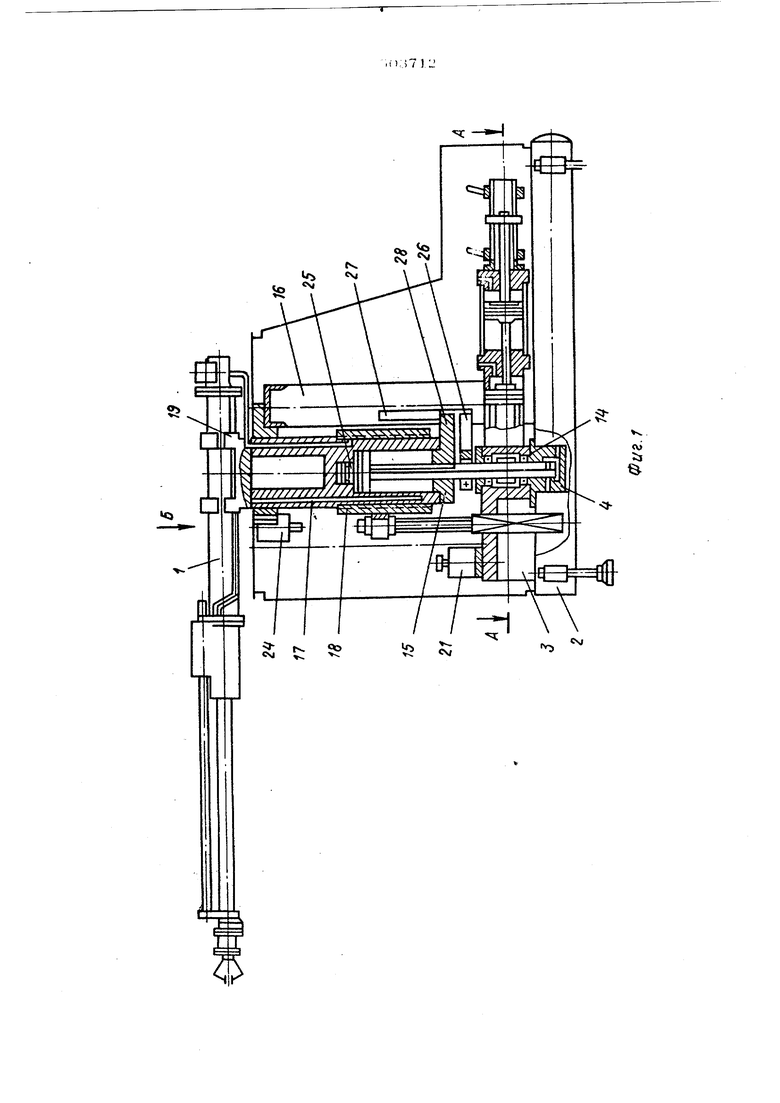
Изобретение относится к области машиностроения, в часгносги к промышленным роботам. Известен промышленный робот, содержащ механические руки, связанные с основанием при помощи устройств поворота и подъема, выполненных в виде зубчато-реечной передачи с шестерней, расположенной на валу устройства подъема, и рейками, выполненными на штоках силовых цилиндров устройства поворота; передний конец реек представляет со бой плунжер гидротормоза. Известный робот со держит также механизм регулирования упоров с датчиками сигнала системы торможения. Цель изобретения - повысить точность при увеличении числа точек позиционирования. Зто дости1ается тем, что за каждым силовым цилиндром рхасположен управляющий цилиндр большого тягового усилия с двумя шгоками, -одиниз которых соед11нен с меха низмом рогулироБания упоров, а второй вы веден в рабочую полость силовог-о цилиндра и {Расположен npi лв датчика сигнала торможения, установленного в поршне силового цилиндра. На фиг. 1 изобр ажен промышленный робог обкщй вид; на фиг. 2 - то же, сечение А-А ;на фиг. 1; на фиг. 3 - то же, вид в плане ;по стрелке Б на фиг. 1. I Промышленный робот состоит из махани- ческих рук 1, связанных с основанием 2, на котором расположены корпус 3 с крыш- кой 4, устройство поворота 5, состоящее из пары силовых цилиндров 6 и расположенных за ними управляющих цилиндров 7 большего тягового усилия с двумя штоками, ОДИЧ КЗ которых - 8 соединен с механизмом регули- руемых ynofjoB 9, а второй - 1О сообщен с полостью силового цилиндра 6 и расположен против датчика И сигнала системы торможения, установленного в поршне 12 силового цилиндра 6, штоки 13 которых выполнены в ви- де реек зубчато-реечной передачи, шестерня которой 14 расположена на валу 15 механизма подъема 16, выполненного в виде колонны 17с нижним коллектором 18 и верхним коллектором 19, являющимся основанием механических рук 1. Передние концы UITOKOB 13 представляют собой плунжеры гидротормозов 20, уггравляемых системой торможения 21, получающей сигналы от датчиков 11, срабаты веющих в завискмости от установленного положения планок 22, закрепленных на штоках 10 фиксируемого гайками 23 механизма регулирования упоров 9. В устройство apjabeMa рук входят тормозной золотник 24, корпус которого является упором, ограничивающим подъем рук, и встроенное тормозное устройство 25. : Передача крутящего момента с вала 15 на колонну 17 производится через кронштейн 26 с рейкой 27, по которой обкатываются ролики, закрепленные на крышке 28. Промышленный робот работает следующим образом. Вертикальное перемещение рук осуществляется подачей сжатого воздуха через каналы ,в крышке 4 и штоке 13-в бесштоковую цилиндра колонны 17 устройства вертикалького подъема рук. Приподходе колонны к упору нажимается кнопка тормозного золотника 24 и останов происходит без удара. При ходе вниз сжатый воздух подается в штоковую полость цилиндра колонны 17, а торможение осу ществляется тормозным устройством 25. Фиксация любых четырех точек в зоне обслуживаемого пространства при повороте рук осуществляется путем последовательной подачи сжатого воздуха в соответствующие полости цилиндров 6 и 7. Ниже приводится пример позиционирования Б одной из точек при повороте рук. При подаче сжатого воздуха в заднюю полость левого цилиндра 7 планка 22 упирается, в заранее установленную при настро ке гайку 23 механизма регулирования упоров 9. Затэм сжатый воздух подается в бесштоковую полость правого цилиндра 6. Поршень этого цилиндра начинает перомешаться вперед и через шток 13 воздейст вует на шестерню 14, которая передает вращение на вал 15, а с него через кронштейн 26, рейку 27 и ролики - на крышку 28 и колонну 17. Шток 13 поршня левого цилиндра 6, связанный, через шестерню с пушвым штоко |начинает отходить назад до упора в передний конец штока 10 левого цилиндра 7. Так как площадь поршня цилиндра 7 больше площади поршня дилинд{)а 6, то поворот щестерни, а значит, и колонны, прекрашается. Безударный останов поворота руки достигается тем, что при подходе левого иггока 13 к штоку 1О нажимается подпружиненная кнопка датчика 11, который дает сигнал на тормозной золотник 21, дросселирующий поток жидкости в магистрали, соединяющей полости гидроцилиндров 2О. Аналогичным образом можно получить еще три точки позиционирования в зоне обсяужиьания робота. Сжатый воздух для привода рук подается ИЗ воздухораспредели-телей (на -нертеж е; не показаны) гЫ ибким трубкамв нижний, имею,ишй возможность только вертикального пе- ремещени коллектор 18, далее по каналам в колонне 17 и через верхний коллектор 19 - в руку 1. Ф о р мула изобретения Гфомышленный робот, содержащий механи- ческие руки, связанные с основанием при помощи устройств подъема и поворота, вы- полнеиных в виде эубчат)-рвечной передачи с щ.естерней, расположенной на валу устройства подъема, и рейками, выполненными на шгоках силовых цилиндров устройства поворота, передний конец которых представляет собой плунжер гидротормоза, и механизм регулирования упоров с датчиками сигнала системы Торможения, отличаюшийс я тем, что, с целью повышения -точности при увеличении числа точек позиционирования, за каждым силовым цилиндром расположен управляющий цилиндр большего тягового усилия с двумя штоками, один из которых соединен с механизмом регулирования упоров, а второй выведен в рабочую полость силового цилиндра и расположен против датчика сигнала системы торможения, ус-танов- ленного в поршне силового цилиндра.

| название | год | авторы | номер документа |
|---|---|---|---|
| Рука промышленного робота | 1979 |
|
SU837848A1 |
| Рука циклового робота | 1976 |
|
SU595143A1 |
| Промышленный робот | 1980 |
|
SU931462A1 |
| Промышленный робот | 1974 |
|
SU503711A1 |
| Устройство для позиционирования руки промышленного робота | 1980 |
|
SU906687A1 |
| Промышленный робот | 1980 |
|
SU965761A1 |
| Промышленный робот | 1979 |
|
SU863330A1 |
| Манипулятор | 1984 |
|
SU1202861A1 |
| Промышленный робот | 1978 |
|
SU776912A1 |
| Манипулятор | 1973 |
|
SU529939A1 |

Составктель В. Павлов
Редактор О. Стенина Техред М. Ликович Корректор А. Гусева Заказ 99Тираж 1067Подписное
ЦНИИПИ Государственного комитета Совета Министров СССР
по делам изобретений и открытий 113035, Москва. Ж-35. Раушская наб., д. 4/5
-г-7 1ТГЧ ;7ент. г. Ужгород, ул7г -1рина. 101
филиал ill 111 iiaiem .
ъ
i5
CM
7)
