Изобретение относится к комплексам технических средств обеспечения активной безопасности транспортных средств и может быть использовано в автомобильной технике.
Известно устройство контроля и ограничения скорости транспортного средства по параметрам курсовой и поперечной устойчивости на повороте [Патент RU 152953, В60К 31/00 F02D 41/00], включающее систему, прерывающую подачу топлива, состоящую из электронного устройства определения критической скорости транспортного средства, рассогласователя, разрывающего связь между датчиком положения педали подачи топлива и электронным блоком управления впрыском при достижении действительной скорости транспортного средства, равной критической, тем самым ограничивая скорость транспортного средства, датчики, фиксирующие усредненную полезную нагрузку, датчик, установленный на валу рулевого механизма, фиксирующий угол поворота руля, датчик, установленный на кузове транспортного средства, фиксирующий поперечный наклон дорожного профиля, устройство светозвуковой сигнализации, расположенное на панели приборов, заблаговременно предупреждающее водителя о приближении действительной скорости к критической, устройство ввода параметров технической характеристики транспортного средства, датчик угловой скорости одного из ведущих колес, радар, установленный над ведущим колесом, на котором установлен датчик угловой скорости и определяющий абсолютную линейную скорость этого колеса, при этом датчик, фиксирующий усредненную полезную нагрузку определяет вертикальную координату центра масс.
Недостатками устройства является низкий уровень безопасности криволинейного движения вследствие наличия неточности расчета значений критических скоростей на повороте по причинам: идентификации скорости движения транспортного средства по величине абсолютной линейной скорости одного из ведущих колес; определения сцепных качеств опорной поверхности путем сравнения абсолютной линейной скорости одного из ведущих колес с теоретической, рассчитанной по значениям датчика угловой скорости этого колеса; применения постоянного значения вертикальных и поперечных координат центра масс (в случае возникновения поперечного крена кузова происходит смещение центра масс); применения значения угла поперечного уклона дороги без учета влияния угла крена кузова; отсутствия учета степени влияния на величину радиуса поворота типа поворачиваемости автомобиля.
Значения угла поперечного уклона дороги в рассматриваемом устройстве определяется на основании сигнала датчика, установленного на кузове транспортного средства, и фиксирующего значение угла поперечного наклона кузова. Значения угла поперечного наклона кузова и поперечного уклона дороги могут быть равны только при наличии у транспортного средства жесткой подвески. При этом поперечный наклон кузова (крен) может происходить и при отсутствии поперечного уклона дороги.
При избыточной поворачиваемости реальный радиус поворота по сравнению с теоретическим (расчетным) будет меньше. Соответственно, в данных условиях реальное значение критической скорости по заносу и опрокидыванию будет меньше теоретического (расчетного). Это не позволит устройству обеспечить требуемый уровень безопасности.
При недостаточной поворачиваемости реальный радиус поворота по сравнению с теоретическим (расчетным) будет больше. Соответственно, в данных условиях реальное значение критической скорости по заносу и опрокидыванию будет больше теоретического (расчетного). При этом ограничение устройством скорости движения автомобиля по параметрам устойчивости будет выполняться при безопасных условиях, что приведет к необоснованному снижению средней эксплуатационной скорости движения (подвижности) автомобиля.
Наиболее близким к заявляемому решению (прототипом) является автоматическое устройство контроля и ограничения скорости транспортного средства на повороте по параметрам курсовой и поперечной устойчивости [Патент RU 157919, В60К 31/00], включающее систему, прерывающую подачу топлива, состоящую из электронного устройства определения критической скорости транспортного средства, рассогласователя, разрывающего связь между датчиком положения педали подачи топлива и электронным блоком управления впрыском при достижении действительной скорости транспортного средства, равной критической, тем самым ограничивая скорость транспортного средства, датчики, фиксирующие усредненную полезную нагрузку и определяющие вертикальную координату центра масс, датчик, установленный на валу рулевого механизма, фиксирующий угол поворота руля, датчик, фиксирующий поперечный наклон дорожного профиля, устройство светозвуковой сигнализации, расположенное на панели приборов, заблаговременно предупреждающее водителя о приближении действительной скорости к критической, устройство ввода параметров технической характеристики транспортного средства, датчик угловой скорости ведущих колес, радар, установленный над ведущим колесом и определяющий абсолютную линейную скорость этого колеса, сумматор, определяющий среднее значение линейной скорости колес.При этом датчик, фиксирующий поперечный наклон дорожного профиля, установлен на балке моста, датчик угловой скорости ведущих колес установлен на каждом ведущем колесе, радар установлен над каждым ведущим колесом, а датчики, фиксирующие усредненную полезную нагрузку, определяют значение угла крена кузова по величинам изменения вертикальных и горизонтальных координат центра масс.
Недостатками прототипа являются: низкий уровень безопасности криволинейного движения вследствие наличия неточности расчета значений критических скоростей на повороте, обусловленной отсутствием учета степени влияния на величину радиуса поворота типа поворачиваемости автомобиля; низкий уровень унификации устройства на автомобилях с независимой подвеской, обусловленный установкой датчика, фиксирующего поперечный уклон дорожного профиля, на балке моста. В конструкциях автомобилей с независимой подвеской балки мостов могут не применяться. При этом наклон балки моста вследствие движения по неровностям оказывает влияние на степень точности определения угла поперечного уклона дороги.
Технический результат изобретения направлен на повышение уровня безопасности, унификации, надежности и степени точности определения критической скорости криволинейного движения по заносу и опрокидыванию транспортного средства с любым типом подвески.
Технический результат достигается тем, что система контроля и ограничения скорости транспортного средства по параметрам курсовой и поперечной устойчивости при криволинейном движении, включающая систему, прерывающую подачу топлива, состоящую из электронного устройства определения критической скорости транспортного средства и связанных с ним рассогласователя, разрывающего связь между датчиком положения педали подачи топлива и электронным блоком управления впрыском при достижении действительной скорости транспортного средства, равной критической, тем самым ограничивая скорость транспортного средства, датчики, фиксирующие усредненную полезную нагрузку и определяющие вертикальную координату центра масс, датчик, установленный на валу рулевого механизма, фиксирующий угол поворота руля, устройство светозвуковой сигнализации, расположенное на панели приборов, заблаговременно предупреждающее водителя о приближении действительной скорости к критической, устройство ввода параметров технической характеристики транспортного средства, датчик угловой скорости ведущих колес, радар, установленный над ведущим колесом и определяющий абсолютную линейную скорость этого колеса, сумматор, определяющий среднее значение линейной скорости колес, при этом датчик угловой скорости ведущих колес установлен на каждом ведущем колесе, радар установлен над каждым ведущим колесом, а датчики, фиксирующие усредненную полезную нагрузку, определяют значение угла крена кузова по величинам изменения вертикальных и горизонтальных координат центра масс, содержит установленный на кузове гироскопический датчик, определяющий угол поворота продольной оси транспортного средства относительно прямолинейного движения и угол поперечного наклона кузова относительно нормали и электронное устройство сравнения теоретического расчетного значения углов поворота продольной оси автомобиля, соответствующего углу поворота управляемых колес при нейтральной поворачиваемости автомобиля, с действительным значением, что обеспечивает определение критической скорости криволинейного движения по заносу и опрокидыванию с учетом типа поворачиваемости транспортного средства, поперечного уклона дорожного полотна и поперечного крена кузова.
Отличительными признаками от прототипа является то, что система содержит установленный на кузове гироскопический датчик, определяющий угол поворота продольной оси транспортного средства относительно прямолинейного движения и угол поперечного наклона кузова относительно нормали и электронное устройство сравнения теоретического расчетного значения углов поворота продольной оси автомобиля, соответствующего углу поворота управляемых колес при нейтральной поворачиваемости автомобиля, с действительным значением.
Сущность изобретения заключается в следующем: система предупреждает водителя о приближении скорости движения транспортного средства при криволинейном движении (на повороте) к критическому значению, при котором может наступить занос или опрокидывание, и в случае непринятия водителем действий по снижению скорости, автоматически ограничивает максимальную скорость транспортного средства по условию обеспечения его курсовой и поперечной устойчивости.
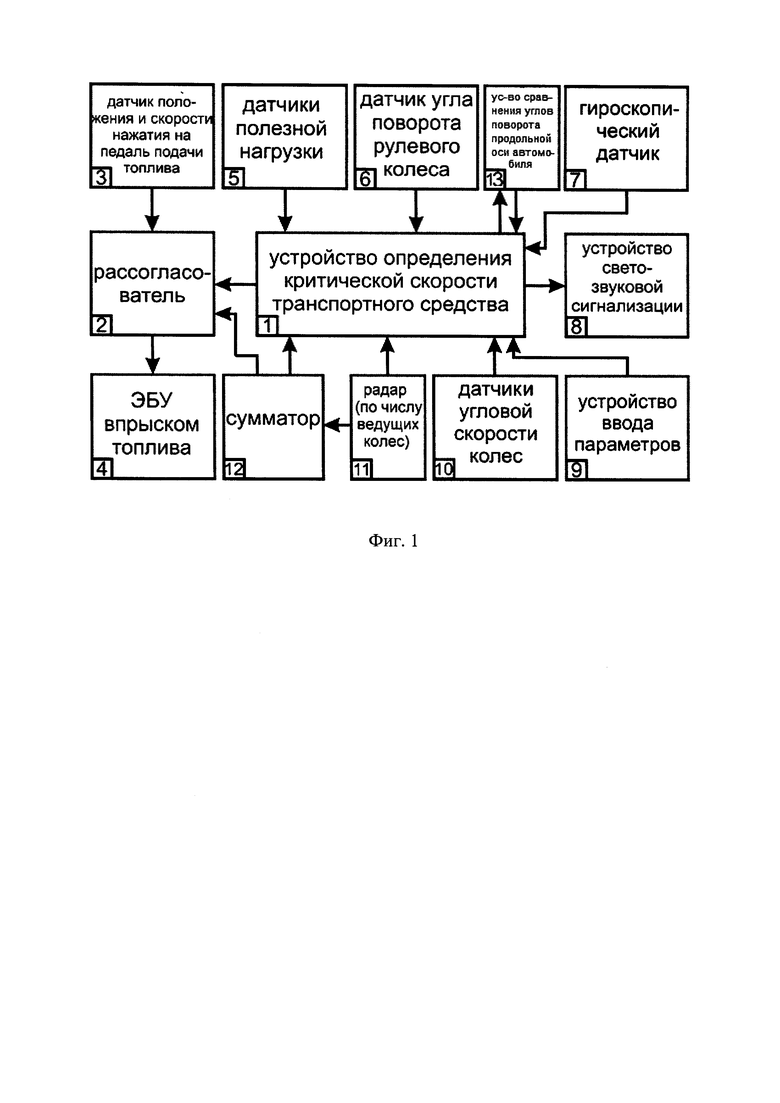
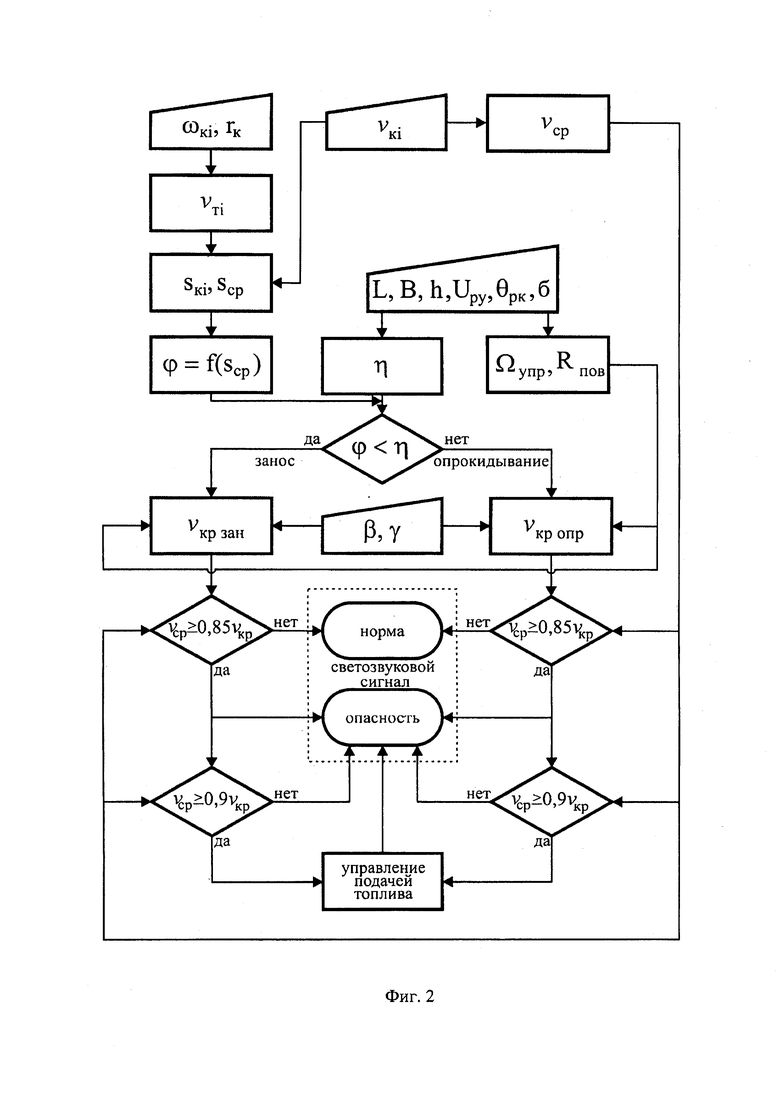
Сущность изобретения поясняется чертежами, где на фиг. 1 показана структурная схема системы; на фиг. 2 - алгоритм работы электронного устройства определения критической скорости транспортного средства.
Система содержит (фиг. 1): электронное устройство 1 определения критической скорости транспортного средства, рассогласователь 2, который разрывает связь между датчиком 3 положения педали подачи топлива и электронным блоком 4 управления впрыском при достижении действительной скорости транспортного средства, близкой к критической, датчики 5, фиксирующие усредненную полезную нагрузку, определяющие вертикальную координату центра масс и величину поперечного крена кузова относительно вертикальной оси транспортного средства, датчик 6, установленный на валу рулевого механизма, фиксирующий угол поворота руля, гироскопический датчик 7, установленный на кузове транспортного средства, фиксирующий поперечный наклон кузова относительно нормали и угол поворота его продольной оси относительно прямолинейного движения, устройство 8 светозвуковой сигнализации, расположенное на панели приборов, заблаговременно предупреждающее водителя о приближении действительной скорости к критической, устройство 9 ввода параметров технической характеристики транспортного средства, датчики 10 угловой скорости ведущих колес, радар 11 (по числу ведущих колес), установленный над каждым ведущим колесом, и определяющий абсолютную линейную скорость этого колеса, сумматор 12, определяющий среднее значение абсолютных линейных скоростей ведущих колес, электронное устройство 13 сравнения теоретического расчетного значения углов поворота продольной оси автомобиля, соответствующего углу поворота управляемых колес при нейтральной поворачиваемости автомобиля, с действительным значением.
Работа системы осуществляется следующим образом. Посредством устройства 9 ввода в систему вводятся значения параметров технической характеристики транспортного средства (L - длина базы, м; В - ширина колеи, м; h - высота центра масс при снаряженной массе транспортного средства, м; Upy - передаточное число рулевого управления; rк - радиус колеса, м;).
В случае загрузки транспортного средства в устройство 1 определения критической скорости со стороны датчиков 5 поступает измененное значение высоты центра масс. В случае бокового крена кузова происходит изменение значений координат центра масс, определяемых датчиками 5 и передаваемых в устройство 1. На основании поправок значений В и h, поступающих со стороны датчиков 5, в устройстве 1 происходит определение коэффициента поперечной устойчивости автомобиля
Одновременно с этим в устройстве 1 происходит определение угла γ (град) бокового крена кузова
где dz и dy - изменение вертикальной и поперечной координат центра масс, соответственно.
Со стороны гироскопического датчика 7, установленного на кузове транспортного средства, в устройство 13 поступает сигнал о значении угла поворота продольной оси 5 (град), а в устройство 1 поступает сигнал о значении угла поперечного наклона кузова а (град) относительно нормали, где на основании разности углов α+γ (знак «+» - если крен происходит от центра поворота, знак «-» - если крен происходит в сторону центра поворота) определяется значение угла поперечного наклона дорожного профиля β (град).
В устройство 1 со стороны датчиков 10 угловой скорости ведущих колес поступает сигнал о значении угловой скорости их вращения ωкi (рад/с), со стороны датчика 6 - сигнал о значении угла поворота рулевого колеса θ (град), со стороны радара 11, установленного над ведущими колесами, -значение абсолютной (реальной) линейной скорости этих колес νкi (м/с). При этом в устройстве 1 происходит определение среднего угла поворота управляемых колес (град)
радиуса поворота транспортного средства (м)
теоретической линейной скорости νтi=rк⋅ωкi (м/с), а также определяется коэффициент скольжения колеса sкi=(νкi-νтi)/ νкi.
Информация о теоретическом расчетном значении среднего угла поворота управляемых колес с устройства 1 поступает в устройство 13.
Далее в устройстве 1 определяется среднее значение коэффициента скольжения  (где n - число ведущих колес) и по функциональной зависимости, заложенной в алгоритм действия устройства 1, определяется значение коэффициента сцепления колес с опорной поверхностью ϕ=f(scp). Затем происходит сравнение коэффициента сцепления с коэффициентом поперечной устойчивости транспортного средства.
(где n - число ведущих колес) и по функциональной зависимости, заложенной в алгоритм действия устройства 1, определяется значение коэффициента сцепления колес с опорной поверхностью ϕ=f(scp). Затем происходит сравнение коэффициента сцепления с коэффициентом поперечной устойчивости транспортного средства.
В том случае, если ϕ<η, тогда при повороте существует вероятность нарушения курсовой устойчивости, проявляющегося в виде заноса. Если ϕ>η, то при повороте существует вероятность нарушения поперечной устойчивости, проявляющегося в виде опрокидывания транспортного средства.
Вместе с тем в устройстве 13 на основании поступающего со стороны датчика 7 сигнала о значении угла поворота продольной оси 5 и информации о среднем угле поворота управляемых колес, поступающей из устройства 1, производится определение и сравнение теоретического расчетного значения угла поворота продольной оси автомобиля, соответствующего углу поворота управляемых колес при нейтральной поворачиваемости автомобиля, с действительным значением. По результатам сравнения расчетного и действительного значений углов поворота продольной оси автомобиля формируется вывод о типе поворачиваемости автомобиля и производится корректировка расчетного значения радиуса его поворота. Информация об откорректированном значении радиуса поворота транспортного средства из устройства 13 поступает в устройство 1, где происходит определение значение критических скоростей по заносу и опрокидыванию с учетом типа поворачиваемости транспортного средства.
Если при повороте транспортного средства может наступить занос, то в устройстве 1 происходит определение критической скорости по заносу
Если при повороте транспортного средства может наступить опрокидывание, то в устройстве 1 происходит определение критической скорости по опрокидыванию
Одновременно с радара 11 значение абсолютной (реальной) линейной скорости ведущих колес νкi (м/с) поступает в сумматор 12, где происходит определение среднего значения абсолютных линейных скоростей ведущих колес  Далее в устройстве 1 происходит сравнение реальной скорости транспортного средства по средней линейной скорости колес νcp с критической νкp.
Далее в устройстве 1 происходит сравнение реальной скорости транспортного средства по средней линейной скорости колес νcp с критической νкp.
В том случае, если реальная скорость транспортного средства достигает значения νcp=0,85νкp, устройство 8 выдает звуковой и световой сигнал водителю о приближении значения скорости движения транспортного средства к значению критической скорости. Если скорость транспортного средства продолжает расти и становится равной 0,9νкp, то устройство 1 подает сигнал на рассогласователь 2.
Рассогласователь 2 разрывает связь между датчиком 3 положения педали подачи топлива и электронным блоком 4 управления впрыском и выдает сигнал, эквивалентный сигналу датчика 3 положения педали подачи топлива. Кроме того, на рассогласователь 2 поступают: сигнал с сумматора 12 о мгновенной скорости движения транспортного средства; сигнал с датчика 3 о скорости нажатия на педаль подачи топлива. Если значение мгновенной скорости транспортного средства νcp соответствует значению 0,9νкp, то рассогласователь 2 выдает сигнал, соответствующий малому перемещению педали подачи топлива.
Электронный блок 4 управления впрыском топлива, получая такой сигнал, полностью прекращает выдачу командных импульсов на топливную форсунку, которая при этом прекращает подачу топлива в цилиндры двигателя, обеспечивая тем самым процесс торможения транспортного средства.
В случае необходимости (совершение маневра) при резком нажатии на педаль подачи топлива, что фиксирует датчик 3 скорости нажатия педали подачи топлива, рассогласователь 2 передает прямой сигнал с датчика 3 положения педали подачи топлива, то есть система ограничения максимальной скорости отключается и топливо подается по обычной схеме. Устройство ограничения скорости включается вновь в работу через 30 секунд, то есть за время, необходимое для завершения маневра.
В результате достигается повышение уровня безопасности, унификации, надежности и степени точности определения критической скорости криволинейного движения по заносу и опрокидыванию транспортного средства с любым типом подвески с учетом типа поворачиваемости транспортного средства, поперечного уклона дорожного полотна и поперечного крена кузова.
Изобретение относится к транспортным средствам. Система контроля и ограничения скорости транспортного средства по параметрам курсовой и поперечной устойчивости при криволинейном движении включает систему, прерывающую подачу топлива, состоящую из электронного устройства определения критической скорости транспортного средства. Дополнительно система содержит установленный на кузове гироскопический датчик, определяющий угол поворота продольной оси транспортного средства относительно прямолинейного движения и угол поперечного наклона кузова относительно нормали, и электронное устройство сравнения теоретического расчетного значения углов поворота продольной оси автомобиля, соответствующего углу поворота управляемых колес при нейтральной поворачиваемости автомобиля, с действительным значением. Повышается безопасность. 2 ил.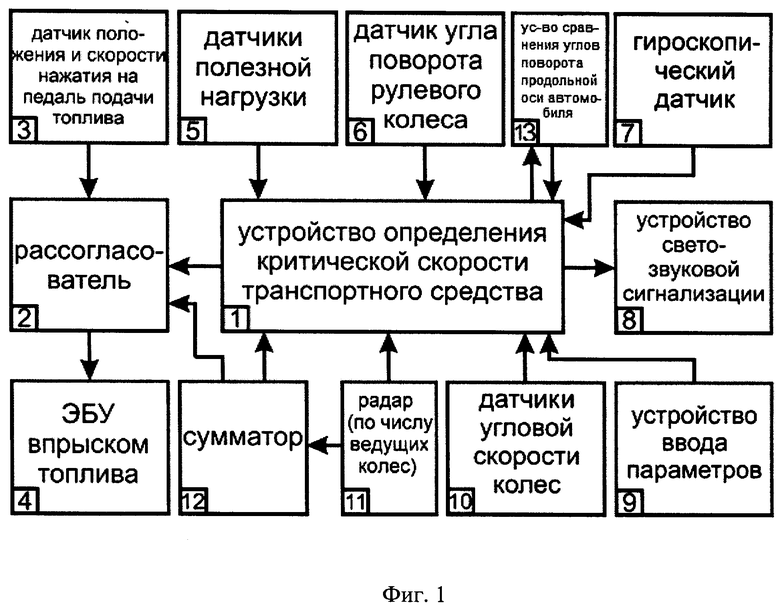
Система контроля и ограничения скорости транспортного средства по параметрам курсовой и поперечной устойчивости при криволинейном движении, включающая систему, прерывающую подачу топлива, состоящую из электронного устройства определения критической скорости транспортного средства и связанных с ним рассогласователя, разрывающего связь между датчиком положения педали подачи топлива и электронным блоком управления впрыском при достижении действительной скорости транспортного средства, равной критической, тем самым ограничивая скорость транспортного средства, датчики, фиксирующие усредненную полезную нагрузку и определяющие вертикальную координату центра масс, датчик, установленный на валу рулевого механизма, фиксирующий угол поворота руля, устройство светозвуковой сигнализации, расположенное на панели приборов, заблаговременно предупреждающее водителя о приближении действительной скорости к критической, устройство ввода параметров технической характеристики транспортного средства, датчик угловой скорости ведущих колес, радар, установленный над ведущим колесом и определяющий абсолютную линейную скорость этого колеса, сумматор, определяющий среднее значение линейной скорости колес, при этом датчик угловой скорости ведущих колес установлен на каждом ведущем колесе, радар установлен над каждым ведущим колесом, а датчики, фиксирующие усредненную полезную нагрузку, определяют значение угла крена кузова по величинам изменения вертикальных и горизонтальных координат центра масс, отличающаяся тем, что дополнительно содержит установленный на кузове гироскопический датчик, определяющий угол поворота продольной оси транспортного средства относительно прямолинейного движения и угол поперечного наклона кузова относительно нормали, и электронное устройство сравнения теоретического расчетного значения углов поворота продольной оси автомобиля, соответствующего углу поворота управляемых колес при нейтральной поворачиваемости автомобиля, с действительным значением.
| 0 |
|
SU157919A1 | |
| УНИВЕРСАЛЬНЫЙ ТОПОПРИВЯЗЧИК (УТП) НА БАЗЕ ЛЕГКОВОГО ТРАНСПОРТНОГО СРЕДСТВА ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2009 |
|
RU2413637C1 |
| US 11046305 B2, 29.06.2021 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ СКОРОСТИ ДРИФТА КОЛЕС АВТОМОБИЛЯ | 2018 |
|
RU2717121C2 |
| US 20190317516 A1, 17.10.2019 | |||
| US 11318950 B2, 03.05.2022 | |||
| НАВИГАЦИОННОЕ УСТРОЙСТВО, СПОСОБ УПРАВЛЕНИЯ РАБОТОЙ И МОБИЛЬНОЕ ОКОНЕЧНОЕ УСТРОЙСТВО | 2010 |
|
RU2526470C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УКЛОНОВ ПРОФИЛЯ ПОВЕРХНОСТИ АЭРОДРОМНЫХ ПОКРЫТИЙ | 2015 |
|
RU2592930C1 |

