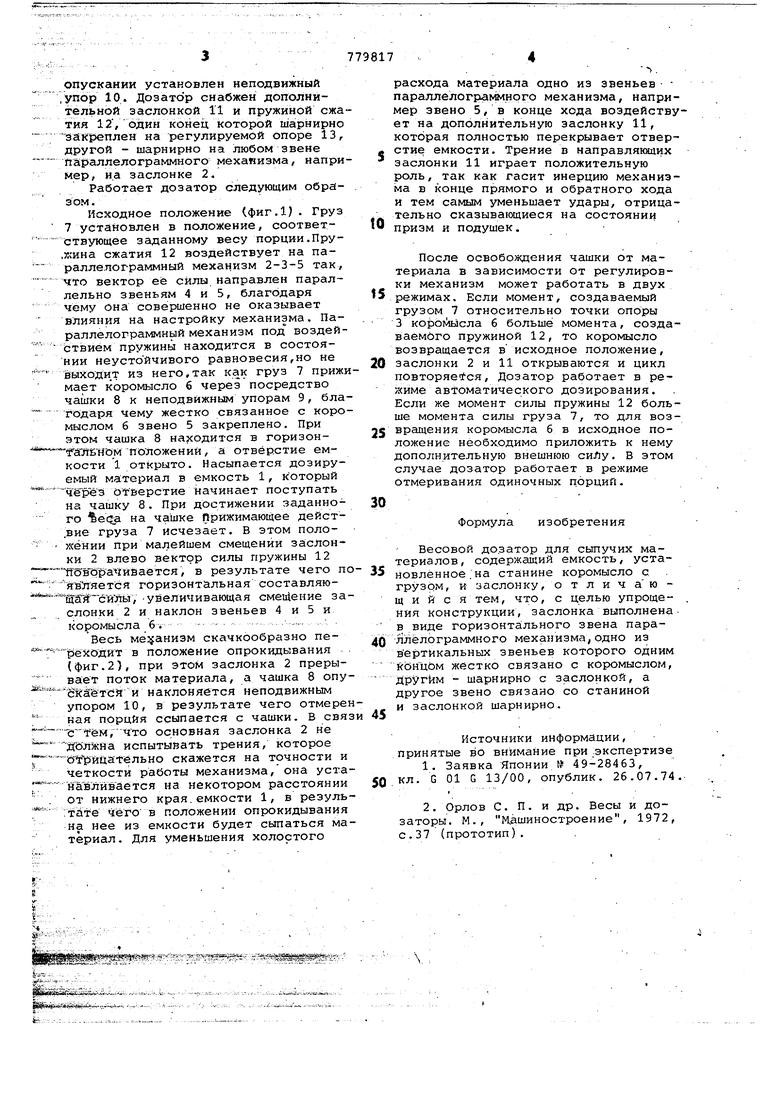
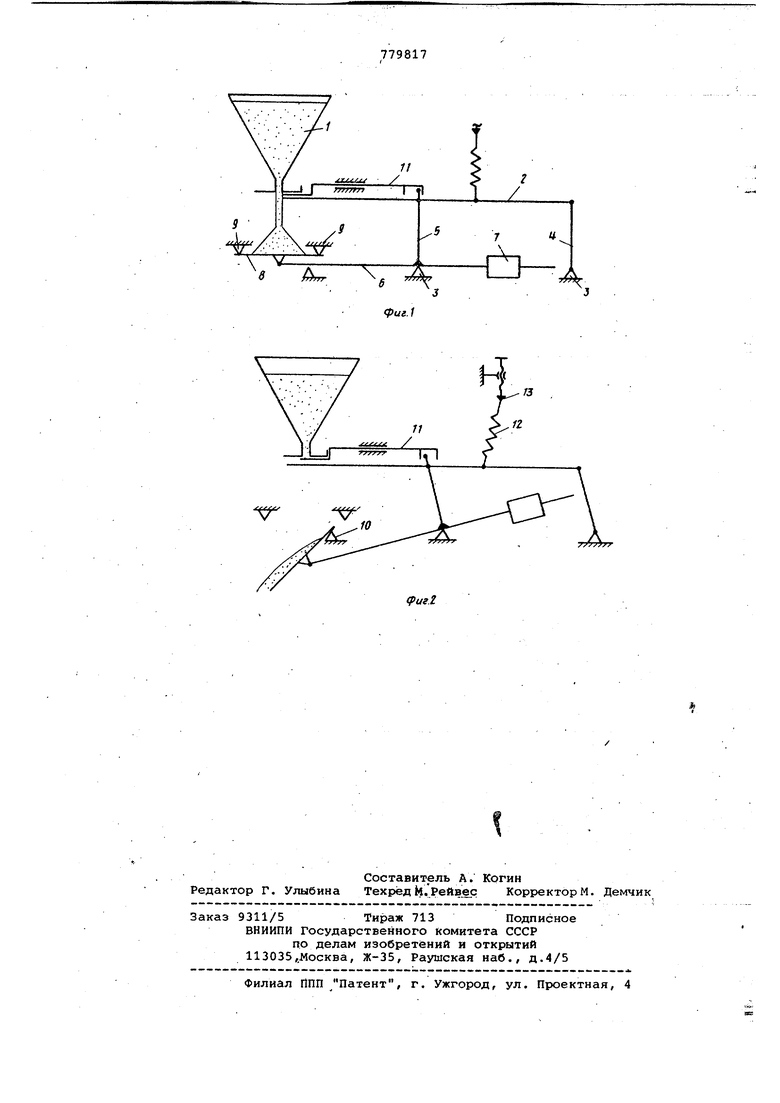
опускании установлен неподвижный ,уп6р 10. Дозатор снабжен дополнительной заслонкой II и пружиной сжа тия 12, один конец которой шарнирно закреплен на регулируемой опоре 13, другой - шарнирно на любом звене Параллелограммного механизма, напри мер, на заслонке 2, Работает дозатор следующим образом. Исходное положение (фиг.1). Груз 7 установлен в положение, соответ ствующее заданному весу порции.Пру.жина сжатия 12 воздействует на па- раллелограммный механизм 2-3-5 так, что вектор её силы направлен параллельно звеньям 4 и 5, благодаря чему она совершенно не оказывает влияния на настройку механизма. Параллелограммный механизм под воздей Ьтвием пружины находится в состоянии неустойчивого равновесия,но не 1выходи т из не го, так как груз 7 прижи мает коромысло 6 через посредство чашки 8 к неподвижным упорам 9, бла годаря чему жёстко связанное с коро мыслом 6 звено 5 закреплено. При этом чашка 8 находится в горизон УаЛШГОМ положений, а отверстие емкости 1 открыто. Насыпается дозируемый материал в емкость 1, который чёрёз Отверстие начинает поступать на чашку 8. При достижении заданного ecja на чашке ррижимающее дейст.вие груза 7 исчезает. В этом поло - «ёнии При малейшем смещении заслонки 2 влево вектор силы пружины 12 йввсзраЧИВается, в результате чего п является горизонтальная составляю Щай силы, -увеличивающая сметЦение за слонки 2 и наклон звеньев 4 и 5 и коромысла 6i -- .-.--,.,.-Весь ме: анизм скачкообразно пе ёходит в положение опрокидывания (фиг.2), при этом заслонка 2 прерыва;ёт поток материала, а чашка 8 опу cftaietdS и наклоняется неподвижным упором 10, в результате чего отмере ная порция ссыпается с чашки. В свя Что основная заслонка 2 не испытывать трения, которое О рйЦательно скажется на точности и четкости работы механизма, она уста навливается на некотором расстоянии от нижнего края.емкости 1, в резуль :тйтё чего в положении опрокидывания на нее из емкости будет сыпаться ма териал . Для уменьшения холостого расхода материала одно из звеньев параллелогр1аммнрго механизма, например звено 5, в конце хода воздействует на дополнительную заслонку 11, которая полностью перекрывает отверстие емкости. Трение в направлякндих заслонки 11 играет положительную роль, так как гасит инерцию механизма в конце прямого и обратного хода и тем самым уменьшает удары, отрицательно сказывающиеся на состоянии призм и подушек. После освобождения чашки от материала в зависимости от регулировки механизм может работать в двух режимах. Если момент, создаваемый грузом 7 относительно точки опоры 3 коройысла 6 больше момента, создаваембго пружиной 12, то коромысло возвращается в исходное положение, заслонки 2 и 11 открываются и цикл повторяемся. Дозатор работает в режиме автоматического дозирования. Если же момент силы пружины 12 больше момента силы груза 7, то для возвращения коромысла 6 в исходное положение необходимо приложить к нему дополнительную внешнюю сиЛу. В этом случае дозатор работает в режиме отмеривания одиночных цорций. Формула изобретения Весовой до.затор для сыпучих материалов, содержащий емкость, установленное.на станине коромысло с грузом, и заслонку, о т л и ч а ю щ и и с я тем, что, с целью упрощения конструкции, заслонка выполнена. в виде горизонтального звена параллёлограммного механизма,одно из вертикальных звеньев которого одним йЬнцЬм жестко связано с коромыслом, другим - шарнирно с заслонкой, а другое звено связано со станиной и заслонкой шарнирно. Источники информации, принятые во внимание при экспертизе 1.Заявка Японии № 49-28463, кл. G 01 G 13/00, опублик. 26.07.74. 2.Орлов С. П. и др. Весы и дозаторы. М., Машиностроение, 1972, с.37 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЕСОВОЙ ДОЗАТОР СЫПУЧИХ МАТЕРИАЛОВ | 2001 |
|
RU2223468C2 |
| Автоматические весы для сыпучих тел | 1934 |
|
SU43497A1 |
| Автоматические весы | 1932 |
|
SU41978A1 |
| ВЕСОВОЙ АВТОМАТИЧЕСКИЙ ДОЗАТОР ГРЕНЫ | 1969 |
|
SU236893A1 |
| Шлифовально-полировальныйСТАНОК | 1979 |
|
SU848302A1 |
| Устройство для дозированного кормления животных | 1983 |
|
SU1109096A1 |
| ОГРАНИЧИТЕЛЬ СКОРОСТИ ДВИЖЕНИЯ ТЕЛА | 2017 |
|
RU2666698C1 |
| ШАРНИРНО-РЫЧАЖНЫЙ МЕХАНИЗМ-ДОЗАТОР | 2007 |
|
RU2343424C1 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ ОСТОВА | 1991 |
|
RU2093371C1 |
| ОГРАНИЧИТЕЛЬ СКОРОСТИ ДВИЖЕНИЯ ТЕЛА | 2017 |
|
RU2675642C1 |
,.
n.jewfe-atir-j-j irB«.,i ijr,«iLx:iio--j..-.
4
13
(риг.г
