Изобретение относится к области машиностроения, в частности к манипуляторам для автоматической иереетановки штучных грузов.
Известны манипуляторы, содержащие рабочий орган с исполнительными механизмами и привод в виде силовых цилиндров.
Однако такие манипуляторы имеют незначительное число точек позиционирования, а остановка захватного органа в промежуточных положениях, обеспечивающаяся за счет .применения путевых переключателей, снижает точность позиционирования и усложняет систему унравления.
С целью увеличения числа точек позишюнирования привод манипулятора снабжен диффер нциальным редуктором, входной вал которого .кинематически связан с о.дни.м из силовых цилиндров, центральное колесо-с другим ци.линдром, а выходной вал - с исполн; тельным механизмом.
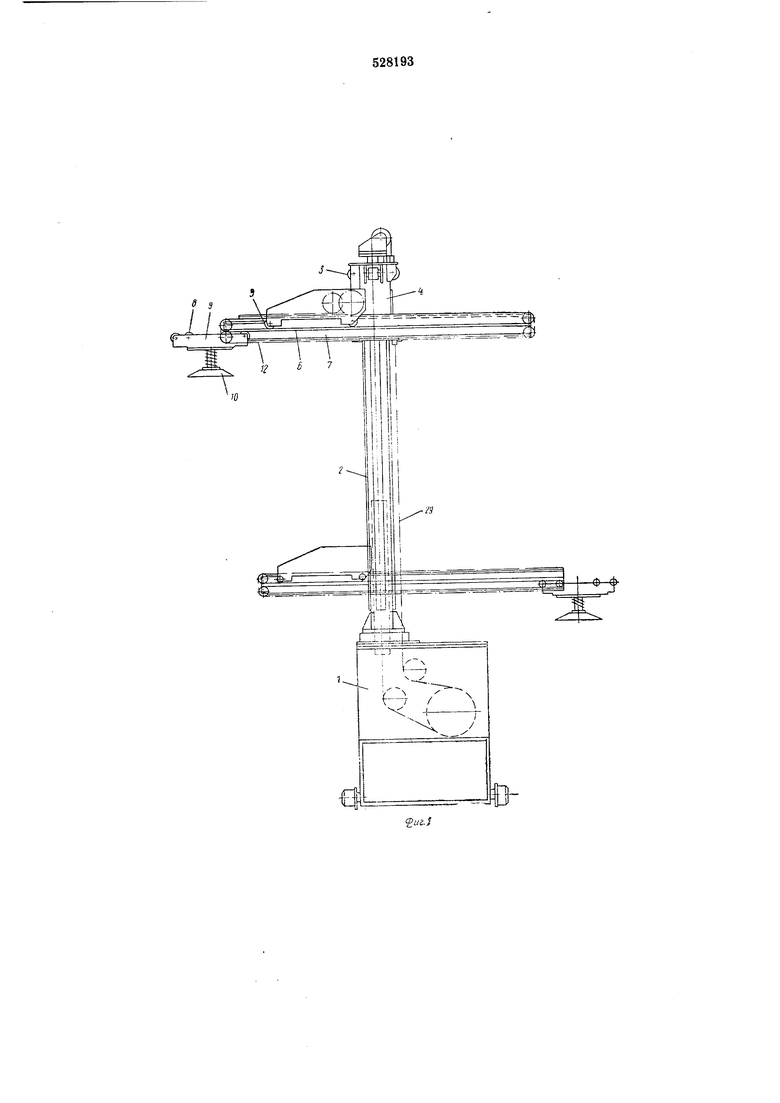
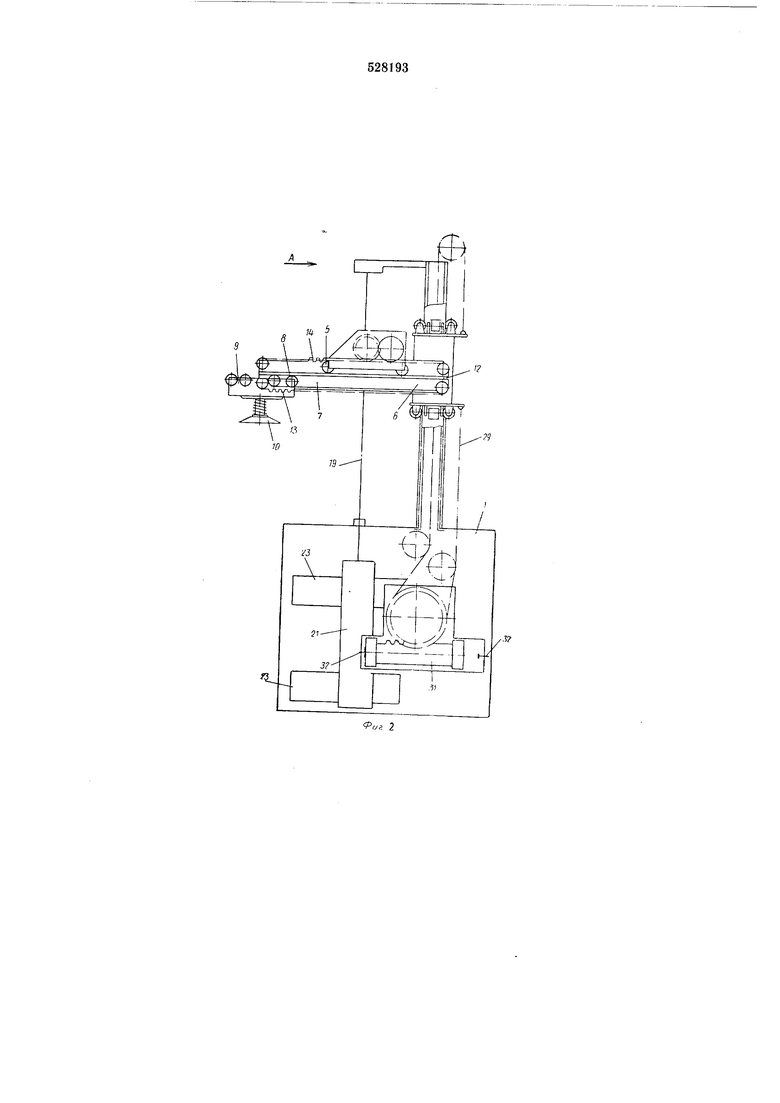
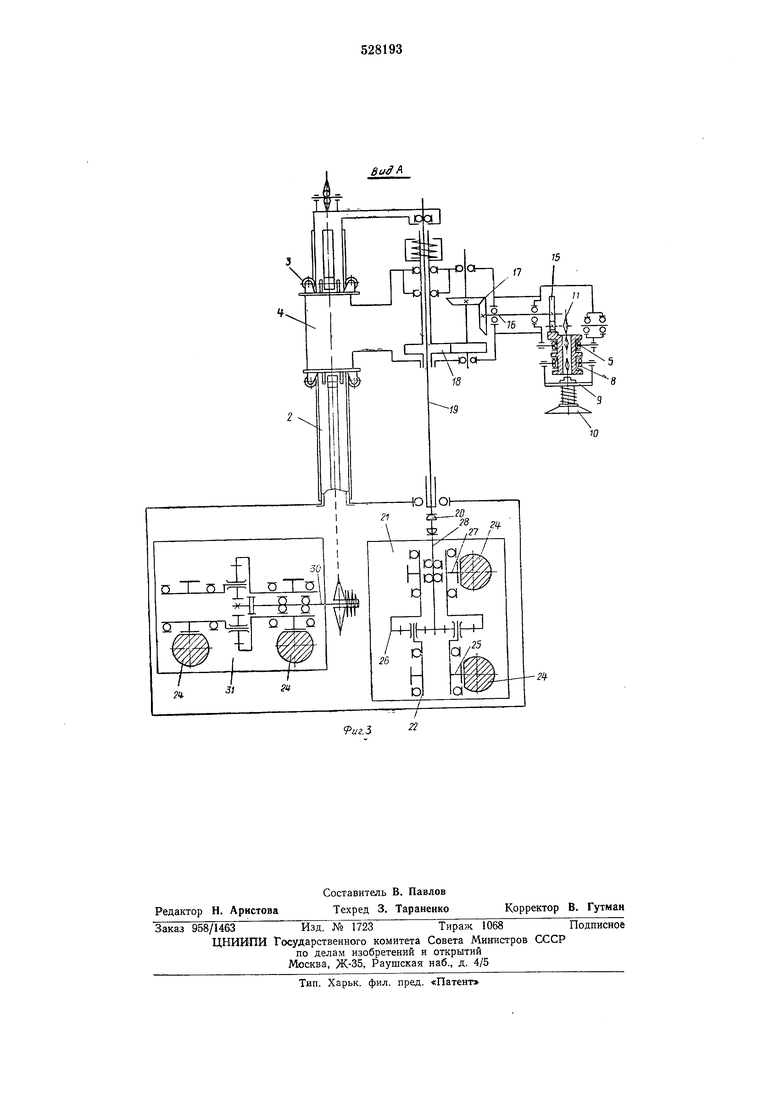
На фиг. 1 изображен общий вид манипулятора; на фиг. 2 - приннипиальиая схема манипулятора, на фиг. 3 - вид по стрелке .-1
и а фиг. 2.
,
Манипулятор состоит из основания А вертикальной колонны 2, по которой па роликах 3 подвижно установлен кронштейн 4. Иа роликах 5 подвижно установлен рабочий орган. Планка 6 имеет продольный паз 7, в KOTODOM
размещены ролик: 8 каретки 9 рабочего органа с захватом 10.
Исполнительный механизм рабочего органа (см. фиг. 3) состоит из звездочки //, взаимодействующей с беско:1ечной цепью 12, охватывающей планку 6 в продольном направлении (см. фиг. 2). Нижняя ветвь цени взаимодействует с зубьями 13 каретки 9. На верхней стороне б имеется рейка 14, взаимодействующая с зубчатым колесом 15, кинематически связанным со звездочкой //.
Зубчатое колесо 15 (см. фиг. 3), а вместе с ним и звездочка // сообщается через вал /о, коническую передачу 17, ц;1лиидрическую передачу 18, ходовой вал 19 с муфтой 20.
5
Привод манипулятора снабжен дифференциальньпг редуктором 21, входной вал 22 которого кинематически связан с из сиЛовых 2.3 через щток-рейку 24 и зубчатое колесо 25, центральное колесо 26 -с другим цl линдpo через зубчатое колосс 27, а выходной вал 28 - с сполнителы;;; М механизмом через муфту 20. Кронштейи 4 связан цепью 29 с выходным залом 30 анл.:о5гичного д фференциального редуктора Л/. Вел 1чина каждого омового г.илиндра огран Ч вается упорами 32.
Манипулятор работает следующ 1М образом.
Для сооби;е П я вертикальных переменке0
«ий кронштейну 4, а вместе с ним планке 6 подается давление в один из цилиндров редуктора 31 (см. фиг. 2). При этом шток-рейка 24 цилиндра, воздействуя на соответствующее зубчатое колесо, вращает выходной вал редуктора, а вместе с ним звездочку цепи 29 (см. фиг. 1), что вызывает перемещение каретки по вертикали.
При количестве цилиндров в дифференциальном редукторе, равном двум, и реверсивной работе штока-рейки каждого цилиндра до упора 32 обеспечивается четыре стационарных положения по вертикали кронштейна 4, а вместе с ним лланки 6.
Горизонтальные перемещения каретки 9 с захватом 10 сообщаются путем подачи давления в один из цилиндров дифференциального редуктора 21. При этом выходной вал 28 редуктора через муфту 20, вал 19, зубчатые передачи 18 и 17 вращает вал 16, а вместе с ним зубчатое колесо 15 и звездочку 11 (см. фиг. 3). Вращение колеса 15 вызывает движение рейки 14 вместе с планкой 6, а вращение звездочки Л вызывает перемещение в ту
же сторону каретки, взаимодействующей с цепью 12.
Таким образом, горизонтальные перемещения каретки с захватом 10 складываются
из суммы перемещений планки 6 относительно кронштейна 4 и каретки относительно планки 6. При числе -цилиндров в дифференциальном редукторе, равном двум, и реверсивной работе штока-рейки 24 каждого цилиядра до упора обеспечивается четыре стационарных положения каретки с захватом.
Формула изобретения
Манипулятор, содержащий рабочий орган с исполнительными механизмами и привод в виде силовы.х цилиндров, отличающийся тем, что, с целью увеличения числа точек позиционирования, привод снабжен диффер«нциальным редуктором, входной вал которого кинематически связан € одним из силовых цилиндров, центральное колесо - с другим цилиндром, а выходной вал - с исполнительным механизмом.
8
-bk
ФШЗ
, I
т
у
(Ч
-
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1989 |
|
SU1796335A1 |
| Манипулятор | 1988 |
|
SU1602660A1 |
| МЕХАНИЗМ ПРИВОДА УПРАВЛЯЮЩЕГО УСТРОЙСТВА | 2024 |
|
RU2826171C1 |
| Захват манипулятора | 1978 |
|
SU768636A1 |
| Манипулятор | 1982 |
|
SU1115899A1 |
| ПОДВЕСНОЕ МАНИПУЛИРУЮЩЕЕ УСТРОЙСТВО С РУЧНЫМ УПРАВЛЕНИЕМ | 2014 |
|
RU2561559C1 |
| УГЛЕДОБЫВАЮЩИЙ БАРАБАННЫЙ КОМБАЙН ДОЛИНСКОГО БКД, СПОСОБ ПОГРУЗКИ УГЛЯ НА КОНВЕЙЕР, БАРАБАННЫЙ ИСПОЛНИТЕЛЬНЫЙ ОРГАН ОЧИСТНОГО КОМБАЙНА, МЕХАНИЗМ ПОДЪЕМА ИСПОЛНИТЕЛЬНОГО ОРГАНА КОМБАЙНА, МЕХАНИЗМ ПОВЫШЕНИЯ УСТОЙЧИВОСТИ КОМБАЙНА, МЕХАНИЗМ ПОДАЧИ КОМБАЙНА | 2001 |
|
RU2244124C2 |
| Следящий привод | 1986 |
|
SU1380932A1 |
| Манипулятор | 1987 |
|
SU1657369A1 |
| Манипулятор | 1986 |
|
SU1359112A1 |
/J
U
Г
Л/ BuJ Л 2 9иг.5 15
