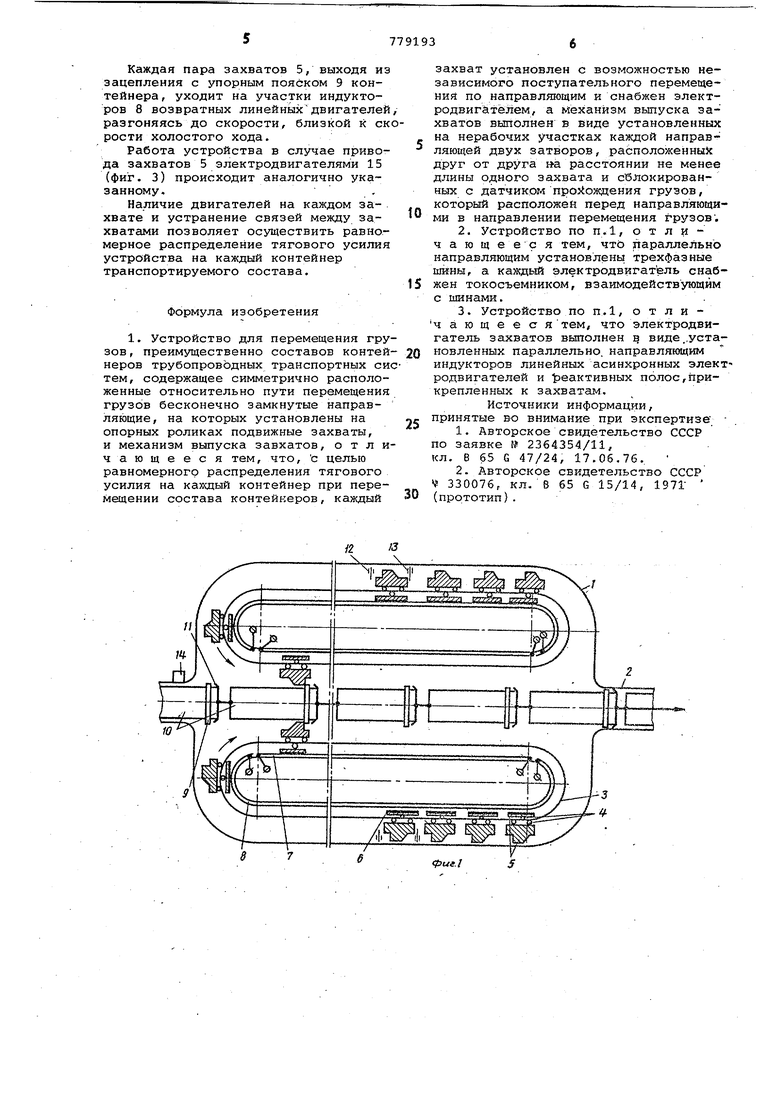
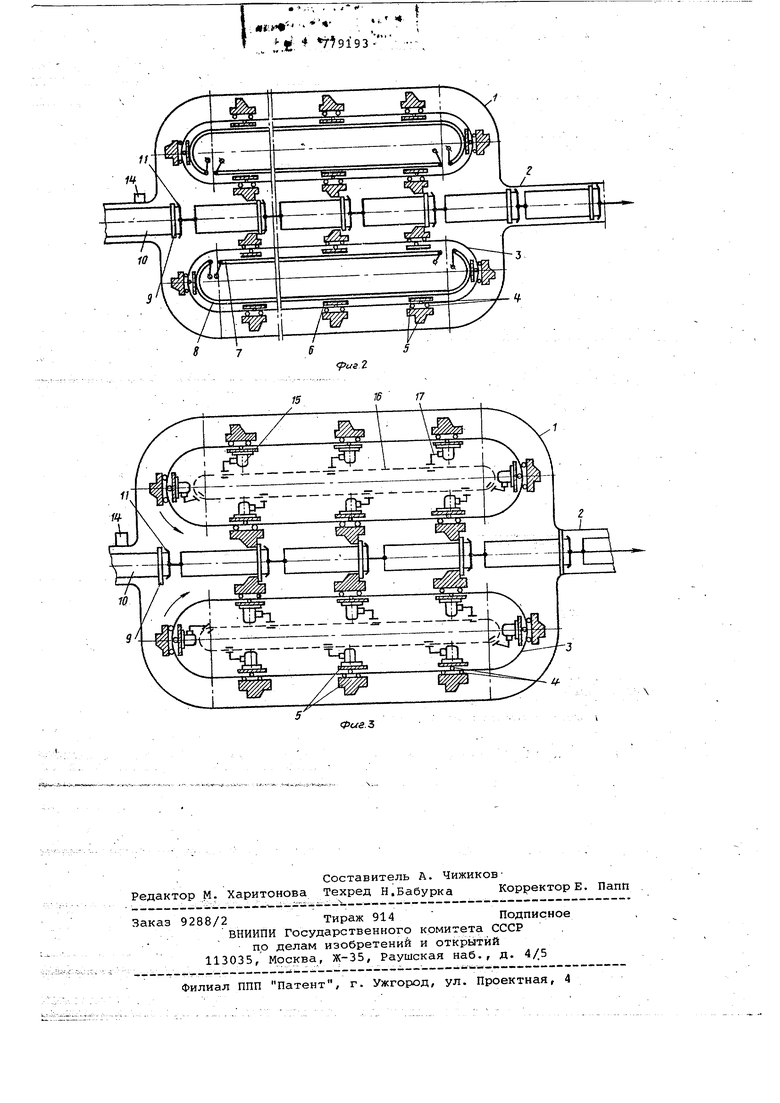
Изобретение относится к области , транспортной техники и предназначено для перемещения в зону повьпиенного давления непрерывного состава контейнеров при транспортировке груза по кольцевым поточно-контейнерным трубопроводным системам. Известно устройство для перемещения грузов, преимущественно контейнеров трубопроводных пневмотранспортных систем, содержащее две параллельно расположенные вертикально замкнутые тяговые цепи, огибающие натях ные и приводные звездочки и соединенные между собой траверсами, имеющими ролики, взаимодействующие с грузом 1 . Однако при высоких скоростях транс портировки (10-15 м/с), характерных для поточно-контейнерных систем, где в зону повышенного давления переводится непрерывный состав контейнеров это устройство применить трудно, так как при увеличении скорости вращения приводных звездочек и числа траверс с роликами возрастают динамические на грузки на тяговые цепи и траверсы, практически невозможно осуществить равномерное распределение суммарного тягового воздействия на каждый контейнер и, как следствие этого, пада-. ет надежность устройства. Кроме того, одностороннее размещение траверсы относительно оси контейнера создает перекашивающие нагрузки на контейнеры. Известно также устройство для перемещения грузов,, содержащее римметричко расположенные относительно пути перемещения грузов бесконечно замкнутые направляющие, на которых установлены на опорных роликах подвижные захваты, и механизм выпуска за сватов с коробкойпередач 2. В таком устройстве захваты закреплены также на тяговых цепях с постоянными минимальными интервалами между собой, равными наименьшей длине перемещаемых грузов. При транспортировке грузов большей длины оператор, зная их длину, с помощью коробки передач устанавливает режим работы устройства и задает необходимый для этих грузов шаг между захратами, изменяемый на : величину, кратную минимальному интервалу. Двустороннее размещение направляющих относительно пути перемещения гру зов устраняет перекашивающие нагрузки на грузы, однако при перемещении непрерывного состава контейнеров, даже при минимальны) отклонениях величин интервалов между контейнерами, невозможно осуществить равномерное распределение тягового воздействия на каждый контейнер, так как из-за жесткой связи между захватами один из них возьмет на себя максимальную нагрузку при бездействующих остальных, . --...-,. .- . Целью изобретения является равномерное распределение тягового усилия на каждый контейнер при перемещении состава контейнеров. Эта цель достигается тем, что каж дый захват установлен с возможностью независимого поступательного перемещения по направляющим и снабжен электродвигателем, а механизм выпуска захватов выполнен виде установленных на нерабочих участках каждой направляющей двух saTBtspoB, расположенных друг от друга на расстоянии не менее длины одного захвата и сбло кйрованных с датчиком прохождения грузов, который расположен перед направляющими в направлении перемещени грузов. Параллельно направляющим, могут быть установлены трехфазные шины, а каходый электродвигатель снабжен токосъемником, взаимодействующим с шинами. Электродвигатель захватов может быть выполнен в виде установленных параллельно направляющим индукторов линейных асинхронных электродвигателей и реактивных полос, прикрепленных к захватам. На фиг. 1 изображен .общий вид описываемого устройс.тва, в начале работы; на фиг. 2 - то же, в рабочем режиме; на фиг. 3 - то же, с автономными двигателями, в рабочем режи ме . Устройство для перемещения контейнеров содержит закрепленные в герметичном корпусе 1 симметрично оси трубопровода 2 две замкнутые направляющие 3, вдоль которых размещены на опорных роликах 4 захваты 5, к которым прикреплены реактивные полосы б. Параллельно направляющим установлены индукторы тяговых 7 и возвратных 8 линейных электродвигат лей. Упорные пояски 9 контейнеров состава контейнеров 10 предназначены для сцепления с упорами захватов 5. Контейнеры снабжены уплотнительн ми манжетами 11. Механизм, выпуска захватов включа в себя передние 12 и задние 13 затв ры, связанные с датчиком 14 прохожд ния контейнеров. Затворы 12 и 13 ра положены друг от друга На расстояни не менее длины захвата. - Для привода автономными электродвигателями 15 (фиг. 3) параллельно направляющим 3 устанавливается тре фазные шины 16, с которыми скользящими контактами сцеплены токосъемники 17, подключенные к электродвигателям 15, закрепленным на захватах 5. Необходимое количество пар захватов 5 определяется исходя из величин допускаемых нагрузок на захват и на контейнер. Перед началом процесса перемещения головная часть непрерывного состава контейнеров 10 принудительно заводится в устройство. При этом захваты 5 расположены все вместе на нерабочих участках индукторов 8 возвратных линейных электродвигателей, а первая пара находится между затворами 12 и 13. Устройство работает следующим образом. При подаче головной части состава контейнеров 10 из трубопровода 2 в корпус 1 .включается питание индукторов линейных электродвигателей и механизма выпуска захватов 5. По сигналу датчика 14, фиксирующего прохождение очередного контейнера, открываются затворы 12, освобождая первую пару.захватов 5. Снимая энер-. гию с индукторов 8, захваты 5 начинают двигаться по направляющим 3, как показано на фиг. 1. После выхода первой пары захватов 5 затворы 12 закрываются. Одновременно открываются затворы 13 и, пропуская к затворам 12 следующую пару захватов 5, закрываются. На участках индукторов 8 возвратных линейных электродвигателей захваты 5 имеют скорость близкую к скорости холостого хода, которая на 8-10% превосходит скорость их движения поднагрузкой. Пройдя закругления направляющих 3, захваты 5 догоняют поясок 9 контейнера и подхватывают его, постепенно увеличивая тягу до номинальной величины по мере синхронизации их движения со скоростью движения состава контейнеров 10. .При прохождении следующего контейнера мимо датчика 14 по сигналу последнего освобождается следующая пара захватов 5 и аналогично описанному происходит процесс сцепления захватов 5 с контейнерами 10,. Таким образом, одновременно с выпуском захватов 5 к контейнерам, осуществляется и настройка обоих частей устройствана синхронную работу. С выпуском последней пары захватов 5 затворы 12, 13 убираются с направляющих, и механизмвыпуска захватов отключается. Устройство продолжает работу в квазистатическом режиме, осуществляя перевод непрерывного со- . става комтейнеров 10 в зону повышенного давления. Уплотнительные манжеты 11 обеспечивают непрерывное шлюзование контейнеров в корпусе 1 устройства (фиг. 2), Каждая пара захватов 5, выходя из зацепления с упорным пояском 9 контейнера, уходит на участки индукторов 8 возвратных линейныхдвигателей разгоняясь до скорости, близкой к ск рости холостого хода. Работа устройства в случае привода захватов 5 электродвигателями 15 (фиг, 3) происходит аналогично указанному. Наличие двигателей на каждом захвате и устранение связей между захватами позволяет осуществить равномерное распределение тягового усилия устройства на каждый контейнер транспортируемого состава. Формула изобретения 1. Устройство для перемещения гру зов , преимущественно составов контей иеров трубопроводных транспортных си тем, содержащее симметрично расположенные относительно пути перемещения грузов бесконечно замкнутые направляющие, на которых установлены на опорных роликах подвижные захваты, и механизм выпуска завхатов, отли чающееся тем, что, с целью равномерного распределения тягового усилия на ка)хдый контейнер при перемещении состава контейнеров, каждый захват установлен с возможностью независимого поступательного перемещения по направляющим и снабжен электродвигателем, а механизм выпуска захватов выполнен в виде установленных на нерабочих участках каждой направляющей двух затворов, расположенных друг от друга а расстоянии не менее длины одного захвата и сблокированных с датчиком про: ождения грузов, который расположен перед направляющими в направлении перемещения грузов; 2.Устройство по пЛ, о т л и чающееся тем, что параллельно направляющим установлены трехфазные Шины, а электродвкгатель снабжен токосъемником, взаимодействующим с шинами. 3.Устройство по П.1, о т л и ч а ю щ е е с ятем, что электродвигатель захватов выполнен в виде..установленных параллельно, направляющим индукторов линейных асинхронных электродвигателей и реактивных полос,прикрепленных к захватам. Источники информации, принятые во внимание при экспертизе. 1.Авторское свидетельство СССР по заявке № 2364354/11, кл. В 65 G 47/24, 17.06.76. 2.Авторское свидетельство СССР 330076, кл. В 65 G 15/14, 1971(прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРУБОПРОВОДНАЯ ТРАНСПОРТНАЯ СИСТЕМА И ТРУБОПРОВОДНЫЙ ЛОКОМОТИВ | 2016 |
|
RU2630274C1 |
| Глобальная логистическая система, включающая модули для перемещения людей, систему транспортировки грузов и используемые в ней транспортные средства | 2020 |
|
RU2743800C1 |
| Стан для прокатки непрерывного слитка | 1975 |
|
SU588697A1 |
| Автоматическая грузопроводная транспортная система с автономными транспортными модулями с тяговым линейным электроприводом | 2017 |
|
RU2678917C2 |
| Установка трубопроводного гидротранспорта грузов | 1985 |
|
SU1299911A1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ГОРОДСКОЙ КОМПЛЕКС И АВТОМАТИЗИРОВАННАЯ ПОДЗЕМНАЯ СИСТЕМА АДРЕСНОЙ ДОСТАВКИ ГРУЗОВ | 2013 |
|
RU2526202C1 |
| Транспортная система челночного типа | 2016 |
|
RU2634068C1 |
| СПОСОБ ТРАНСПОРТИРОВАНИЯ ГРУЗОВ ОТ ПОЗИЦИИ ПРИЕМА К ПОЗИЦИИ ВЫДАЧИ И СИСТЕМА ТРАНСПОРТИРОВАНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2018481C1 |
| МОНОРЕЛЬСОВАЯ ТРАНСПОРТНАЯ СИСТЕМА | 2007 |
|
RU2356766C1 |
| Склад штучных грузов | 1983 |
|
SU1131778A1 |
,.,.. I
. ;; .tl: - ;,
