(54) ДАТЧИК УГЛОВЫХ ПЕРЕМЕЩЕНИЙ ВАЛА
| название | год | авторы | номер документа |
|---|---|---|---|
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2008 |
|
RU2378618C2 |
| Датчик положения | 1981 |
|
SU1001140A1 |
| Устройство для управления работойпуТЕВОгО ВыКлючАТЕля | 1979 |
|
SU805437A1 |
| УНИВЕРСАЛЬНЫЙ ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2012 |
|
RU2494345C1 |
| Электропривод | 1981 |
|
SU1083319A1 |
| ГИРОКОМПАС | 2007 |
|
RU2339910C1 |
| Способ потактового управления несколькими шаговыми двигателями с помощью персонального компьютера по каналу USB и устройство для его осуществления | 2018 |
|
RU2704486C1 |
| Устройство для управления работой путевого выключателя | 1979 |
|
SU807878A1 |
| Датчик положений рабочего органа механизма | 1979 |
|
SU873132A1 |
| Устройство для измерения угла поворота вала | 1972 |
|
SU485306A1 |
Изобретение относится к измерительной технике и может быть использовано для контроля положений рйбочих органов механизмов.
Известно устройство для измерения угла поворота вала, содержащее постоянный магнит, устанойлейный на Всшу, магнитоуправляемые контакты, усилители мощности и шаговый двигатель 1 .
Недостатком устройства является невысокая точность измерения прн наличии внешних магнитных полей и кояебаиияк температуры окрулсаквдей среды
Шиболее близким по технической сущности и достигаемому эффекту к предлагаемому является датчик угловых перемещений вала, содержащий постоянный магнит, установленный на валу, источник питания, магнитоуправляемые контакты и шаговый двигатель, обмотки которого одними Лонцайи соединены с источником питания 2J.
Недостатком этого устройства является невысокая надежность работы датчика в широком диапазоне изменения температуры окружающей среды и внешних магнитных полей.
Цель изобретения - повышение надежности работы..
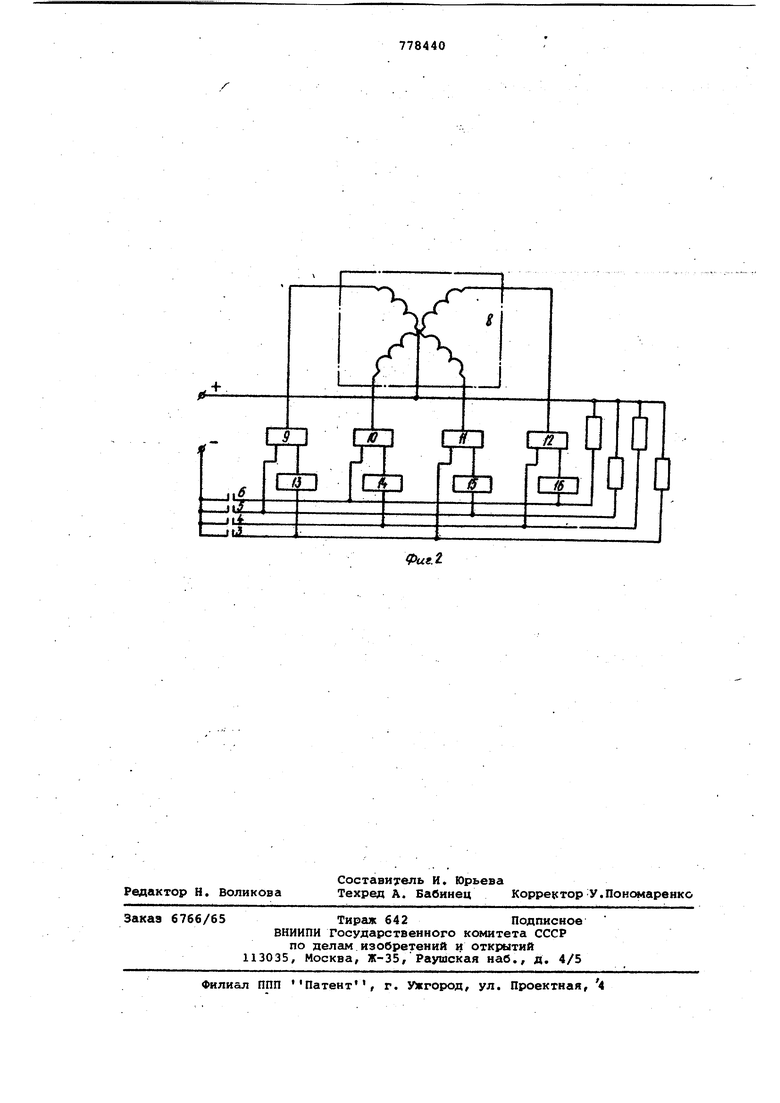
Это достигается тем, что он снабжен четырьмя двухвходобыми схемами совпадения и четырьмя инварторами, вшсодаа которых подключены к первым входам совпадения, второй вход первой йхемы совпадения соединен с третьим магнитоуправляемым контактами и входом третьего инвертора, втор1ой .входвторой схемы совпадения соедиfOнен с 4eTBepTbBs4 магнитоуправляемым контактом и входом четвертого инвертора, второй вход третьей схемы совпадения соединен с первым магнитоуправляемым контактном и входом перво15го инвертора, второй вход четвертой схемы совпадения соединен с вторым магнитоуправляемым контактом и входом второго инвертора, d выходы схем совпадения соединены с вторыми кон2дцами соответствующих обмоток шагового двигателя.
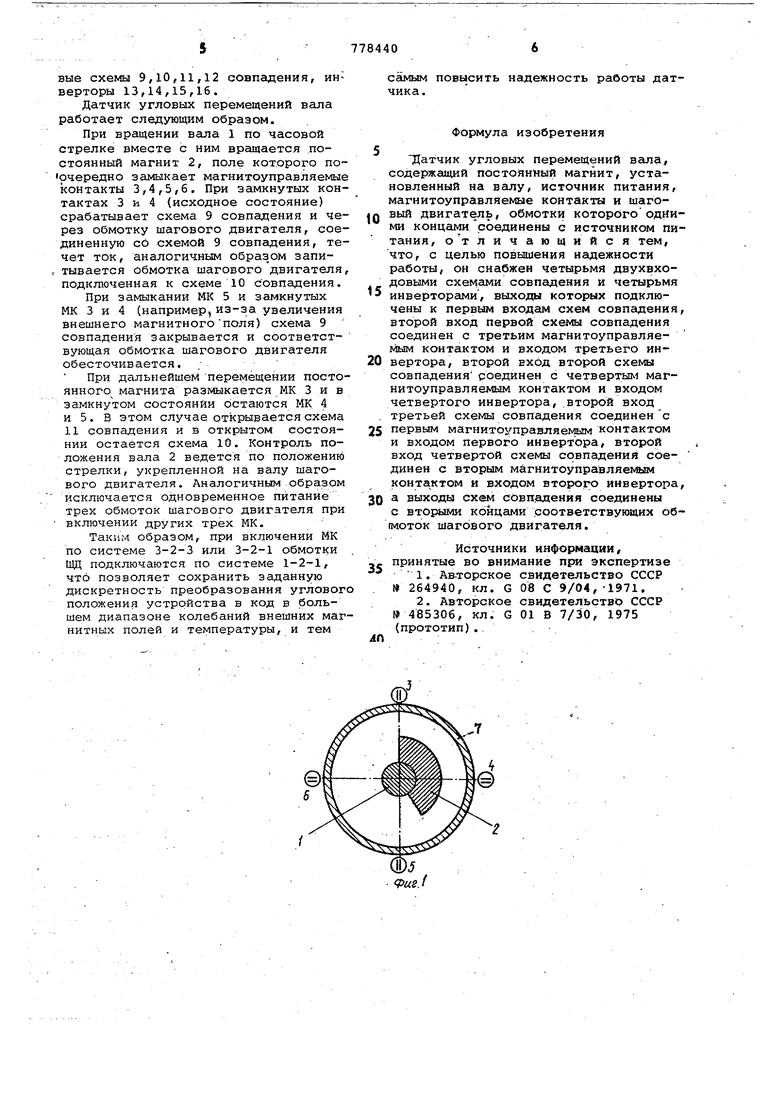
На фиг. 1 показан предлагаемый |датчик; на фиг. -2 - электрическая схема датчика.
25
Датчик угловых перемещений вала сод;ёржйт устамбвленный на валу Г п6стояиаь магнит 2, магнитоуправлядамые контакт (МК) 3,,6, расположенные по окружности статора;7, обмотки 8 шагового двигателя (ЩЦ), двухвходо30
вые схемы 9,10,11,12 совпадения, инверторы 13,14,15,16.
Датчик угловых перемещений вала работает следующим образом.
При вращении вала 1 по часовой стрелке вместе с ним вращается постоянный магнит 2, поле которого порчередно замыкает магнитоуправляемые контакты 3,4,5,6. При замкнутых контактах 3 и 4 {исходное состояние) срабатывает схема 9 совпадения и через обмотку шагового двигателя, соединенную сС схемой 9 совпадения, течет ток, аналогичным образцом запитывается обмотка шагового двигателя, подключенная к схеме 10 совпадения.
При замыкании МК 5 и замкнутых МК 3 и 4 (например,из-за увеличения внешнего магнитного поля) схема 9 совпадения закрывается и соответствующая обмотка шагового двигателя обесточивается.
При дальнейшей перемещении постоянного магнита размыкается МК 3 и в замкнутом СОСТОЯНИИ остаются МК. 4 и 5. В этом случае открывается схема 11 совпадения и в открытом состоянии остается схема 10. Контроль положения вала 2 ведется по положению стрелки, укрепленной на валу шагового двигателя. Аналогичным образом исключается одновременное питание
трех обмоток шагового двигателя при включении других трех МК.
Таким образом, при включении МК по системе 3-2-3 или 3-2-1 Обмотки . ШД подключаются по системе 1-2-1, что позволяет сохранить заданную дискретность преобразования углового положения устройства в код в большем диапазоне колебаний внешних магнитных полей и температуры, и тем
самым повысить надежность раОоты датчика.
Формула изобретения
Датчик угловых перемещений вала, содержащий постоянный магнит, установленный на валу, источник питания, магнитоуправляемые контакты и шаговый двигатель, обмотки которогоодними концами соединены с источником питания, обличающийся тем, что, с целью повышения надежности работы, он снабжен четырьмя двухвходовыми схемами совпадения и четырьмя инверторами, выходы которых подключены к первым входам схем совпадения второй вход первой схемы совпадения соединен с третьим магнитоуправляе1 ым контактом и входом третьего инвертора, второй вход второй схемы совпадения соединен с четвертым магнитоуправляемым контактом к входом четвертого инвертора, .второй вход третьей схемы совпадения соединен с первым магнитоуправляемым контактом и входом первого инвертора, второй вход четвертой схемы совпадения соединен с вторым магнитоуправляекалм кон так тени и входом второго инвертора а выходы схем совпадения соединены с вторыми концами соответствующих обмоток шагового двигателя.
Источники информации, принятые во внимание при экспертизе
7
