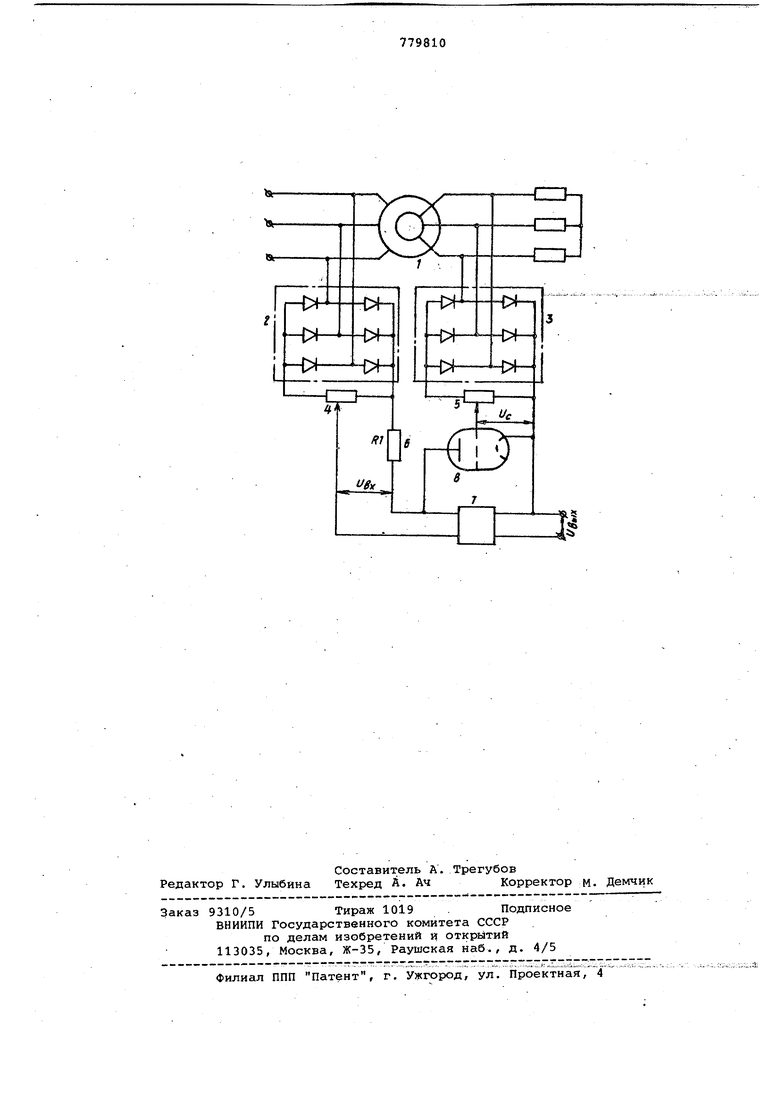
5, служсццие для настройки системы. К резистору 4 через резистор 6 подключен операционный усилитель 7. В цепь обратной связи этого усилителя включен триод 8, Сетка триода 8 под ключена к резистору 5. Принцип работы датчика заключает. ся в следующем. При снижении напряжения на стато асинхронного двигателя 1 пропорционально меняются, напряжения Ug - н резисторе 4 и DC - на резисторе 5. Уменьшение сеточного напряжен.ия триода 8 приводит к уменьшению тока анодной цепи триода 8 и увеличению его внутреннего сопротивления R. Так как передаточная функция операционного усилителя 7 имеет вид U6bi(P) . 2(Р . где 2 (Р); 2 операторные со противления входной цепи и цепи обратной связи; R - сопротивление резистора б; -внутреннее сопротивлениетриода 8; -входное напряжение операционного усилите ля 7; выходное напря жение операцио ного усилителя то из него следует, что 1 - - I. бЫх R JBX И, следовательно, выходное напряже.ние операционного усилителя 7 останется неизменным. При изменении частоты вращения асинхронного двигателя 1 изменяется напряжение на сетке триода 8 где Kg - коэффициент передачи выпрямительного моста 3; и. - напряжение на кольцах ротора неподвижного асинхронного двигателя 1; S - скольжение; а значит, пропорционально меняется сопротивление R и выходное напряжение операционного усилителя 7. Использование операционного усилителя с резистором во входной цепи и триодом в цепи обратной связи позволяет отказаться от вращающихся машин - тахогенератора и микродвигателя, что значительно повышает надежность датчика, а также позволяет многократно увеличить коэффициент передачи датчика, а следовательно, повысить точность измерения. Формула изобретения Датчик частоты вращения асин.хррнного двигателя, содержащий два выпрямительных моста, подключенных соответственно к статорным и роторным обмоткам двигателя, о т л и чающийся тем, что, с целью повышения надежности и точности измерения, в него введен операционный усилитель, с резистором во входной цепи и триодом в цепи обратной связи, при этом резистор входной цепи операционного усилителя соединен с выходом выпрямительного моста, подключенного к статорной рбмотке двигателя, анод и катод триода соединены соответственно с входом и выходом операционного усилителя, а сетка триода соединена с выходом выпрямительного моста, подключенного к роторной обмотке двигателя. Источники информации, принятые во внимание при экспертизе 1.Танатар Л, И. Элементы промышленной автоматики и их динамические свойства . Киев, ТехникаУ 1975, с.133,140. 2.Авторское свидетельство СССР № 5700839,. кл. G 01 Р 3/00, 1977 (прототип).
CZH
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления асинхронным электроприводом | 1979 |
|
SU860251A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1758823A1 |
| Устройство для измерения скольженияАСиНХРОННОгО дВигАТЕля C фАзНыМ POTOPOM | 1979 |
|
SU824056A1 |
| Электропривод | 1985 |
|
SU1309244A1 |
| Устройство для измерения скольженияАСиНХРОННОгО дВигАТЕля | 1979 |
|
SU800881A1 |
| Устройство управления процессом перемешивания | 1989 |
|
SU1738676A1 |
| Устройство для измерения крутящего момента на валу асинхронного электродвигателя | 1987 |
|
SU1580187A1 |
| Нагрузочное устройство | 1980 |
|
SU892367A1 |
| Трехфазное реле тока | 1980 |
|
SU960993A1 |
| СИГНАЛИЗАТОР ДОСТИЖЕНИЯ ЗАДАННОЙ СКОРОСТИ | 2000 |
|
RU2177158C1 |