Преимущество предлагаемого манипулятора заключается в том, что он обеспечивает неограниченное число точек позиционирования и постоянство такта подачи деталей без усложнения конструкции.
Формула изобретения
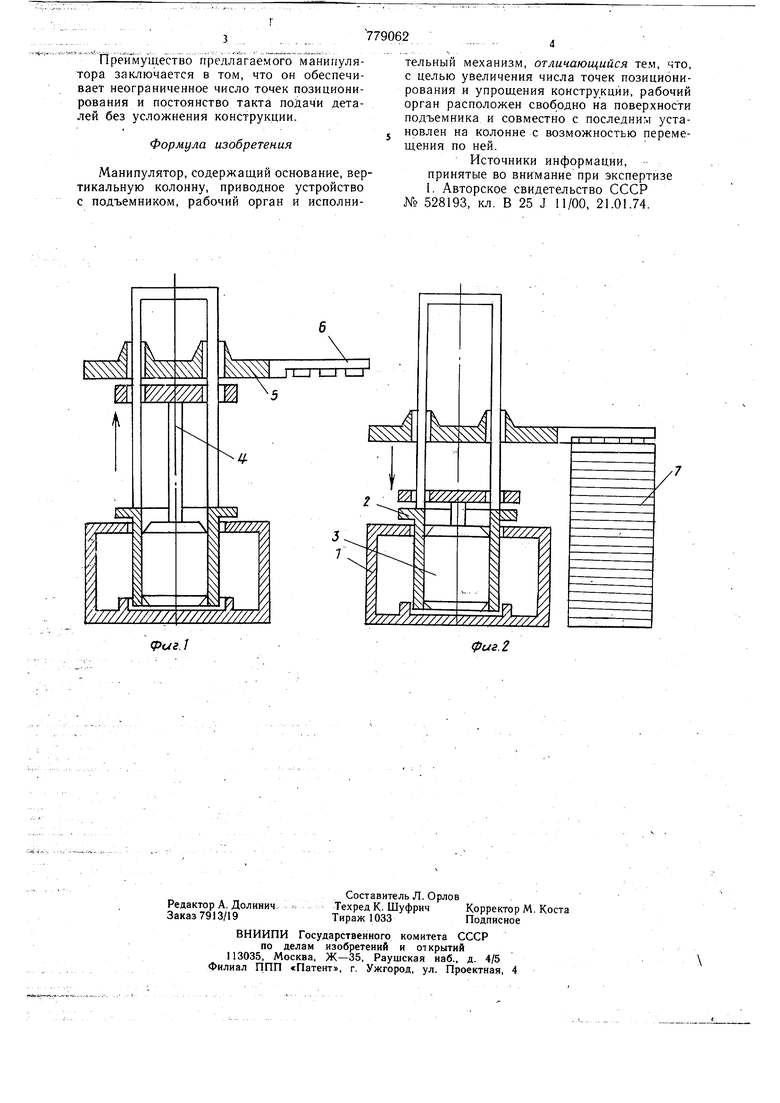
Манипулятор, содержащий основание, вертикальную колонну, приводное устройство с подъемником, рабочий орган и исполнительный механизм, отличающийся тем, что, с целью увеличения числа точек позиционирования и упрощения конструкции, рабочий орган расположен свободно на поверхности подъемника и совместно с последним установлен на колонне с возможностью перемещения по ней.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 528193, кл. В 25 J 11/00, 21.01.74.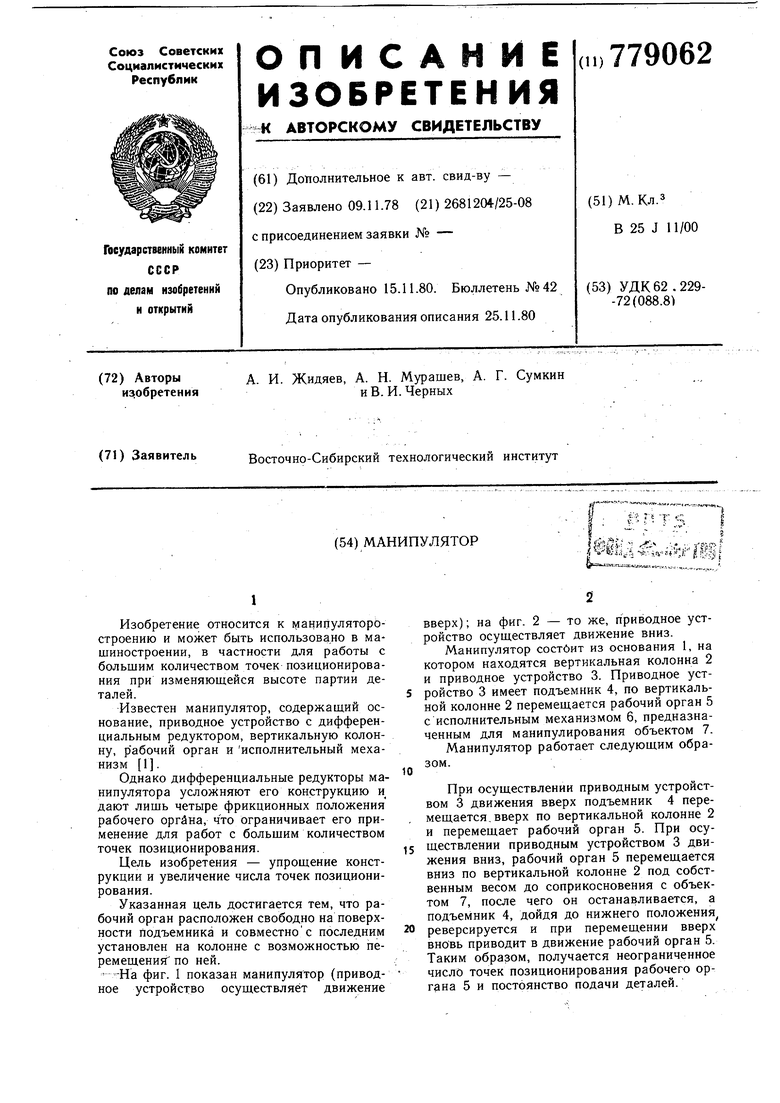
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЧЕСКИЙ ПОДВОДНЫЙ ПЛАНИРОВЩИК | 2006 |
|
RU2334046C2 |
| УСТАНОВКА ДЛЯ ФОРМОВАНИЯ СЫРНЫХ БЛОКОВ И УКЛАДКИ ИХ В ФОРМЫ | 1992 |
|
RU2013049C1 |
| Манипулятор | 1974 |
|
SU528193A1 |
| СПОСОБ КОРРЕКЦИИ ПОЗИЦИОНИРОВАНИЯ ПОДВИЖНЫХ ОРГАНОВ СТАНКА В ПРОЦЕССЕ ОБРАБОТКИ | 2012 |
|
RU2516123C1 |
| Промышленный робот | 1974 |
|
SU503712A1 |
| ВЕРТИКАЛЬНЫЙ ПОДЪЕМНИК | 2022 |
|
RU2777907C1 |
| МАШИНА ДЛЯ ДОБЫЧИ КОРНЕЙ СОЛОДКИ | 1997 |
|
RU2116715C1 |
| ПРОБООТБОРНИК | 2007 |
|
RU2353913C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АВТОМАТИЧЕСКИМ ТРАНСПОРТНО-ПОГРУЗОЧНЫМ МАНИПУЛЯТОРОМ | 1990 |
|
RU2009883C1 |
| Способ разбуривания элементов технологического оборудования в скважине | 2019 |
|
RU2703013C1 |
(раг.1
фиг. 2
