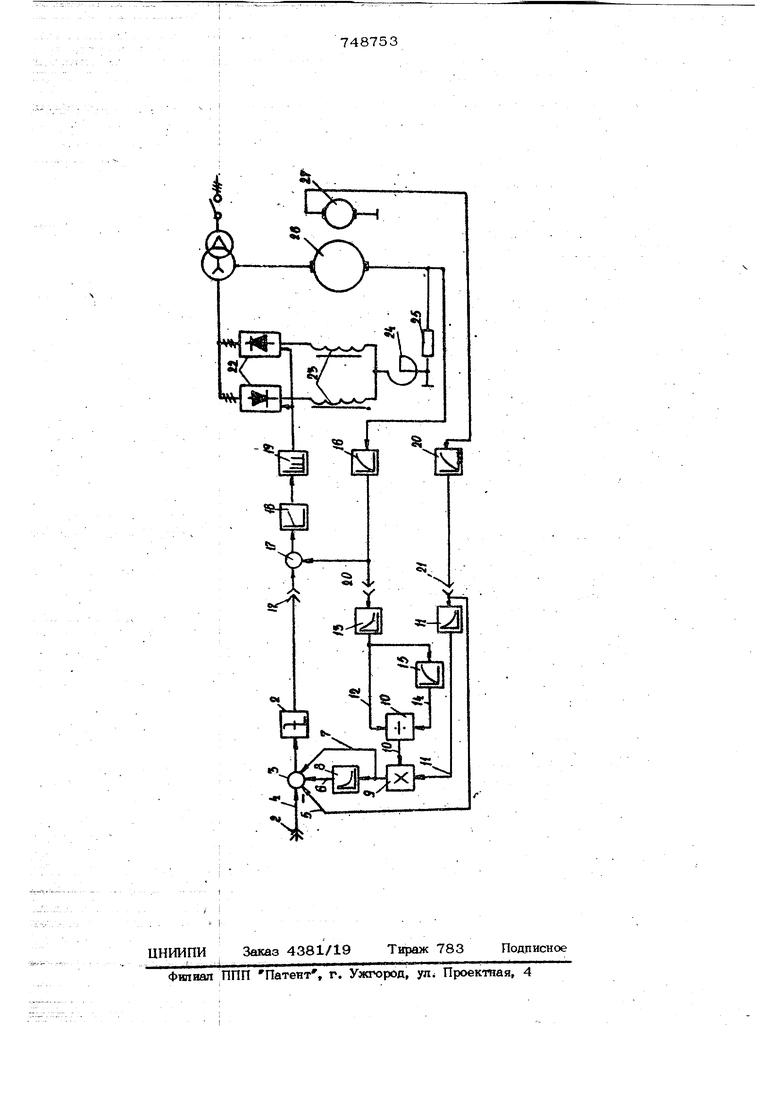
Изобретение относится к .электротехнике и может быть использовано в систе мах электропривода постоянного тока, , характеризующихся высокими требованиями к стабильности динамических свойств при существенно нестационарных параметрах объекта управления и исполнительного устройства, в частности тиристорного преобразователя. Известны устройства для управления нестационарными электроприводами постоянного тока Ш и 2. В одном из этих источников описано устройство для управления электроприво дом постоянного тока, содержащее схему контроля (датчики) для определения реакции системы на известные входные воздействия. Выходные сигналы датчиков подаются на решающее устройство, ко- , торое вырабатывает сигналы для изменения режима работы системы управлв- ния эпектропривоаом. В устройстве (2) опорную величину тока-якоря электродвигателя получают путем сложения основного и дополнительного сигналов, второй из которых получают в нелинейном блоке, включенном на выходе линейного. Недостатком этих устройств является предположение об известности входных (возмущающих) воздействий, в то время как большей частью в современных Системах электропривода внешние возму- . щения являются неизмеримыми, а также сложность их выполнения. Из известных устройств наиболее близким к предложенному является устройство, содержащее релейный усилитель с сумматором на входе, который может быть использован в качестве регулятора скорости в устройстве для управления электроприводом постоянного тока и дифференцирующее звено З. В этом устройстве скачкообразное изменение параметров или структуры электропривода осуществляется в зависимости от выходНОЙ его координаты (скорости) и ie§ tipb « ЩШ:- :- ----у- у-.;--- -Недостатком этого устройства явля- V Жлич1§ нёабпустймбгх величин автоколебаний тока, прич1той которых является невоЬможность реализации в реальнык системах идеальной производной. Цель изобретения - повышение устой- чИвости электропривода. Поставленная цель достигается тем, что в устройство для управления электроприводом постояйног о тока, выполненное по принципу подчиненного регулирования, содержащее последовательно включенные: релейный регулятор скорости и регуля- тбр тока, ко входам Которых подключе- itibi соответственно выходы фильтров датчика скорости и дагчйка тока, и ди4 ференцирующее звено. ВведейЫ второе дифференцирующее звеНо, два фильтра, блок перемножения и блок деления, при ётоМ вх;од первого дифференцирующего звена подключен к фиЛьтру датчика тока, и выход, йепосредстве но ко входу делй мЫго и через один из| введенных фильт- Ко входу делителя блока деления,, выход которого С1:) с однймйз входов блока перемножения, второй вход которого через второй бведенный фильтр подключен ,к выходу фильтра датчика скорости, а в.ь1х6д блока перемножения соеди нен со входами регулятора бкорости непосредственно и череа второе дифференцирующее звено. ,.j: .„. . ,;., ., . На чертеже представлена блок-схема электропривода постоянного тока. Злейтропривод соЛержит регулятор скорости 1, обстоящий из релейного усилителя 2 и сумматора 3, имеющего входы 5, 6 и 7, причем на; вход подается задающий сигнал. Ко входу 6 подключён выход дифференцирующего звена 8, вход которого средийен с выходом блока пёремйржания 9, kuTOporb в свою очё:. редь соединены с вьixbдa ди блока деления 10 и фильтра 11. Вход 12 делимоГо блока деления соединен с 4ыходом дйфферейцирукзщего звена 13 неггосредст вейно, а. вход 14 деглитеяя того же блока деления через фильтр 15. Выход фильтра 16датчцк1а тока соединен со входом диф ференцирующего звенег сумматора 17нб входе регуля -ора тока 18, выход которого соедийен сс)входом си:с§ёш| импульсйо-фазоврго управления 19, а выход фильтра 20 датчика сйо йШ 6 входом фильтра 11 и со входом 5 регулятора скорости. Силовая часть эпектропривода содержиттрансформатор 21, версивный тиристорный преобразователь 22, уравнительные дроссели 23, сглаживающий реактор 24 и шунт 25, являющийся датчиком тока. На валу электродвигателя 26 установлен датчик скорости - тахогенератор 27. Электропривод Постоянного тока работает следующим образом. При подаЧе на вход регулятора скорости сигнала управления релейный усилитель 2 в зависимости от полярности входного сигнала Занимает одно из двух возможных состояний. С его выхода сигнал пЬслёцовательно поступает на вход cyiviMaropa 17 и далее на вход регулятора 18, с выхода которого на вход системы 19, а затем на управляющие электроды преобразователя 22. При этом в зависимости от Полярности входного сиг- нйла Ьткрйваётся одна из двух тиристорных групп. В якорной цепи появляется ток. Двигатель 26 начинает вращаться. Информация о величине тока снимается С резистора 28 и через фильтр 16 поступает на второй вход блока сравнения 17. Информация о скорости снимается-с тах огенератора 27 и через фильтр. 2О поступает на вход регулятора.скорости. С выхода дифференцирующего устройства имеем сигнал, оценивающий величину производной от скорости. Параметры диф ференцирующего звена 13 выбираются таким образом, чтобы выделить из тока переменную составляющую. Сигнал с выхода звена 13 поступает одновременно на первый вход 12 делителя 10 и вход фильтра 15. Динамические характеристики фильтра подбираются аналогичйыми дИйамическйм характеристикам последовательного соединения, состоящего из тахогенератора 27,фильтра 20 и фильтра 11. Тогда отношение сигналов с выхода фильтра 15 и дифференцирующего звена 13 пропорционально величинеэлектро-, Механической постоянной времени двигателя, Переменйая составляющая тока, 5гмнрженййй йа электромеханическую . прс-гоянную, есть величина пропорциональная идеальной производной от скорости двигателя. Описанные преобразования сйГйалбв осуществляются с помощью блоков умножения 9 и деления 10 таким образом, что на выходе блока умножения имеем сигнал, пропорциональный идеальной производной от скорости, котррый постРупаетйа четвертый вхбд сумматора . и вход эвена 8. С выхода звена 8 име,ем сигнал, оценивающий величий второй производной от скорости. На входе релейного элемента имеем следующую совокупность сигналов; Cj,uJ+c,ujt( / где (.0 - выходной сигнал внутреннего дифференциатора 8; U) -сигнал на выходе умножителя; jj - выходной сигнал филбтра 15; и - входной сигнал управления; в - сигнал на входе релейного элемента; С., иСкоэффициенты пропорциональности. При изменении знака сигнала 6 относительно, начального происходит переклю чение релейного элемента. При этом уменьшается величина тока в якорной цепи двигателя, а следовательно уменьшается U) и i . При изменении знака е опять происходит переключение релейного элек1ента в первоначальное положе- ние. Благодаря отсутствию запаздывания в реализации производной процесс перек- лючения релейного элемента; происходит с большой частотой. При этом средние величины сигналов OJ , U , Ы подчиняются равенству: , ср :Где , Ы,р,СОср - средние величины сигналов СО ,10 W , соответственно. : Движение системы во время переходного процесса в целом определяется по следним равенством. Установившееся соетояние характеризуется равенством , При этом, среднее значение Тока . YKTTTT - - V / % якорной цепи равно нулю, 1Ц,р 0 И ср О. Двигатель вращается с заданной скоростью; При подключении входа дифференцирующего звена 13 к фильтру датчика тока, а выхода к первому входу блока деления и входу фильтра, выхода фильтра к второму входу блока деления, выхода блока деления к первому входу блока перемноже НИИ, и соединении его второго входа с выходом фильтра 11, а выхода блока перемножения с четвертым входом сумматора и входом дифференцирующего звена 8, выход которого соединен с третьим входом сумматора, значительно точнее регулируется требуемая для управления перваяпроизводная от выходной координаты скорости, это позволяет реализовать асимптотически устойчивую .систему. Формула и. 3 о б р е т е н и я Устройство для управления электроприводом постоянного тока, выполненное по тфинципу подчине1шого регулирования, содержащее последовательно включенные, релейный регулятор скорости и регулятор тока, ко входам которых подключены соответственно выходы фильтра датчика скорости и датчика тока, и дифференцирующее звено, отличающееся тем, что, с целью повышения устойчивости электропривода, в. него введено второе дифференцирующее звено, два фильт- ра, блок перемножения и блок деления, при этом вход первого дифференцирующего звена подключен к фильтру датчика тока, а выход непосредственно ко входу делимого и через один из введенных фильтров-ko входу делителя блока делекия, выход Которого соединен с одним из входов блока перемножения, второй вход которого через второй введенный фильтр подключен к выходу фильтра датчика скорости, а выход блока перемножения соед1шен со входом одного регулятора скорости непосредственно и через второе дифференцирующее звено со входом другого регулятора скорости. . Источники информации, принятые во внимание при экспертизе 1.ПатентСША № 3781626, кл. Q 05 в 13700, 1973. 2.Патент Франции № 2218689, кл. Q 05 в 13/00, 1974. 3.Авторское свидетельство СССР № 124548, кл. q 05 в 13/00, 1959..
-И
А г М --Ш
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 1994 |
|
RU2060530C1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2397529C2 |
| Электропривод постоянного тока | 1984 |
|
SU1228208A2 |
| Самонастраивающийся электропривод робота | 1990 |
|
SU1773714A1 |
| Устройство для регулирования скорости многомассового упругого механизма | 1980 |
|
SU900265A1 |
| Самонастраивающийся электропривод | 1986 |
|
SU1352454A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 2015 |
|
RU2592036C1 |
| Система управления | 1984 |
|
SU1211688A1 |
| Электропривод постоянного тока | 1986 |
|
SU1411907A1 |