I Изобретение относится к измерительной технике и может быть исполь зовано для осуществления обратной связи по скорости в приводах с асин хронным двигателем с фазным ротором Известны устройства для измерения скольжения асинхронного двигателя с фазным ротором, содержгицие датчики тока ротора и статора, выходы которых через выпрямители и резис торы подключены последовательно с источником постоянного напряжения к измерительному прибору . Недостатком этих устройств является низкая точность при широких пределах изменения напряжения на ста торной обмотке и величины скольжения. Известно также устройство для измерения скольжения асинхронного двигателя с фазным ротором, содержащее два трехфазных выпрямителя, резистор двигатель постоянного тока и соединенный с валом последнего тахогенератор, причем обмотка якоря двигате.ля постоянного ±ока через один выпря митель подключена к кольцам фазного ротора асинхронного двигателя, а об мотка возбуждения его через резистор и второй выпрямитель подключена к статорной цепи асинхронного двигателя 2. . Недостатком этого устройства является конструктивная сложность и низкая точность при широких пределах изменения напряжения статорной обмотки и величины скольжения. Наиболее близким к предлагаемому по технической сущности является устройство для измерения скольжения асинхронного двигателя с фазным ро- . тором, содержащее датчик тока ротора, датчик электрических параметров статорной (датчик напряжения), включенный на выходе устройства блок деления и два усилителя-преобразователя, состоящих из последовательно соединённых фильтра нижних частот, выпрямителя и второго фильтра нижних частот, причем один усилитель-преобразователь включен между датчиком тока ротора и первым входом блока деления, а другой - между датчиком напряжения статора и вторым входсж блока деления f3}. Недостатком зтого устройства является низкая точность при щироких пределах изменения величины скольжения, особенно при малых величинах сопротивлений в роторной цепи и при
зменении этих сопротивлений, при коором использование этого устройства тановится практически невозможным вследствие существенного снижения точности.
Цель изобретения - повышение точности измерения скольжения.
Эта цель достигается тем, что в устройетво для измерения скольжения асинхронного двигателя с фазным ротором, содержащем резисторы в цепи ротора« датчик тока роторной обмотки, датчик электрических параметров статорной обмотки и включенный на выходе устройства блок деления, датчик электрических параметров статорной обмотки выполнен в виде датчикатока и дополнительно введены датчик напряжения, блок суммирования и блок извлечения корня квадратного из суммы квадратов входных сигналов, вход датчика напряжения подключенк резистору в цепи ротора, выход его- к входу блока cy пvIИpoвaния, ко входам блока суммирования и блока извлечения корня подключен выход датчика тока роторной о&мотки, ко второму входу блока извлечения корня подключен датчик электрических параметров статорной обмотки, а выходы блока суммирования и блока извлечения корня подключены ко входам блока деления .
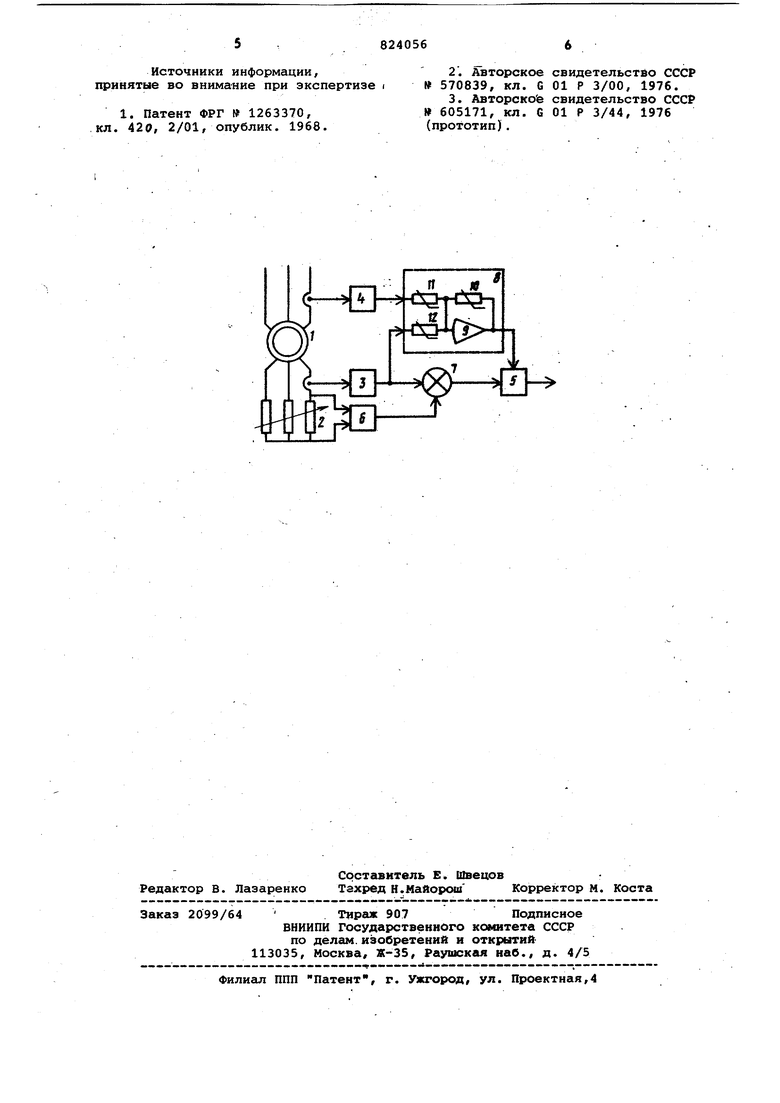
На чертехсе приведена схема предлагаемого устройства.
Устройство для измерения скольжения асинхронного двигателя 1 с фазным ротором, в цепи которого включены дополнительные переменные резисторы 2, содержит датчик 3 тока роторной обмотки, датчик 4 электрически:: параметров статорной обмотки, выполненный в виде датчика тока,включенный на выходе устройства блок 5 деления, датчик б напряжения на дополнительных переменных резисторах 2 в цепи ротора, блок 7 суммирования и блок 8 извлечения корня квадратного из суммы квадратов входных сигналов, причем два входа последнего подключены к датчикам тока статорной 4 и роторной 3 обмоток, а его выход соединен со входом делителя блока 5 деления, вход делимого которого соединен с выходом блока 7 суммирования, два входа которого подключены к датчику 3 тока роторной обмотки и к датчику б напряжения на дополнительных переменных резисторах 2 в цепи ротора. Блок 8 извлечения корня квадратного из суммы квадратов входкых сигналов может бытьвыполнен, например, в виде операционного усилителя 9, в цепи обратной связи и на входах которого подключены нелинейные резисторы с квадратичной харак теристикой (например, карборундовые резистора) 10-12.
Работает устройство следующим образом.
Выходные сигналы датчика 3 тока . 3 роторной обмотки и датчика 4 тока 3 статорной обмотки поступают на входы блока 8 извлечения корня квадратного из суммы квадратов входных сигналов, в результате чего на выходе последнего сигнал пропорционален величине
/
ЛГ
-(i)(-).
0 где х и X - приведенное к статор ной обмотке индуктивное фазное сопротивление роторной обмотки и индуктивное сопротивление цепи намагничивания.
После сложения выходных сигналов датчика 3 тока 3, роторной обмотки и датчика б напряжения на дополнительных переменных резисторах 2 в цепи ротора на выходе блока 7 суммирования формируется сигнал, пропорциональный величине
,).
где R
лп приведенное к статорной обмотке постоянное фазное активное сопротивление
роторной обмотки. Этот сигнал делится на выходной сигнал блока 8 и на выходе блока 5 деления формируется сигнал,пропорциоНсщьный скольжению асинхронного двигателя с фазным ротором
5
VlP)(iJf
формула изобретения
Устройство для измерения скольжения асинхронного двигателя с фазным ротором, содержащее резисторы в цепи ротора, датчик тока роторной обмотки, датчик электрических параметров статорной обмотки и блок деления, отличающееся тем, что, с целью повышения точности измерения j датчик электрических параметров статорной обмотки выполнен в виде датчика тока и в устройство введены датчик напряжения, блок суммирования и блок извлечения корня квадратного из суммы квадратов
5 входных сигналов, при этом вход датчика напряжения подключен к резистору в цепи ротора, выход его - к входу блока суммирования, ко входам блока суммирования и блока извлечения корня подключен выход датчика тока роторной обкютки, ко второму входу блока извлечения корня подключен датчик эле)(трич€ских па аметров статорной обмотки, а выходы блока суммирования н блока извлечения корня
подключены ко входам блока деления.
Источники информации, принятые во внимание при экспертизе i
1. Патент ФРГ № 1263370, кл. 420, 2/01, опублик. 1968.
свидетельство СССР 01 Р 3/00, 1976.
свидетельство СССР 01 Р 3/44, 1976 
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения скольженияАСиНХРОННОгО дВигАТЕля C фАзНыМ POTOPOM | 1979 |
|
SU838563A1 |
| Устройство для управления асинхронным электроприводом | 1979 |
|
SU860251A1 |
| Устройство для измерения скольженияАСиНХРОННОгО дВигАТЕля | 1979 |
|
SU800881A1 |
| Устройство для определения момента асинхронного электродвигателя | 1979 |
|
SU864029A1 |
| Устройство для определения моментаАСиНХРОННОгО элЕКТРОдВигАТЕля | 1979 |
|
SU817496A1 |
| Устройство для управления асинхроннымдВигАТЕлЕМ C фАзНыМ POTOPOM | 1979 |
|
SU851713A1 |
| Способ управления асинхронным двигателем с фазным ротором | 1986 |
|
SU1381679A1 |
| Способ управления асинхронным двигателем с фазным ротором | 1987 |
|
SU1408516A1 |
| СПОСОБ ОЦЕНИВАНИЯ МАССЫ ПОЛЕЗНОГО ГРУЗА, ПОДНИМАЕМОГО ГРУЗОПОДЪЕМНОЙ УСТАНОВКОЙ, ПРИВОДИМОЙ АСИНХРОННЫМ ДВИГАТЕЛЕМ С ФАЗНЫМ РОТОРОМ, И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2306535C1 |
| Устройство для пуска асинхронного двигателя с фазным ротором | 1985 |
|
SU1272454A1 |
