(54)УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ УКЛОНОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ТЕХНИКО-ЭКСПЛУАТАЦИОННЫХ ПОКАЗАТЕЛЕЙ ДОРОЖНЫХ ОДЕЖД | 1996 |
|
RU2114242C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ ПОПЕРЕЧНОЙ УСТОЙЧИВОСТИ ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2329159C1 |
| Напольный малогабаритный стенд для исследования подвесок автомобилей | 2016 |
|
RU2629636C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УКЛОНОВ ПРОФИЛЯ ПОВЕРХНОСТИ АЭРОДРОМНЫХ ПОКРЫТИЙ | 2015 |
|
RU2592930C1 |
| ТЕЛЕЖКА ДЛЯ РЕГИСТРАЦИИ ПАРАМЕТРОВ АВТОМОБИЛЬНЫХ ДОРОГ | 1971 |
|
SU309237A1 |
| ЗАДНЯЯ ТЕЛЕЖКА НАЗЕМНОЙ ТРАНСПОРТНОЙ СИСТЕМЫ | 2014 |
|
RU2568162C1 |
| УПРАВЛЯЕМАЯ ТЕЛЕЖКА НАЗЕМНОЙ ТРАНСПОРТНОЙ СИСТЕМЫ | 2014 |
|
RU2552375C1 |
| Динамическая стабилизация кузова автомобиля | 2017 |
|
RU2675681C1 |
| СИСТЕМА КОНТРОЛЯ И ОГРАНИЧЕНИЯ СКОРОСТИ ТРАНСПОРТНОГО СРЕДСТВА ПО ПАРАМЕТРАМ КУРСОВОЙ И ПОПЕРЕЧНОЙ УСТОЙЧИВОСТИ ПРИ КРИВОЛИНЕЙНОМ ДВИЖЕНИИ | 2022 |
|
RU2825166C2 |
| БАЛАНСИРНАЯ ДИАГОНАЛЬНАЯ ПОДВЕСКА | 2015 |
|
RU2595208C1 |
Однако производительность замеров этой теЛежки невысокая, так как скорость перемещения указанной тележки не может быть выше 5 км/час, в противном случае, при движении по поКрйтию, имеющему неровности, колеса Могут отрываться or поверхности по-- . крытиТг и уменьшится точность замеров, К Т6й;9 ЖетележКа имеет .четыре точКй опирания, что уменьшает точность замеров, записывающее устройство расположено вне кузова автомобиля, что исключает визуальный контроль за записью измеряемых параметров . Транс- гТорТйрбваниё тележКй к месту замеров так)ке представляет определенные трудНОСТИ-у- -. . Целью изобретения является исключение влияний прогиба подвесок при дётхёнии, перераспределения , масс при движении.
Цель достигается тем, чтоплатформа снабЖёна .ТреМя кривошипно-тяговыймеханизмами , состоящими каждый из ЖвУх связанных тягою кривошипов с закрепленной на кузове осью вращения, первый из которых соединен тягой с мостами транспортного средства, а второй с узлами крепления плaтфop 1ы, при этом первый и второй механизмы соединена с правым и левым концами гТёреднего моста и с соответствующими узлами крепления платформы, а третий йеханизм соединен с левым концом зад- него моста ис левым задним узлом крепления платформы;ггричём ДЛИНЫ плечей кривошипов выбираются из соблюдения равенства отношений
И ti t V
где Н и 1i - соответственно величины
вертикальных перемещений ,-.„...,„-...,.. каждого из трех колес и
узла крепления платформы; Ви Ь - соответственно база и
расстояние между двумя
продольнЕйми узлами крепления платформы; К и V - сооТвётсТвенно к :олея и расстояние между двумя
поперечными узлами кре пления платформы.
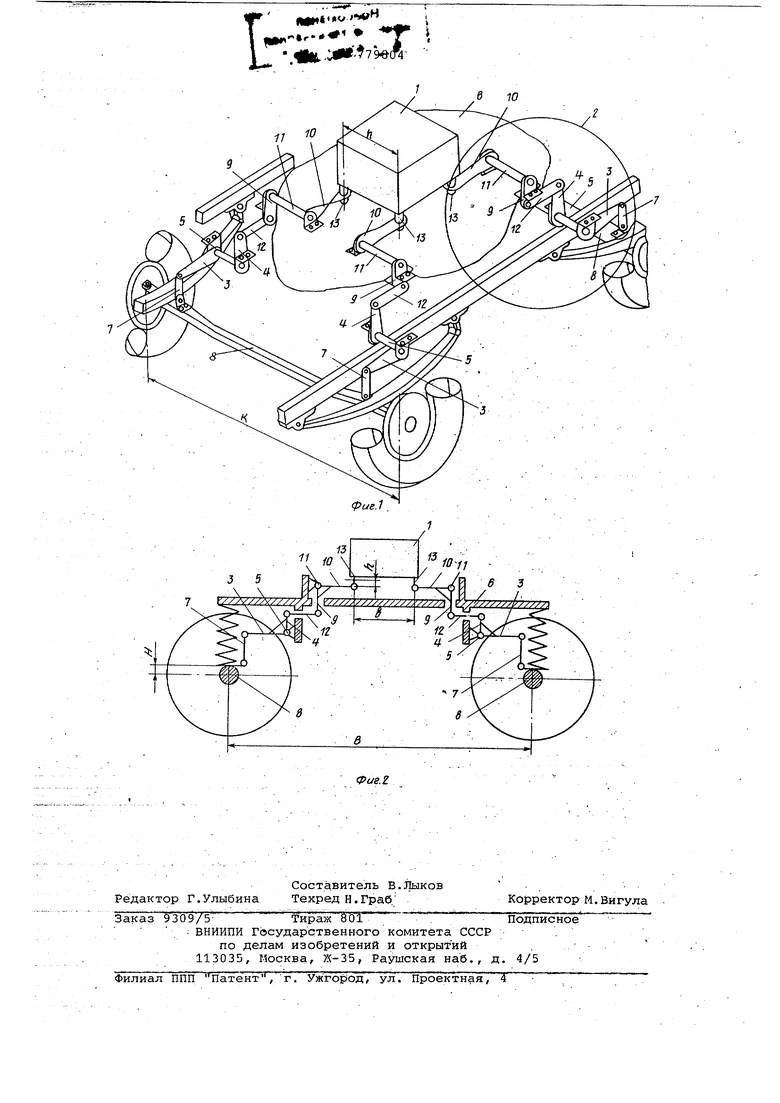
На фиг. 1 показано устройство, общий вид; на фиг. 2 -.то же, кинематиЧёсшя схема.- .,.-...;.,-.,.„.-.-,,
УСТРО.ЙСТВО состоит из платформы 1, несущей гироскопические датчики уклонов (не показаны), и трех кривошипно-тяговых механизмов 2, состоящих из крИвЬшипа с двумя взаимно перпендикулярными рычагами 3 и 4, жестко Закрепленными на оси вращения 5, установленной на кузове 6 автомобиля., 1ТЯГИ 7, шарнирно сочлененной с рычагом 3 и мостом 8 автомобиля, второго кривошипа, аналотичного первому, с рычагами 9 и 10 и осью вращения 11, второй тяги 12, шарнирно скрепляющей рычаги 4 и 9. На конце рычага 10 размещен узел 13 крепления платформы 1.
Устройство работает следующим образом.
После подготовки платформы к измерениям, заключающейся в выводе нулевого положения измерительной оси Гироскопических датчиков к горизонту путем регулировки положения платформы по высоте с помощью устройств, размещенных в каждом узле крепления платформы, автомобиль - лаборатория с закрепленной в нем платформой начинает двигаться по исследуемому участку дорог и. При наезде колеса автомобиля, например, левого переднего, на выпуклость дорожного покрытия, это колесо поднимается вверх относительно кузова на величину Hg , сжимая рессору подвески. Тяга 7 при этом перемещается вверх, приводя во вращение по часовой стрелке (фиг. 1) первый кривошип, который через тягу 12 приводит во вращение против часовой стрелки второй кривошип. При это конец рычага 10 с узлом крепления 13 платформы 1 поднимается на величину
Ьг .
в продольной вертикальной плоскости, проходящей через левыеколеса автомобиля, база автомобиля В и величина вертикального перемещения колеса На образуют прямоугольный треугольник, который параллелен треугольнику, образованному базой крепления b платформы 1 и- величиной вертикального перемещения узла 13 крепления платформы. Если в этих треугольниках будет соблюдаться отношение
В На
ъ - то эти треугольники будут подобны и, следовательно, ГГри условии правильно начальной регулировки их гипотенузы будут параллельны, а уклон измерительной оси платформы в продольной плоскости будет соответствовать фактическому продольному уклону покрытия на данном участке дороги. Аналогично и в поперечном сечении имеется два прямоугольных треугольника, катеты которых образованы в первом колеей автомобиля К и величиной перемещёйия келёСа относительно -кузова Иг, вЪ втором - ра1бстоянйёй Между узлами крепления платформы в поперечной плоскости k и величиной перемещения 1 узла 13 крепления платформы. При соблюдении отношения
К . Ид 1
эти треугольники будут подобны, их гипотенузц параллельны, а уклон измерительной оси в поперечной плоскости будет соответствовать фактическому поперечному уклону покрытия.
Измерение продельных уклонов дороги платформой с предложенным устройством осуществляется по положению левых колес автомобиля, поперечных уклонов проезжей части по положению передней оси автомобиля.
Таким образом, на положение измерительной оси не будут оказывать влияние колебания автомобиля вокруг продольной и поперечной осей, неизбежные при высокой скорости движения, исчезнет ощибка за счет перераспределения масс автомобиля при движении на больших уклонах, а также не будут оказывать влияния перемещения грузов и оператора внутри кузова автомобиля в процессе замеров, увеличится время работы комплекса между повторными тарировками.
Для отключения всей системы во время перегонов предусмотрен механизм (не показан), р соединяющий тягу 7 от моста 8 автомобиля.
Формула изобретения
Устройство для регистрации уклонов, состоящее из платформы, гироскопических датчиков продольных и поперечных уклонов, закрепленное на транспортном средстве без блокировк его подвески, отличающее с я тем, что, с целью исключения влияний прогиба подвесок и перера пределения масс при движении, платформа снабжена тремя кривошипно-тяговыми механизмами, состоящими каждый из двух связанны} тягой кривошипов с закрепленной на кузове осью вращения, первый из которых соединен с мостами транспортного средства, а второй с узлами крепления платформы, при этом первый и второй механизмы соединены с правым и левым концами переднего моста и с соответствующими узлами крепления платформы, а третий механизм соединен с одним из концов заднего моста и с соответствующим узлом крепления платформы, причем длины плечей кривошипов выбираются из соблюдения равенства отношений
5
Л.-В.л,
(
где Н и 1i - соответственно величины
0 вертикальных перемещений каждого из трех колес и узла крепления платформы;
В н t) - соответственно база и расстояние между двумя
5 продольньоми узлами крепления платформы;
К и 1( - соответственно колея и расстояние между двумя поперечными узлами креп-ления платформы.
0
Источники информации, принятые во внимание при экспертизе
5
,
ь
tr
5il6..(fte10
