(5О ЖЕЛЕЗНОДОРОЖНАЯ ПЛАТФОРМА ДЛЯ ПЕРЕВОЗКИ ГРУЗОВ В ЕМКОСТЯХ
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПЕРЕГРУЗКИ СТРОЙМАТЕРИАЛОВ И ТРАНСПОРТИРОВКИ К МЕСТУ УКЛАДКИ НА ЭТАЖАХ МОНОЛИТНОГО ЗДАНИЯ И ОСНАСТКА "МАКСИНИО" ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2308408C2 |
| УСТРОЙСТВО ДЛЯ РАБОТЫ НА ВЫСОТЕ | 1992 |
|
RU2018601C1 |
| АВТОМАТИЗИРОВАННАЯ ТРАНСПОРТНО-СКЛАДСКАЯ СИСТЕМА ДЛЯ КОЛЕСНЫХ ШИН | 1990 |
|
RU2013327C1 |
| ЖЕЛЕЗНОДОРОЖНАЯ ПЛАТФОРМА ДЛЯ ПЕРЕВОЗКИ КОЛЕСНОЙ ТЕХНИКИ И КОНТЕЙНЕРОВ | 1998 |
|
RU2151703C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПЕРЕВОЗКИ ГРУЗОВЫХ АВТОМОБИЛЕЙ И САМОХОДНОЙ ТЕХНИКИ | 2008 |
|
RU2368517C1 |
| СКЛАДНАЯ ИНТЕРМОДАЛЬНАЯ ТРАНСПОРТНАЯ ПЛАТФОРМА | 2011 |
|
RU2584043C2 |
| ГРУЗОПАССАЖИРСКИЙ ВАГОН ДЛЯ ПЕРЕВОЗКИ КОЛЕСНОЙ ТЕХНИКИ | 2003 |
|
RU2273573C2 |
| КРАН СТРЕЛОВОГО ТИПА | 2006 |
|
RU2305064C1 |
| Транспортное средство со съемным контейнером | 1987 |
|
SU1636269A1 |
| ПЕРЕХОДНАЯ ПЛАТФОРМА | 1997 |
|
RU2136575C1 |



1
Изобретение относится к средствам транспортировки грузов в емкостях, преимущественно бетона.
Известна келезнодорожная платформа для перевозки грузов в емкостях, содержащая несущую раму, настил рамы и тележки l.
Однако использование такой платформы неудобно, поскольку значительны трудозатраты на погрузку емкостей, их крепление и промывку.
Цель изобретения - автоматизация процесса погрузки емкостей на платформу и упрощение их крепления от продольных перемещений при перевоз- 15 .ке.. .
Поставленная цель достигается тем, что платформа снабжена полыми разделительными стенками, закрепленными на раме через равные расстояния, 20 установленными с возможностью поворота вокруг вертикальной оси на торцах разделительных стенок ловителями емкостей с заклеплёнными на них амбр- тизаторами, приводом поворота лови- 5 телей, габаритными ограничителями, установленными на упомянутых стенках, и устройствами для автоматического управления ловителями,также смонтированными на стенках.30
Привод поворота ловителей может содержать силовые цилиндры, размещенные на раме платформы.
Устройство для автоматического управления ловителями, смонтированное на крайней стенке, может содержать трехходовой пневматический кран, жестко закрепленный внутри стенки и имеющий поворотный рычаг управления, щеку, закрепленную в проеме, выполненном в стенке, с возможностью поворота вокруг горизонтальной оси,тягу, шарнирно соединенную с одной сторопы со щекой, а с другой - с поворотным рычагом управления, и подпружиненный упор щеки, установленный внутри стенки.
Устройство для автоматического управления, смонтированное на средней стенке, может содержать ползун, установленный с возможностью перемещения по направляющим,жестко закрепленным внутри стенки,и имеющий в средней части выступ,охватывающий конец рычага управления трехходового крана, а по краям - отверстия для упомянутых подпружиненных упоров,двуплечие рычаги,шарнирно закрепленные на ползуне, имеющие на конце одного плеча ролик, подпружиненные тяГ-и, проходящие через стенку и шарнирно соединенные с рычагами, и опоры, установленные между стенками .в вырезах, выполненных в настиле на пружинах тяг.
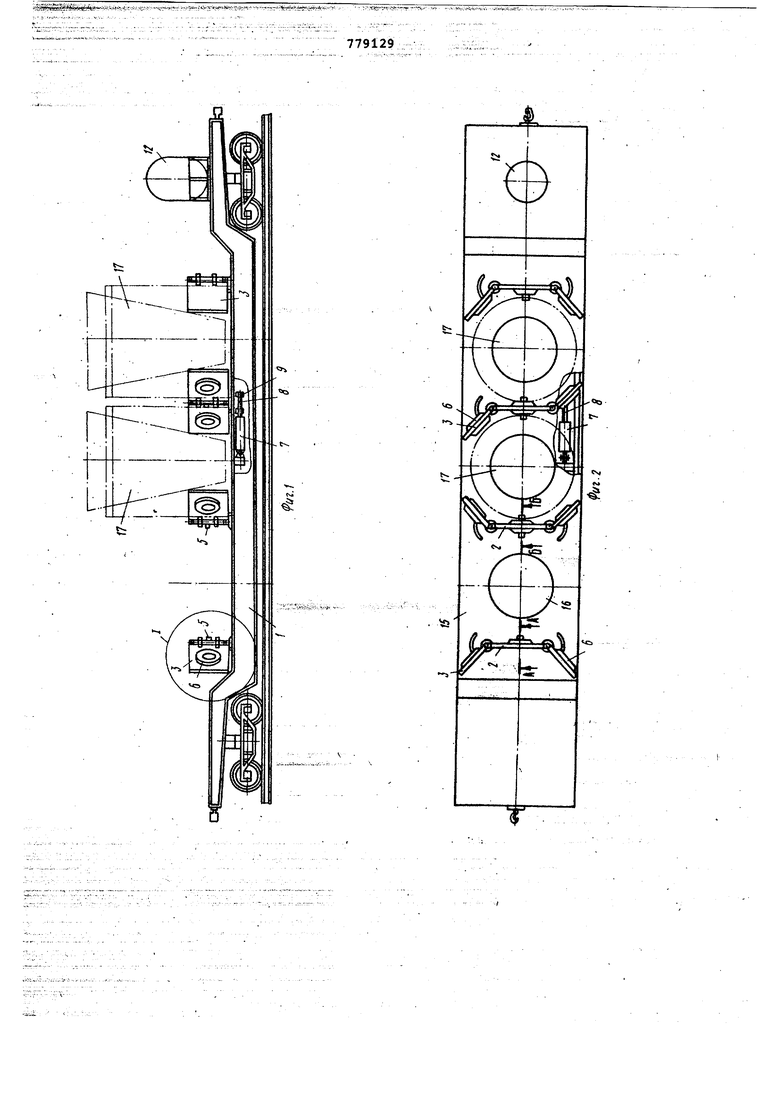
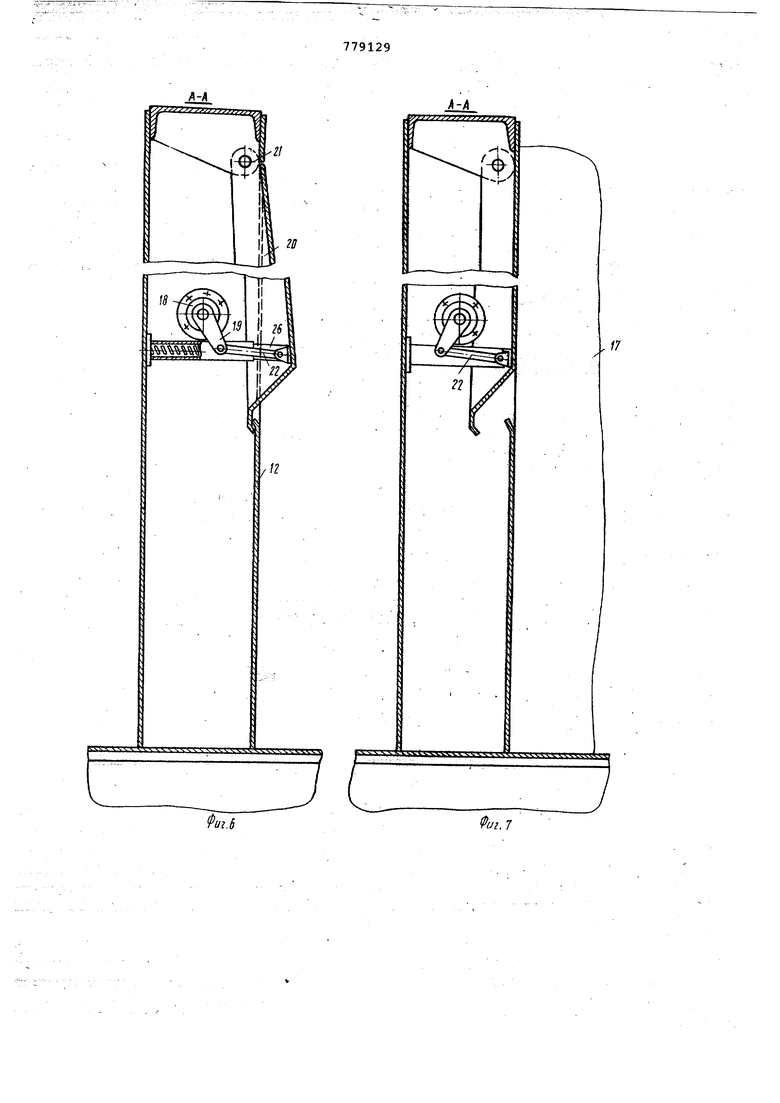
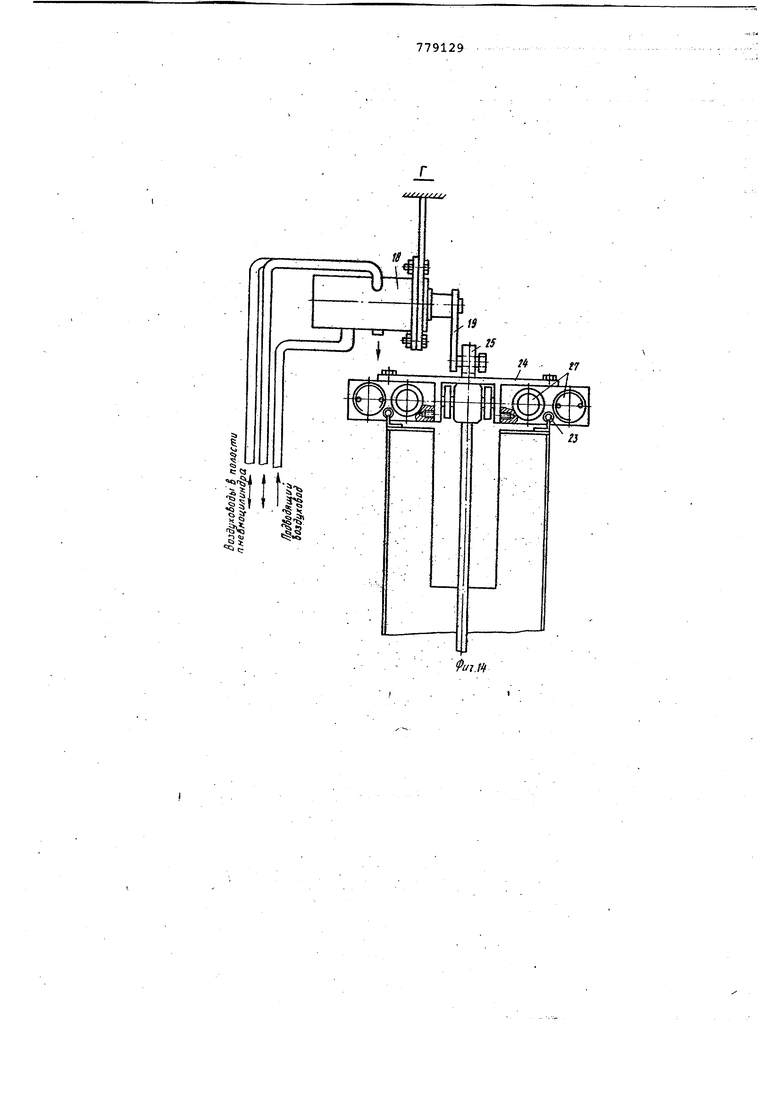
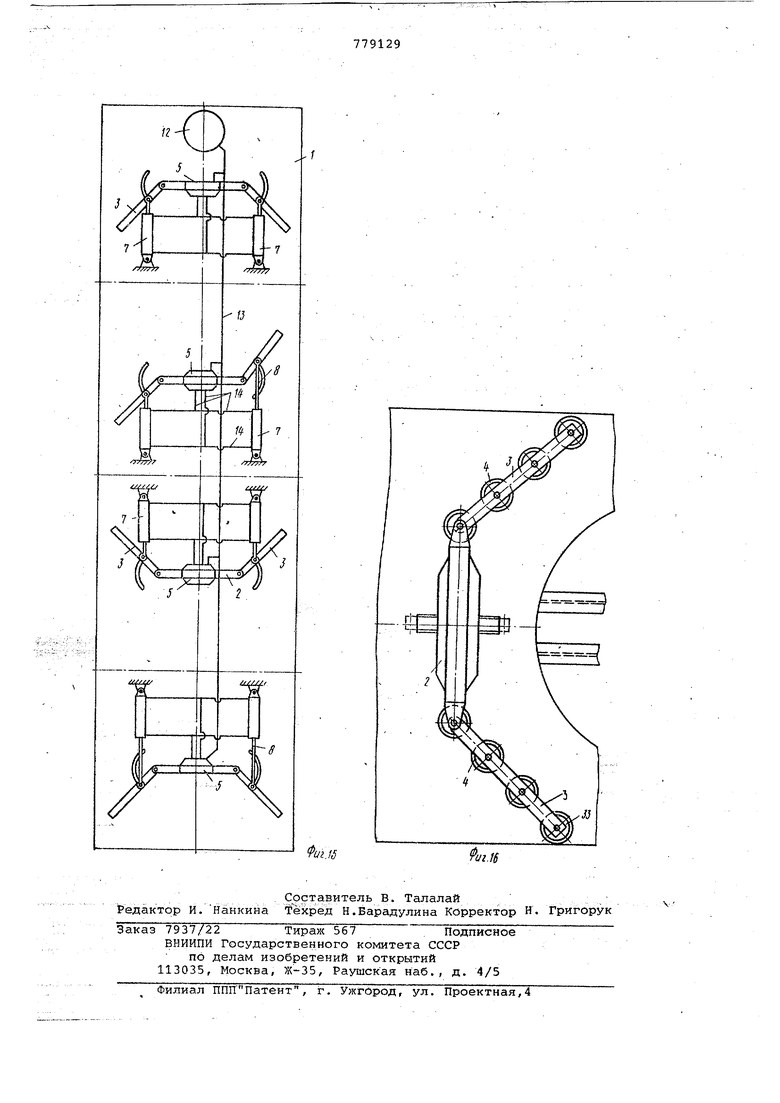
Амортизаторы могут быть установлены на ловителях с возможностью поворота вокруг вертикальной оси и выполнены в виде роликов, имеющих эластичные ободы. Для создания удобств при промывке емкостей в настиле рамы в местазг установки емкостей для грузов могут быть выполнены отверстия. - . На фиг. 1 изображена платформа для перевозки грузов в емкостях, вид . сбоку ; на фиг. 2 - то же, вид сверху; на фиг. 3 - узел 1 на фиг. l|Ha фиг. 4 - то же, вид сверху; на фиг. 5 - разрез В-В на фиг. 4; на фиг.бразрез А-А на фиг. 2, при отсутствии емкости; на фиг. 7 - то же, при наличии емкости; на фиг. 8 - разрез Б-Б на фиг. 2, при OTcyTCTBHH eivmocте й; на фиг . с праТзой стороны емкость прижата к стенке, но не достигла рамы платформы; на фиг. 10 - то же, с правой стороны емкость опутдена на раму платформы на фиг. 11,- то же, с левой стороны емкость прижата к стенке, но не достигла рамы платформы; на фиг. 12 - то же, с левой стороны емкость опущена на раму платформы; на фиг. 13 - то же, с правой сторойы убрана емкость; на. фиг. 14 - вид Г на фиг. 8 при снятой щеке; на фиг. 15 - пневматическая сх ейаприв6да ловителей ; на фиг.16вариант конструкций амортйЗатЬров. На раме платформы 1 установлены разделительные стенки 2, к которым ыарнйрно прикреплены, ловители. 3. На стенках установлены габаритные ограничители 4 и устройства 5 для автоматического управления ловителями.К ловителям прикреплены амортизаторы 6. На раме размещены силовые цилиндры 7 двойного действия, штоки 8 которых соединены с вйступамй 9 ловителей. На вертикальной оси 10 крепления ловителей установлены ролики 11 из эластичного материала. На одном из свободных концов платформы установлен ресивер 12 для сжатого воздуха, С 3ёдйиенный через трубопровод 13, устройства для автоматического упрйвлёнйя и трубы 14 с силовыми цилиндрами. В/настиле 15 рамы платформы выполнены отверстия 16 для: слива воды и остатков груза из емкостей 17.
Внутри стен жестко закреплены трёхходовые пневматические краны 18 с ричагами 19 управления. В проёмах стен размещены цеки 20, укрепленные к стенкам осями 21. Между щеками крайних стен и рычагами трехходовых кранов установлены тяги 22. В средних стенах на направляющих 23, жёстко закрепленных внутри стен.
779129
установлены с возможностью поступа- тельного перемещения ползуны 214,которые своими выступами .25 охватывают гЗычаги трехходовых кранов. Подпружиненные упоры 26 размещены на средних стенах в отверстиях 27 ползунов, а на Крайних стенах прикреплены непосредственно к стенкам.
Двуплечие рычаги 28 с роликом 29 на одном конце шарнирно установлены на ползуЙаСХ. Подпружинен ные тяги 30 шарнирно НрисЪёЯинены к рычагам. Опоры 31 устанр.влены в вырезе настила на пружинах 32 тяг. Амортизаторы лоВйтелей выполнены в виде роликов 33 с эластичными ободами.
Для постановки емкости 17 на платформу емкость краном подводится сбоку к месту установки так, чтобы низ емкости был выше настила 15. Удары емкостей в 3 смягчаются амортизатб1эами б, которые выполнены в виде поворотных роликов 33. При проходе емкости между разделительными стенкам.и 2 включаются устройства 5 для автоматического управления ловителями. Ловители, поворачиваясь, охватывают емкость с разных сторон, обеспечивая ее точное размещение над местом установки. После этого емкость опускается на платформу.
Снятие емкости с платформы осуществляется подъемом вертикально вверх. При этом вновь включаются устройства автоматического управления j ловителями. Ловители поворачиваются в наружйые стороны, освобождая пространство для посТа.новки возвращаемой емкости.Отверстия 16,.выполненные в настиле ра1Ш,11рёдна&начены для уда-, ления остатков груза и воды при промывке емкостей.
Работа устройства автоматического .управления, смЬйТированного на средней разделительной стенке, рассматривается на примере одного из возможных вариантов производства погруз.очно-разгрузрчйых работ, а именно, осуществляемого в последовательности: погрузка ёмкЬс тй мёЩу средними стенками, погрузка емкости между -средней и крайней стенками, выгрузка емкости, размещенной между средними стенками.
При погрузке емкости между средними стенками (фиг,9),емкость нажимает на щеку 20. Поворачиваясь внутрь стенки, щека вначале частично утапливает подпружиненные упоры 26 в отверстиях 27 в теле ползуна 24, вследствие чего ползун перемещается по йаправяяющим 25. Затем щека приходит в Соприкосновение с роликом 29 двуплечего рычага 28, вызывая тем самьлм дальнейшее перемещение ползуна. Поворот щеки прекращается, когда емкость входит 6 соприкосновение с разделительной стенкой.При таком полохсении
щеки ползун максимально сдвинут от середины, рычаг 19 трехходового крана 13, взаимодействующий с выступом 25 ползуна, максимально повернут от нейтрального положения.
Вследствие поворота рычага крана схсатый воздух из ресивера 12 через трубопровод 13, трехходовой кран, трубы 14 поступает .в соответствующие полости силовых цилиндров 7. Под действием сжатого воздуха перемещаются поршни цилиндров, Штоки 8, воздействуя на выступы 9 ловителей, поворачивают последние в сторону емкости.
Опускаясь на настил платформы, емкость перемещает вниз опоры 31, которые через тяги 31 поворачивают двуплечие рычаги, чем обеспечивается возможность перемещения ползуна в сторону погруженной емкости, что необходимо для дальнейшей работы (фиг. 10).
При погрузке емкости на место между крайней и средней стенками (фиг.11), емкость через щеку нажимает на ролик двуплечего рычага и тем самым перемещает ползун и рычаг крана в другое крайнее положение. При этом вновь срабатывает пневматическая система и ловители центрируют устанавливаемую емкость.
Нажатие емкости на опору(фиг.12) вызывает поворот двуплечего рычага и ползун под действием подпружиненных упоров перемещается в среднее положение, а рычаг крана управления занимает нейтральное положение. Сжатый воздух выпускается из силовых цилиндров в атмосферу, при этом ловители не препятствуют выгрузке емкостей в любой последовательности. При: выгрузке емкостей(фиг.13) опоры поднимаются вверх и устройство для автоматического управления возвращается в исходное состояние.
Работа устройств автоматического управления, смонтированных на крайних стенках(фиг. б и 7),принципиально не отличается от выше описанного.
Формула изобретения
автоматического управления ловителя ми, смонтированное на крайней стенке, содержит трехходовой пневматический кран, жестко закрепленный внутри стенки и имеющий поворотный рычаг управления, щеку, закрепленную в проеме, выполненном в стенке, с возможностью поворота вокруг горизонтальной оси, тягу, шарнирно соединенную с одной стороны со щекой, а с другой - с поворотным рычагом управления, и подпрухшненный упор щеки, установленный внутри стенки.
автоматического управления, смонтированное на средней стенке, содержит ползун, установленный с возможностью перемещения по направляющим, жестко закрепленным внутри стенки, и имеющий в средней части выступ, охватывающий конец рычага управления трехходового крана, а по краям - отверстия для упо1иянутых подпружиненных упоров, двуплечие рычаги,шарнирно закрепленные на ползуне, имеющие на конце одного плеча ролик, подпружиненные тяги, проходящие через стенку и шарнирно соединенные с рычагами, и опоры, установленные между стенками в вырезах, выполненных в настиле на пружинах тяг.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР
№ 472898, кл. В 65 J 1/02, 1972(прототип) .
U
t-, ,
JL±
Л-4
/7
игЛ
