |
| Частотно-управляемый асинхронный электропривод | 1980 |
|
SU951620A1 |
| Асинхронный вентильный каскад | 1991 |
|
SU1836801A3 |
| Электропривод постоянного тока | 1991 |
|
SU1786630A1 |
| Способ регулирования частоты напряжения валогенераторной установки | 1982 |
|
SU1167108A1 |
| Устройство для управления электроприводом постоянного тока | 1977 |
|
SU748753A1 |
| Силовая установка | 1975 |
|
SU681204A1 |
| Статический преобразователь частоты для синхронной машины | 1978 |
|
SU788319A2 |
