1
Изобретение относится к текстильной промышленности, конкретно к устройств вам для регулирования линейной плотности (развеса) на ленточных и чесальных машинах.
Известен регулятор линейной плотности ленты, содержащий датчик неро&ноты ленты, датчики частоты вращения приемной и выпускной пар вытяжного прибора, силовой преобразователь, подключенный к электродвигателю, вал которого кинематически связан с вьшускной парой вытяжного прибора, и блок управления lТ
Недостаток известного устройства невысокая точность регулирования, обусловленная малым быстродействием и нестабильностью характеристик аналоговых элементов, используемых в регуляторе.
Цель изобретения - повышение точности регулирования.
Поставленная цель достигается тем, что в регуляторе, содержащем датчик.
неровноты ленты, датчики частоты
вращения приемный и выпускной пар вытяжного прибора. Силовой преобразо- v ватель, подключенный к электродвигателю, вал которого кинематически связан с вьшускной парой вытяжного при бора, и блок управления, блок управления состоит из последовательно соединенных задающего генератора и делителя частоты, регулируемого делителя частоты,
10 последовательно включенных вычитателя,. и делителя сумматора и компаратора, а датчики частоты вращения приемной и вьшускной пар вытяжного прибора вьшолнены в виде сельсинов, входы которых связаны с
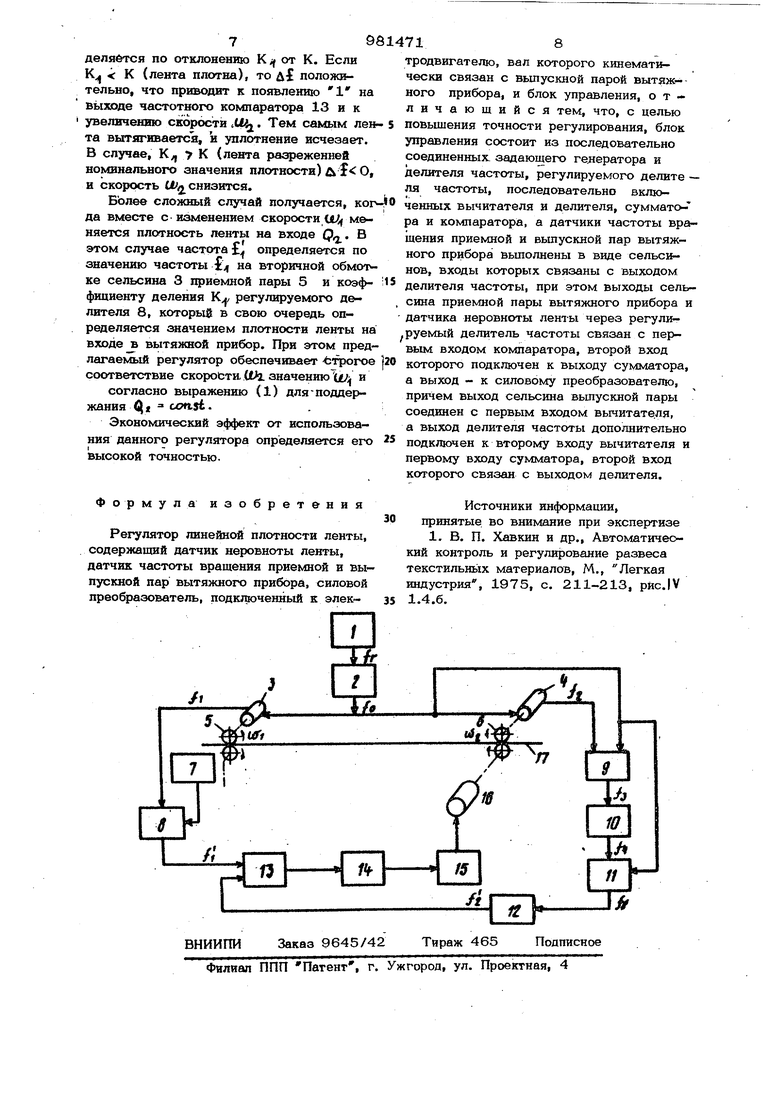
15 выходом делителя частоты, при этом ъыходы сельсина приемной пары вытяжного прибора и датчика неровноты ленты через регулируемый делитель частоты связаны с первым входом компара20тора, второй вход которого подключен к выходу сумматора, а выход - к силовому преобразователю, причем выход сельсина вьшускной пары соединен с первым входом вычитателя, а выход делителя частоты дополнительно подключен к второму входу вычитателя и первому входу сумматора, второй вход которого связан с выходом делителя На чертеже представлена блок-схема регулятора. Рег улятор линейной плотности ленты состоит из высокостабильного (например кварцевого) задающего генератора 1, выход которого через делитель 2 частоты соединен с входом (первичными обмотками) сельсинов 3 и 4 приемной 5 и выпускной 6 пар. Роторы сельсинов 3; и 4 жестко соединены с приемным 5 и вьшускным 6 цилиндрами вытяжного прибора, Вращение приемному цилиндру 5 передается механически от технологической машины, (на чертеже не показана) . Датчик 7 неровноты ленты установ лен на входе вытяжного прибора (разомкнутая система регулирования). Выход (вторичная обмотка) сельсина 3приемной пары подключена ко входу ре гулируемого делителя 8 частоты, к уп- равляюшему входу которого подклЬчен датчик 7 неровноты ленты. Выход (вторичная )ткa) сельсина 4вьшускной пары соединена с первым входом вычитателя 9, на второй вход ко- торого поступает сигнал с делителя 2 частоты. Выход вычитателя 9 через делитель 1О соединен с первым входом сумматора 11. Ко второму входу сумматора подключен выход делителя 2 частоты. Выход сумматора 11 через делитель 12 подключен к первому входу компаратора 13, на второй вход которого подключен выход регулируекюго делителя 8. Выход компаратора 13 через корректиру ющее устройство 14 и силовой преобразователь 15 соединен с электродвигателем 16, приводящим во вращение выпускные цилиндры 6 ш 1тяжного прибора. Цифрой 17 обозначена вытягиваемая лен та. Устройство работает следующим образом. При построении регуляторов линейной плотности текстильной ленты с использованием регулируемого электропривода в качестве регулятора скорости вьтускных цилиндров 6, возникает проблема согласования скоростей приемной 5 и вьшускной 6 пар в переходных режимов пуска, торможения, сброса и наброса нагрузки технологической ма1щины, поскольку скорость приемной пары 5 в этом случае определяется скоростью вр ения двигателей механизма. Вместе с ем, построение разомкнутых регуляторов требует жесткого соблюдения соот ошения,. гг ш где (J - плотность ленты на входе выТяжного прибора; О,. - плотность ленты на выходе вытяжного прибора; ии - скорость приемной пары; f)a скорость выпускной пары, Из уравнения (1) видно, что для стабилиаации Q требуется изменить UU, как с изменением 0 , так и с изменением Ц;.. При этом точность стабилизации плотности ленты на выходе не измер5Ьется. Рассмотрим работу устройства для двух возможных случаев. 1. Допустим, линейная плотность ленты 17 на входе ( Q,f) равна номинальной. В этом случае соотношение скоростей Ц). и Шо.должно быть таким ., , (i; где Е - номинальная вытяжка ва вытяз ном приборе без регулирования ллотности. Следовательно, требуется поддерживать строгое соответствие скоростей W и U. При питании первичной обмотки сельсин на синусоидальным напряжением с частотой if} п& вторичной обмотке его появляется напряжение с частотой -V|. (ъ где Ш- скорос -ь вращения ротора сельсина;р - число его пар полюсов; 3,14. Следовательно, частота на выходе (на вторичной обмотке) однозначно связана со скоростью вращения, при стабильной Точность сельсина состав«частотеляет несколько угловых минут и значительно больще точности аналоговых ; датчиков скорости (тахогенераторов). В рассматриваемом случае система должна обеспечить соблюдение соотнощ&ния (2). При этом частота генератора 1 ( I- ) поступает на делитель 2 частоты, где доводится до требуемой частоты ( f О ). Поступая на первичные обмотки сельсинов 3 н 4, эта частота прео&и лр - разуется в частоту-f fj - jp на вторичной обмотке сельсина 3 приёмной - г г- (JthP. пары и в частоту-jl t -;-. на вторичной обмотке сельсина 4 вьшускной пары. Поступая на вычитатель 9, частота преобразуется в частоту , причем . На делителе Ю с коэффициентом деления Е, равным значению номинальной вытяжки (формула 2), чаотога ia преобразуется в частоту На выходе сумматора li полу Ч t ,Ck, чается частота g , равная - f Е о Делитель 12 доводит ее до значений fo)/. где K COVJ6t. Частота /j. поступает на частотный компаратор 13, на первый вход которогб : через регулируемый делитель 8 от селъ сина 3 приемной пары поступает частота , причем поскольку для первого случа Qi QhOM- - коэффициент деления регулируемого делителя 8 равен коэффици,внту деления делителя 12, f, , /К Следовательно, на вход частотного компаратора 13 поступают два сигнала , и t. Работа компаратора заключается в следующем. Он определяет знак разнос , ти - и в случае положительного ее знака вырабатывает на своем выходе сигнал единичного уровня, а в случае отрицательного - нулевого. Обозначим разность за раскроем ее: - - ° - 1о .Jo.«. Р 1 t.ta .. Ек К -1Г -21Гк/4 Р .io.ic.. Efe К ItcK Следовательно, сигнал на выходе компаратора 13 появится тогда, когда сксфость (jWj будет меньше EtWf - В этом случае требуется разогнать выпускные цилшцфы 6 до большей скорости. Сигнал проходя через корректирующее уст ройство 14, включает силовой преобразователь 15, и он подает напряжение На электродвигатель 16. Это приводит к уве личению скорости тех пор, пока разность BU J-U/J не сменит знак. Тогда на выходе компаратора 13 появится нулевой сигнал и через корректирующее устройство и преобразователь 15 отклк чит двигатель 16 от сети. Скорость Ч; упадет. Тем самым достигается стабилизация соотношения скоростей, Ш в переходных режимах. Это хорошо вцд9716 но для с луч аев изменения скорости Если происходит пуск технологической машины (например, чесальной), скорость Ш( меняется по экспоненциальному закону с большой постоянной времени, o6ycii ловленной болыиими инерционными мао сами главного барабана. При появлении на вторичной обмотке сельсина 3 напряжения с частотой . на первом вхоДе компаратора 13 через регулируемый делитель 8 появляется напряжение с чаототой . Поскольку электродвигатель 16 до сих пор стоял, то вторичной обмотке сельсина 4 выпускной п&ды. равна О и на выходе компаратсфа 13 имеет сигнал единица. Преобразователь 15 подключает двкгатет 16 на nojraoe напряжение сета, и скорость Lf BO jaoтает до тех пор, пока ае достигнется равенство ( 14/ . Это происходшт тем быстрее, чем больше в динамических моментах двигателя главного привода машины и электродвигателя 15. Работа устройства при случайном иэ ненни скорости OJ и при торможении технологической машины происходит ана объяснения не требует. Релейный характер работы компарато обеспечивает максимальное быст родействие регулятора. Корректирующее ство 14 обеспечивает качественное „ротекание переходных процессов. Цш ровая обработка сигналов увеличивает точность регулирования. 2. Теперь рассмотрим случай, когда меняется плотность ленты на входе Q (выражение 1). При этом коэффициент деления управляемого делителя 8, опр&деляемь1й напряжением, .снимаемым с датчика неровноты ленты, отличается от коэффициента деления делителя 12. При положительном отклонении Q от (ЗнОМ (лента плотнее) делитель 8 дает коэффвциент Деления кгоньше К, а при менее плотной ленте Q Рц - коэффициент дв ления увеличивается по сравнению с К. Допустим, . Тогда выражение (4) преобразуется к виду . г « -{ - -:- + . 1 2 К К-н 21СМ х о (.Р - р d JL ЕК SJcEK- ЕК I fc (-fc-)fa-)(o) тое К - коэффициент деления регулируемого делителя 8 в случае цо Поскольку второй сомножитель выражения (5) постоянен, то знак й опре

| название | год | авторы | номер документа |
|---|---|---|---|
| Система регулирования линейной плотности ленты | 1981 |
|
SU1033597A1 |
| Система регулирования линейной плотности ленты | 1982 |
|
SU1017746A1 |
| Устройство для регулирования линейной плотности волокнистого продукта | 1990 |
|
SU1791480A1 |
| Устройство для регулирования линейной плотности волокнистого продукта | 1988 |
|
SU1618793A1 |
| Устройство для регулирования линейной плотности волокнистого продукта | 1987 |
|
SU1513046A1 |
| Устройство автоматического регулирования линейной плотности волокнистого материала | 1990 |
|
SU1770470A1 |
| РЕГУЛЯТОР ЛИНЕЙНОЙ ПЛОТНОСТИ ЛЕНТЫ НА ТЕКСТИЛЬНОЙ МАШИНЕ | 2011 |
|
RU2471899C1 |
| Устройство автоматического регулирования линейной плотности ленты | 1981 |
|
SU971939A1 |
| Устройство для управления крутильно-мотальным механизмом ровничной машины | 1979 |
|
SU781229A1 |
| Адаптивная система автоматического регулирования линейной плотности чесальной ленты | 1986 |
|
SU1397566A1 |
