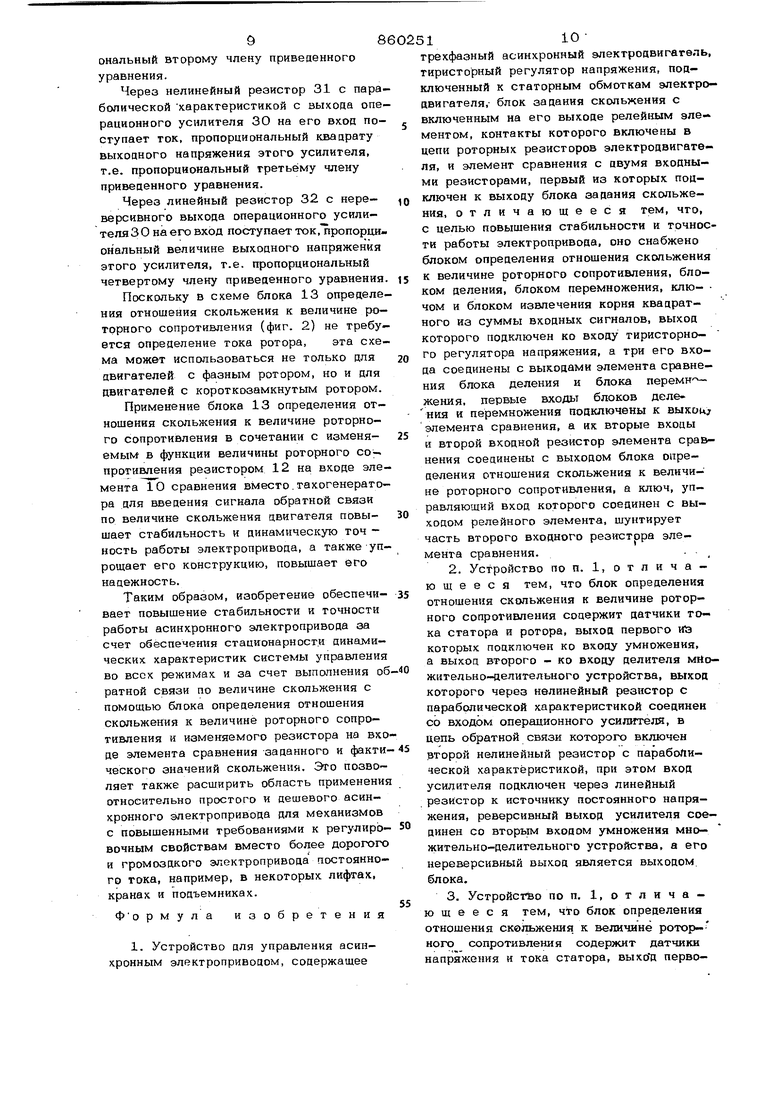
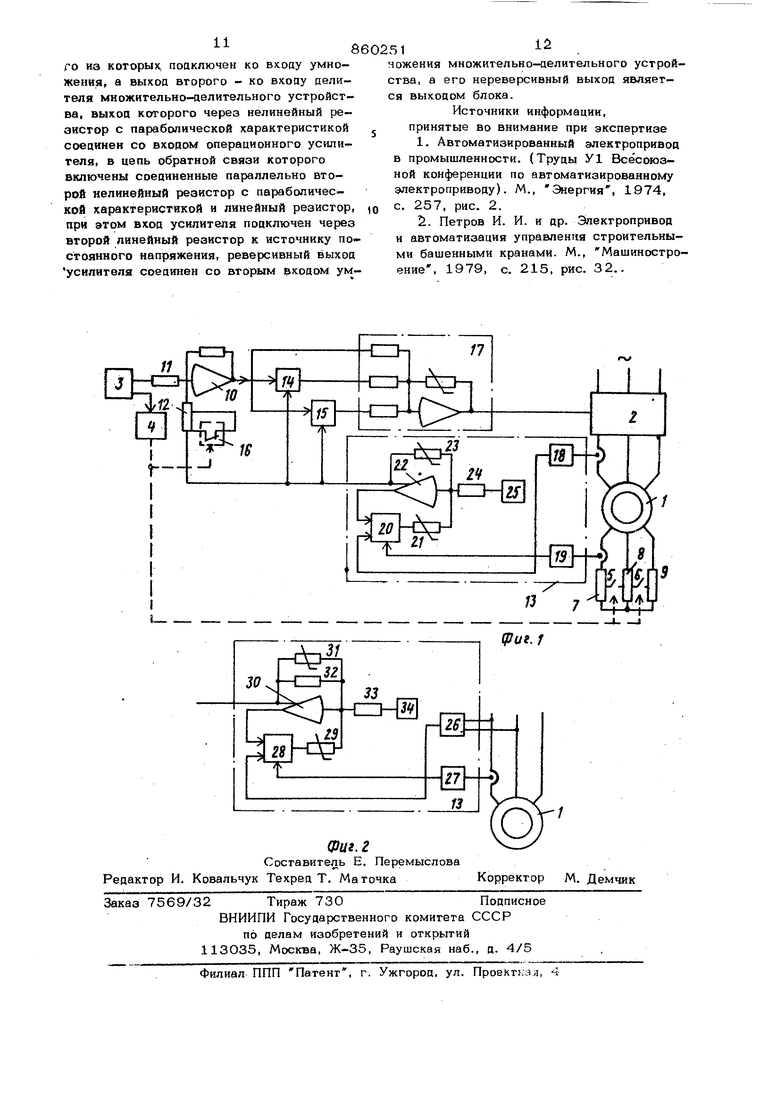
(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ Т1зобрегение относится к электротехнике, а именно к. управлению электропривоцами с асинхронными двигатепяи, и может применяться в электроприводах подъемнотранспортнык машин. Известно устройство цля управления асинхронным электроприводом, содержащее трехфазный асинхронный электродвигатель, подключенный к статору двигателя тиристорный регулятор напряжения с блоком управления, вход которого соединен с выходом установленного на валу двигателя тахргенератора 11. . Недостаток этой системы - нестабильность динамических характеристик и ограниченная точность работы вследствие нестационарности характеристик двигателя во время переходных процессов. Наиболее близким к предлагаемому по технической сущности и достигаемому результату является устройство для управления асинхронным электроприводом, содержащее трехфазный асинхронный электро двигатель, подключенный к статорным обмоткам электродвигателя, тиристорный регулятор напряжения, блок зацания скорости (скольжения) с включенным на его выходе релейным элементом, контакты которого включены в цепи роторных резисторов электродвигателя, элемент сравнения с двумя входными резисторными цепями, первая из которых подключена к выходу блока задания скольжения, а втораяк выходу установленного на валу двигателя тахогенератора, выход элемента сравнения подключен ко входу тиристорного регулятора напряжения 2}. Недостаток этого устройства - нестабильность и низкая динамическая точность работы электропривода, определяемые нестационарностью характеристик двигателя во время переходных процессов и пульсацией выходного напряжения тахогенератора, которые могут приводить к неустойчивой работе электропривода. Цель изобретения - повышение стабильности и точности работы электропривопв. 38 Эга цель аосги1 ается тем, что устройство для управления асинхронным электроприводом, содержащее трехфазный асинхронный электродвигатель, тиристорный регулятор напряжения, подключенный к статорным обмоткам электродвигателя, блок задания скольжения с включенным на его выходе релейным элементом, контакты которого включены в цепи роторных регистров двигателя, и элемент сравнения с двумя входными резисторами, первый из которых подключен к выходу бло ка задания скольжения, снабжена блоком определения отношения скольжения к величине роторного сопротивления, блоком деления, блоком перемножения, ключом и блоком извлечения корня квадратного из суммы входных сигналов, выход которого подключен ко входу тиристорного регулятора напряжения,. а три его входа соеди- нены с выходами элемента сравнения, блока деления и блока перемножения, первые входы блоков деления и перемножения под ключены к выходу элемента сравнения, а их вторые входы и второй входной резис- хор элемента сравнения соединены с выходом блока определения отношения сколь жения к величине роторного сопротивления, а ключ, управл5поший вход которого соединен с выходом укаачнного выше релейпого элемента, шунтирует часть второ го входного резистора элемента сравнения Кроме того, блок определения отношения скольжения к величине роторного сопротивления содержит датчики тока статора и ротора, выход первого из которых подключен ко входу умножения, а ВЕ)1ход второго - ко Входу делителя множительно-де лительного устройства, ВЕЛХОД которого . через нелинейный резистор с параболичес кой характеристикой соединен со входом операционного усилителя, в цепь обратной связи которого включен второй нелинейный резистор с параболической характеристикой, при этом вход усилителя подключен через линейный резистор к источнику постоянного напряжения, реверсивны выход усилителя соединен со вторым входом умножения множительно-делительного устройства, а его нереверсивный выход является выходом блока. Блок определения отношения скольжения к величине роторного сопротивления содержит датчики напряжения и тока статора, выход первого из которых подклю чен ко входу умножения, а выход второго - ко входу делителя множигельно-делительного устройства, выход которого через нелинейный резистор с параболичес- 1.4 кой характеристикой соединен со входом операционного усилителя, в цепь обратной связи которого включены соединенньш па раллельно второй йелинейный резистор с параболической характеристикой и линейный резистор, при этом вход усилителя подключен через второй линейный резистор к источнику постоянного напряжения / реверсивный выход усилителя соединен со вторым входом умножения множительноделительного устройства, а его нереверсивный выход является выходом блока. На фиг. 1 приведена схема устройства для управления асинхронным электроприводом; на фиг. 2 - вариант выполнения блока определения отношения скольжения к величине роторного сопротивления. Система управления асинхронным электроприводом содержит подключенный к статору двигателя 1 тиристорный регулятор 2 напряжения, блок 3 задания скольжения с включенным на его выходе релейным элементом 4, контакты 5 и 6 которого включены в цепи роторных резисторов 7-9 двигателя 1, и элемент 10 сравнения с двумя входными резисторами 11 и 12, первый из которых (11) подключен к выходу блока 3 задания скагьжения. Система управления асинхронным электроприводом снабжена блоком 13 определения отношения скольжения к величине роторного сопротивления двигателя, блоком 14 деления, блоком 15 перемножения, ключом 16 и блоком 17 извлечения корня квадратного из суммы входных сигналов, выход которого подключен ко входу тиристорного регулятора 2 напряжения, а три его входа соединены с вь ходами элемента 10 сравнения блока 14 деления и блока 15 перемножения, первые входы блоков 14 деления и перемножения 15 подключены к выходу элемента 10 сравнения, а их вторые входы и второй входной резистор 12 элемента 10 сравнения соединены с выходом блока 13 определения отношения скольжения к величине роторного сопротивления, а ключ 16, управляющий вход которого соединен с выходом указанного выше релейного элемента 4, шунтирует часть второго входного резистора 12 элемента Ю сравнения. Блок 13 определения отношения скольжения к величине роторного сопротивления содержит датчики тока статора 18 и ротора 19, выход первого из которых (18) подключен ко входу умножения, а выход второго (19) - ко входу делителя множительно-делител -.ного устройства 2О, выходом через нелинейный резистор 21 с параболической характеристикой соедЫ- ненный со входом операционного усилителя 22, в цепь обратной связи которого включен второй нелинейный резистор 23 с параболической характеристикой, при этом вхоа усилителя 22 подключен через линейный резистор 24 к источнику 25 по стоянного напряжения, реверсивный выход усилителя 22 соединен со вторым входом умножения множительно-делительного уст ройства 20, а его нереверсивный выход является выходом блока 13. Блок 13 определения отношения сколь жения к величине роторного сопротивления {фиг. 2) содержит датчики напряжения 26 и тока 27 статора, выход первого из которых (26) подключен ко входу умножения, а второго (27) - ко входу де лителя множительно-делительного устройства 28, выходом через нелинейный резистор 29 с параболической характеристикой соединенный со входом операционного усилителя ЗО, в цепь обратной связи которого включены соединенные параллельно второй нелинейный резистор 31 с параболической характеристикой и линейный резистор 32, при этом вход усилителя 30 подключен через второй линейный резистор 33 к источнику 34 постоянного напряжения, реверсивный выход усилителя 30 соединен со вторым входом умножения множительно-делительного устройства 28, а его нереверсивный выход является выходом блока 13. Устройство работает следующим образом. На вход тиристорного регулятора 2 на пряжения подается напряжение (Jax ру, выхода блока 17 извлечения корня квадратного иа суммы входных сигналов, которЬ1й может быть выполнен, например в виде операционного усилителя с включенным в цепи его обратной связи нелинейным, резистором с параболической характеристикой. При этом на входы ука- занного блока подается напряжение (. с выхода элемента 10 сравнения непосред ственно и через блоки деления 14 и перемножения 15, на вторые входы которых поступает выходной сигнал блока 13 определения отношения скольжения 5 к вели чине роторного сопротивления 2 двигателя 1, т.е. сигнал, пропорциональный величине QlRa. Выбором входных сопротивлений блока 17 извлечения корня квадратного из суммы входных сигналов при этом обеспечивается формирование на входе ти516ристорного регулятора 2 напряжения,пропорционального величине вх .иэсК- -р кгО эс - 5 АХ R2 Ч / где RJ - активное фазное сопротивление статора двигателя; .) /V . хгХх ч 7 -R К 1 Х )д X.- реактивные фазные сопротивления статора, ротора и цепи намагничивания двигателя; коэффициент пропорциональности. Учитывая, что фазное напряжение статора двигателя U( пропорционально входному напряжению UBXTOH P °P ° ° регулятора напряжения 2 где коэффициент усиления тиристор. ного регу/тятора напряжения 2, а момент двигателя Л определяется следующей зависимостью от фазного напряжения и параметров двигателя (-lj-T гце Шх.. - синхронная скорость двигателя, из приведенных выражений можно определить, что при предлагаемом выполнении системы управления момент управления двигателя пропорционален выходному напряжению элемента 10 сравнения А.-KiUac ЦуЛ) коэффициент пропорциональности. Выходной сигнал блока 13 определея отношения S/R скольжения к велине роторного сопротивления поступает вход элемента 1О сравнения через рестор 12, выбором величины которого еспечивается умножение этого сигнала величину фазного сопротивления ротодвигателя R, благодаря чему через зистор 12 на вход элемента 10 сравния поступает сигнал, пропорциональй скольжению двигателя .5. Если с по- ощью релейного элемента 4 и его конктов 5 и 6 изменяется величина фазносопротивления ротора двигателя, то одновременно с помощью ключа 16 изме няется величина сопротивления 12 на входе элемента Ю сравнения, в результате чего при любой величине фазного роторного сопротивления двигателя обес- печивается поступление на вход элемента 10 сравнения сигнала, пропорционального скольжению двигателя. Одновременно на вход элемента 1О сравнения через резистор 11с выхода бло ка 3 задания сколь кения поступает сигнал, пропорниональный зацаиной величине скольжения на выхоае элемента Ю сравнения напряжение пропорционально р ности заданной и фактической величин скольжения ),. где Кдс- коэффициент пропорциональнос При таком построении системы управлени движение двигателя описывается линейны дифференциальным уравнением т.е. обеспечивается стабильность цинамических характеристик алекгроприаода независимо от величины аацанного скольже ния и -от- режима управления, что обеспечи вает стабильность и устойчивость работы электропривода и требуемую динамическу точность его работы во всех режимах. Блок 13 определения отношения сколь жения к величине роторного сопротивления (фиг. 1) обеспечивает вычисление ве личины Bffii путем решения уравнения 12токи статора и ротора двигателя. Получение на пыходе, операщ1онного усилителя 22 напряжения, пропорционального величине S/R вытекает из равенст«. ва нулю суммы токов в узле на входе этого усилителя. G выхода источника 23 постоянного напряжения через линейный резистор 24 на вход операционнсуго усилителя 22 пост пает ток, пропорциональный первому члену приведенного уравнения. Ьыходное напряжение операционного усилителя 22 с помощью множительно-целительного устройства 2О умножается на вь1ходной сигнал датчика 18 тока 1 статора и делится на выходной сигнал датчика 19 тока Xg. ротора, а благодаря параболической характеристике нелинейного резистора 21 с выхода множительно-делительного устройства 2О на вход операционного усилителя 22 через этот нелинейный резистор 21 поступает ток, пропорциональный квадрату выходного сигнала множительно-аелительного устройства 2О, т. е. пропорциональный второму члену приведенного уравнения. Через нелинейный резистор 23 с параболической характеристикой с выхода операционного усилителя 22 на его вход поступает ток, пропорциональный квадрату выходного напряжения этого усилителя. т.е. пропорциональный третьему члену пои веденного уравнения. Использование реверсивного и нереверсивного выходов операционного усилителя 22 позволяет обеспечить требуемые знаки сигналов,без применения дополнительных инверторов знака. Схема варианта выполийния блока 13 определения отношения скольжения к величине роторного сопротк л: -П1я (фиг. 2) обеспечивает вычисление величины S/Rg путем решения уравнения l-fUl- rVa JVR I KJ V , X7iX rtie U - напряжение статора двигателя. С выхода источника 34 постоянного напряжения через линейный резистор 33 на вход операционного усилителя 30 поступает ток, пропорциональный первому лену приведенного уравнения. Выходное апряжение операционного усилителя с го реверсивного выхода с помощью мноительно-делительного устройства 28 уможается на выходной сигнал датчика 26 апряжения U статора и делится на выодной сигнал датчика. 27 тока Т статоа, а благодаря параболической характеистике нелинейного резистора 29 с выода множительно-пелитсльного устройста 28 на вход операционного усилителя 0 через этот нелинейный резистор 29 оступает- ток, пропорциональный квадрау выходного сиг-нала множительно-деительксго устройсгвй 2Я ,- е. :--;: опорциональный второму члену привеценного уравнения. Через нелинейный резистор 31 с пара болической характеристикой с выхода опе рационного усилителя ЗО на его вхоц поступает ток, пропорциональный квадрату выходного напряжения этого усилителя, т.е. пропорциональный третьему члену привеценного уравнения. Через линейный резистор 32 с нереверсивного выхода операционного усилителя 30 на его вход поступает ток,пропорциональный величине выходного напряжения этого усилителя, т.е. пропорциональный четвертому члену приведенного уравнения Поскольку в схеме блока 13 определе ния отношения скольжения к величине роторного сопротивления (фиг. 2) не требуется определение тока ротора, эта схема может использоваться не только для двигателей с фазным ротором, но и для двигателей с короткозамкнутым ротором. Применение блока 13 определения отношения скольжения к величине роторного сопротивления в сочетании с изменяемым в функции величины роторного со- противления резистором 12 на входе элемента 10 сравнения вМесто.тахогенератора для введения сигнала обратной связи по величине скольжения двигателя повышает стабильность и динамическую точ кость работы электропривода, а также упрощает его конструкцию, повышает его надежность. Таким образом, изобретение обеспечивает повышение стабильности и точности работы асинхронного электропривода за счет обеспечения стационарности динамических характеристик системы управления во всех режимах и за счет выполнения об ратной связи по величине скольжения с помощью блока определения отношения скольжения к величине роторного сопротивления и изменяемого резистора на вхо де элемента сравнения заданного и фактического значений скольжения. Это позволяет также расширить область применения относительно простого и дешевого асинхронного электропривода для механизмов с повышенными требованиями к регулирЬвочным свойствам вместо более дорогого и громоздкого электропривода постоянного тока, например, в некоторых лифтах, кранах и подъемниках. Фо рмула изобретения 1. Устройство для управления асинхронным электроприводом, содержащее 8 5110трехфазный асинхронный электродвигатель, тиристорный регулятор напряжения, подключенный к статорным обмоткам электродвигателя,- блок задания скольжения с включенным на его выходе релейным эле-, ментом, контакты которого включены в цепи роторных резисторов электродвигателя, и элемент сравнения с двумя входными резисторами, первый из которых подключен к выходу блока задания скольжения, отличающееся тем, что, с целью повышения стабильности и точности работы электропривода, оно снабжено блоком определения отношения скольжения к величине роторного сопротивления, блоком деления, блоком перемножения, клю- чом и блоком извлечения корня квадратного из суммы входных сигналов, выход которого подключен ко входу тиристорно- го регулятора напряжения, а три его входа соединены с выходами элемента сравнения блока деления и блока перемн- жения, первые входы блоков дсления и перемножения подключены к выхок элемента сравнения, а их вторые входы и второй входной резистор элемента сравнения соединены с выходом блока определения отношения скольжения к величи- не роторного сопротивления, а ключ, управляющий вход которого соединен с выходом релейного элемента, шунтирует часть второго входного резистора элемента сравнения. 2. Устройство по п. 1, отличающееся тем, что блок определения отношения скольжения к величине роторного сопротивления содержит датчики тока статора и ротора, выход первого которых подключен ко входу умножения, а выход второго - ко входу делителя мйожительно-делительного устройства, выход которого через нелинейный резистор с параболической характеристикой соединен со входом операционного усилителя, в цепь обратной связи которого включен второй нелинейный резистор с параболической характеристикой, при этом вход усилителя подключен через линейный резистор к источнику постоянного напряжения, реверсивный выход усилителя соединен со вторым входом умножения множительно-делительного устройства, а его нереверсивный выход является выходом, блока. 3. Устройство по п. 1, отличащееся тем, что блок определения тношения скольжения к величине роторого сопротивления содержит датчики апряжения и тока статора, выход перво-