Изобретение относится к области транспортного, промышленного, сельскохозяйственного и оборонного машиностроения, а также к строительству. Преимущественная область применения: наземные и надводные объекты, нуждающиеся в стабилизации остова от продольных и поперечных кренов.
Известен навесной механизм трактора, снабженного параллельлограммным устройством для выравнивания на склонах, содержащий шарнирно-рычажную систему, связывающую устройство для выравнивания трактора с ползуном, несущую навесное орудие [1]
Сложность конструкции и недостаточно высокая эффективность стабилизации хода орудия из-за возможности опрокидывания на крутых склонах является существенным недостатком этого механизма.
Известно устройство для обнаружения бокового сноса транспортного средства, содержащего корпус, чувствительные элементы, установленные на подпружиненной поворотной плате с помощью подвески, датчики отклонения поворотной платы и привод вертикального подъема чувствительных элементов, при этом оба чувствительных элемента установлены на концах двух параллельных равноплечих рычагов, в центральной части шарнирно закрепленных на плате [2]
Недостаточно высокая эффективность обнаружения бокового сноса транспортного средства из-за влияния кренов его на величину погрешности в замерах является серьезным недостатком этого устройства.
Наиболее близким аналогом изобретения является устройство стабилизации остова, содержащее взаимодействующее с остовом маятниковое приспособление гравитационного типа, шарнирный параллелограммный механизм с горизонтально-наклонными и вертикально-наклонными звеньями, элементы крепления и успокоитель [3]
Несмотря на ряд достоинств, прототипу присущи серьезные недостатки, в частности:
зависимость допустимых кренов трактора от габаритов параллелограммных механизмов по ширине захвата из-за расположения их с боков остова (увеличение допустимых кренов требует увеличения габаритов трактора по ширине, что увеличивает металлоемкость и вызывает потребность в увеличении как мощности двигателя, так и тягового усилия трактора);
мала скорость стабилизации по причине отставания работы гидроцилиндра от работы маятника, поэтому не исключено опрокидывание транспортного средства на крутых склонах;
не предусмотрена одновременная стабилизация остова от продольных и поперечных кренов, при поворотах и разворотах агрегата может привести к потере управления и опрокидывания;
недопустима работа в условиях захламленности и/или камнепада с вершины горы из-за возможности попадания посторонних предметов (пней, камней, валежника, порубочных остатков и нереализованной низкотоварной древесины) в параллелограммные механизмы и вызванного этим прекращения стабилизации остова;
не исключено воздействие неровностей микрорельефа поверхности почвы на стабилизацию остова, так как мала скорость стабилизации и жестка связь колес с параллелограммным механизмом;
не исключены автоколебания остова при циклических знакопеременных кренах параллелограммного механизма;
сложна конструкция устройства.
Техническим результатом предлагаемого изобретения является повышение допустимых кренов и скорости стабилизации, а также упрощение конструкции.
Данный результат предполагает также обеспечение стабилизации вертикального расположения остова в пространстве при циклических и знакопеременных кренах параллелограммного механизма посредством предотвращения автоколебаний остова.
Кроме того, результат изобретения заключается в обеспечении стабилизации вертикального расположения остова в пространстве посредством уменьшения вредного воздействия неровностей микрорельефа поверхности почвы на перемещение вертикально-наклонных звеньев параллельграммного механизма.
При этом, изобретение предполагает обеспечение работы в условиях захламленности участков посторонними предметами, например древесными остатками или строительным мусором.
Наконец, изобретение позволит обеспечить возможность регулируемого ощущения кренов устройства обслуживающим персоналом.
Указанный технический результат достигается тем, что в устройстве стабилизации остова, содержащем взаимодействующее с остовом маятниковое приспособление гравитационного типа, шарнирный параллелограммный механизм с горизонтально-наклонными и вертикально-наклонными звеньями, элементы крепления и успокоитель, горизонтально-наклонные звенья параллелограммного механизма выполнены в виде равнобедренных треугольников с основаниями, расположенными выше вершин этих треугольников, и соединенных шарнирами на концах оснований с вертикально-наклонными звеньями указанного механизма, причем маятниковое приспособление содержит в качестве груза маятника остов, соединенный с параллелограммным механизмом посредством вертикальной балки, связанной с горизонтально-наклонными звеньями при помощи шарниров, установленных в районе вершин соответствующих треугольников выше центра тяжести остова.
При этом, успокоитель автоколебаний устройства может быть выполнен в виде двух гидравлических амортизаторов, шарнирно-закрепленных между вертикально-наклонными и горизонтально-наклонными звеньями параллелограммного механизма.
Кроме того, устройство может содержать средства подрессоривания ходовой системы, включающей в себя опорные колеса с осями, причем указанные средства выполнены индивидуальными или каждой из осей и закреплены на вертикально-наклонных звеньев параллелограммного механизма.
В одном из вариантов исполнения устройство снабжено упругими шторами для закрытия боковых и поперечных сторон параллелограммного механизма, а также донной части устройства. Кроме того, шарниры параллелограммного механизма покрыты эластичным защитным материалом.
Наконец, высота треугольника, как минимум у верхнего горизонтально-наклонного звена параллелограммного механизма, может быть выполнена регулируемой, причем высота его меньше или больше, чем у нижнего.
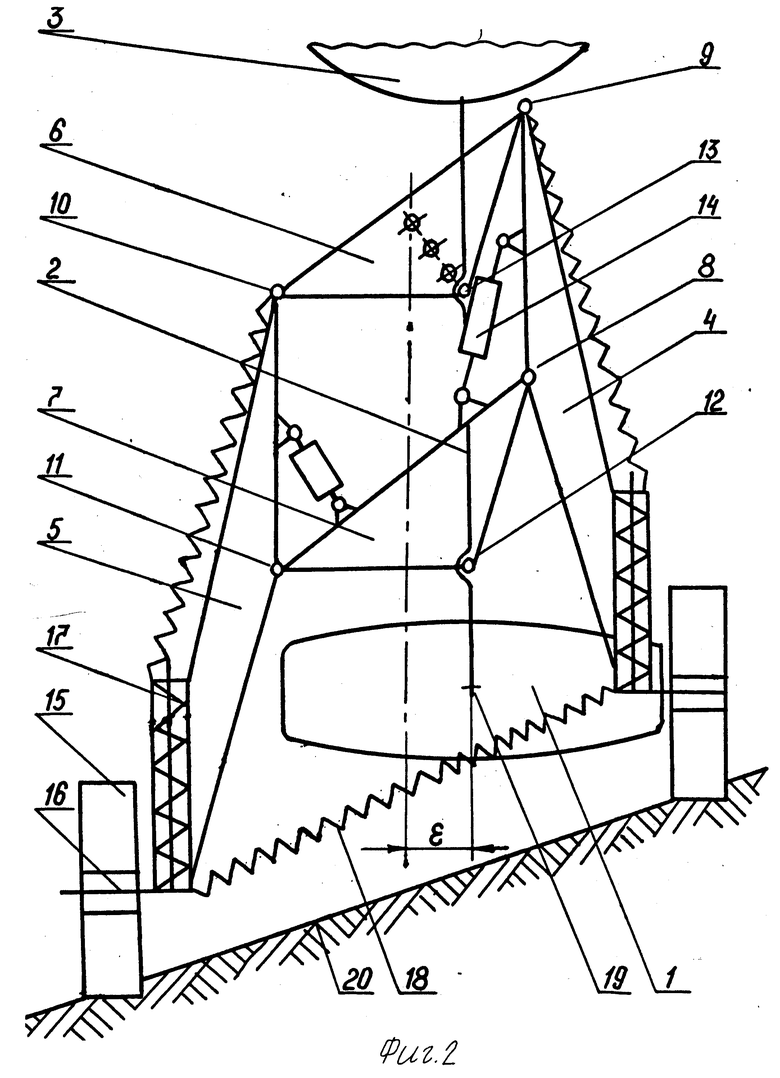
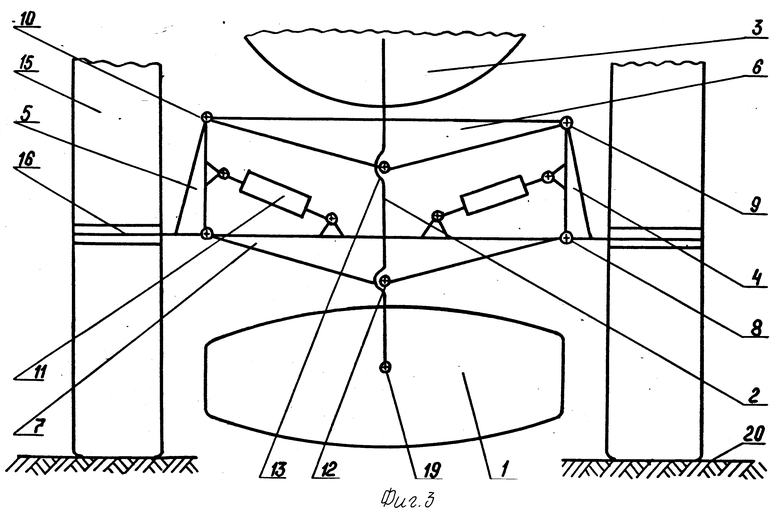
На фиг. 1 изображено высококлиренсное и одновременно крутосклонное техническое устройство в варианте поперечной стабилизации при креплении остова выше оси ходовых колес или точек опоры параллелограммного механизма на опорную поверхность (вид сзади); на фиг. 2 то же, в работе, например при движении по крутым склонам или при качке на палубе морского судна; на фиг. 3 - низкоклиренское техническое средство в варианте поперечной стабилизации при креплении остова ниже оси ходовых колес.
Условные обозначения, принятые на схемах:
1 остов,
2 вертикальная балка (стойка) для подвешивания остова к параллелограммному механизму,
3 возможная верховая надстройка над подвеской остова, для размещения обслуживающего персонала,
4, 5 вертикально-наклонные звенья параллелограммного механизма,
6, 7 горизонтально-наклонные звенья параллелограммного механизма,
8, 9, 10, 11 периферийные шарниры для соединения звеньев параллелогрммного механизма между собой,
12, 13 средние шарниры для соединения наклонных звеньев 6 и 7 с вертикальной балкой (стойкой) 2 остова 1,
14 успокоитель колебаний (амортизатор),
15 колесо ходовой системы,
16 ось колеса,
17 элементы индивидуального подрессоривания колес,
18 упругие шторы для защиты сочленений от посторонних предметов,
19 центр тяжести остова,
20 опорная поверхность под ходовыми колесами.
В варианте поперечной стабилизации устройство включает:
остов 1 с вертикальной балкой 2 для подвешивания к параллелограммному механизму и с возможной (но не всегда обязательной) верховой надстройкой 3 над вертикальной балкой 2 остова 1,
вертикально-наклонные звенья 4 и 5, а также горизонтально-наклонные звенья 6 и 7 параллелограммного механизма.
периферийные шарниры 8, 9, 10 и 11 для соединения звеньев параллелограммного механизма между собой, а также срединные шарниры 12 и 13 для соединения горизонтально-наклонных звеньев 6 и 7 с вертикальной балкой 2 остова 1,
успокоители колебаний (амортизаторы) 14 параллелограммного механизма,
колеса ходовой системы 15 с осями 16 и элементами индивидуального подрессоривания 17,
упругие шторы 18 для защиты шарнирных сочленений от посторонних предметов.
Вертикально-наклонные звенья 4 и 5, а также горизонтально-наклонные звенья 6 и 7, совместно с периферийными шарнирами 8, 9, 10 и 11 образуют одноплоскостный параллелограммный механизм. У вертикально-наклонных звеньев 4 и 5 внутренние стороны являются вертикальными сторонами параллелограммного механизма и оснащены односторонними шарнирами 8 и 9, 10 и 11, расположенными по вертикали, а наружные стороны выполнены с наклоном от ходовых колес 15 в сторону вертикальной оси параллелограммного механизма. Горизонтально-наклонные звенья 6 и 7 параллелограммного механизма выполнены в форме равнобедренных треугольников, вершины которых расположены ниже оснований и оснащены односторонними шарнирами 12 и 13 для связи с вертикальной балкой 2, остова 1. Высота расположения шарниров 12 и 13 относительно оснований горизонтально-наклонных звеньев 6 и 7 может быть регулируемой, как высота равнобедренных разновысотных треугольников.
Конструкционное исполнение успокоителя колебаний 14 может быть основано на принципе магнетизма, электромагнетизма, пневматики, гидравлики и механики. Частные решения данного вопроса состоят в том, что в качестве успокоителя используют гидравлические амортизаторы 14 (подобно автомобильным), закрепленные между ветикально-наклонными звеньями 4, 5 и горизонтально-наклонными звеньями 6, 7.
Остов 1 подвешен к параллелограммному механизму через посредством передних и задних вертикальных балок 2, шарнирно прикрепляемых к вершинам 12 и 13 треугольников 6 и 7, то есть к вершинам треугольников гогризонтально-наклонных звеньев 6 и 7 и параллелограммного механизма.
В качестве остова может быть использован любой наиболее тяжелый узел устройства, нуждающийся в стабилизации вертикального и горизонтального положений, без больших поперечных кренов, например:
двигатель вместе с муфтой сцепления, коробкой перемены передач и задним мостом самоходного транспортного средства,
кузов автомобильного или тракторного прицепа вместе с перевозимым в нем грузом,
кузов или кабина вместе с пассажиром (пассажирами).
Размещение над параллелограммным механизмом верховой надстройки 3, например в виде кабины для обслуживающего персонала (оператора, сигнальщика, водителя, командира и т. д.), предусматривает возвышения ее над остовом с целью улучшения обзорных качеств перед транспортным средством.
Особо важные условия обеспечения работоспособности устройства заключаются в том, что:
центр тяжести остова 1 и шарниры 12, 13, а также вертикальная ось параллелограммного механизма при размещении колес ходовой системы 15 на горизонтальной опорной поверхности 20 расположены соосно, на одной вертикали,
центр тяжести 19 остова 1 расположен ниже шарнира 12, при этом суммарный опрокидывающий момент от массы параллелограммного механизма и ходовой системы меньше противоопрокидывающего момента от массы остова, действующей на плече от его центра тяжести 19 до шарнира 12,
горизонтально-наклонные звенья 6 и 7 выполнены в форме треугольников, вершины которых расположены ниже оснований и оснащены односторонними шарнирами 12, 13, а высота треугольников значительно меньше их оснований,
расстояние между центрами колес 15 по ширине захвата устройства (его колея) больше ширины параллелограммного механизма (то есть больше длины горизонтально-наклонных звеньев 6 и 7),
взаимные перемещения деталей параллелограммного механизма, остова 1 и успокоителей колебаний 14 соответствуют заданным углам кренов.
Устройство для обеспечения стабилизации остова в продольном направлении аналогично описанному.
Устройство может быть оснащено ходовыми колесами 15 (в варианте мобильного транспортного средства) или более вовсе без них (при использовании в качестве устройств по стабилизации кабин на кораблях для командиров, наблюдателей, сигнальщиков и наводчиков стрельбы по морским животным).
Для перемещения мобильного транспортного средства в условиях неровного микрорельефа местности предусмотрено индивидуальное подрессоривание колес 15.
Устройство стабилизации остова работает следующим образом.
При движении транспортного средства по горизонтальной поверхности и при отсутствии динамических нагрузок на ходовую систему остов 1 с вертикальной балкой 2 и верховой надстройкой 3 находятся в вертикальном положении соосно параллелограммному механизму, а горизонтально-наклонные звенья 6 и 7 параллелограммного механизма находятся в горизонтальном положении, параллельно опорной поверхности 20.
При въезде транспортного средства на склон или при наезде колес 15 любой из сторон, например правой, на плавно-криволинейную поверхность почвы 20 горизонтально-наклонные звенья 6 и 7 приобретают крен в сторону наклона поверхности почвы (в данном случае влево). При этом угол наклона к горизонту левых сторон треугольников у горизонтально-наклонных звеньев 6 и 7 уменьшается, а правой увеличивается. За счет этого происходит смещение центра остова 1 от центральной оси параллелограммного механизма в нагорную сторону на величину "E" и вверх, то есть крен параллелограммного механизма вызывает перемещение остова 1 по горизонтали и вертикали, без изменения наклона к горизонту. Это предотвращает опрокидывание устройства вниз по склону. Таким образом одновременно обеспечивается копирований колесами неровностей рельефа местности и стабилизация остова от произвольных перемещений, например при движении остова от произвольных перемещений, например при движении по левостороннему склону холма одновременно с копированием неровностей микрорельефа обеспечивается стабилизация остова от боковых кренов и исключается опрокидывание устройства.
При некоторых обстоятельствах, например синхронных изменениях скоростного режима (разгон, торможение) или синхронных кренах параллелограммного механизма, возможны автоколебания остова. Величина этих автоколебаний зависит от величин сил трения в шарнирах 8, 9, 10, 11, 12 и 13 параллелограммного механизма, прямо пропорциональна взаимному соотношению масс параллелограммного механизма и остова, а также взаимному соотношению расстояния между шарнирами 12, 13 и расстояния от шарнира 12 до центра тяжести 19 остова 1. Автоколебания остова 1 ограничиваются успокоителем 14 и наличием сил трения в шарнирах 8, 9, 10, 11, 12 и 13 параллелограммного механизма.
При наезде опорных колес 15 на резко выраженные неровности микрорельефа поверхности почвы 20 (и связанных с этим динамических воздействиях) вначале происходит независимое копирование колесами неровностей микрорельефа без изменения формы параллелограммного механизма, благодаря перемещению элементов индивидуального подрессоривания 17 вдоль вертикально-наклонных звеньев 4 и 5. После срабатывания этих элементов приобретают крен горизонтально-наклонные звенья 6 и 7 параллелограммного механизма с одновременным перемещением остова 1 по вертикали и горизонтали. Одновременно из-за наличия сил трения в шарнирах и инерционного движения остова 1 на мгновение происходит вынужденный крен остова 1 в сторону крена горизонтально-наклонных звеньев 6 и 7 параллелограммного механизма. В дальнейшем под воздействием сил гравитации и маятникового крепления остов 1 самостоятельно возвращается в исходное положение, по инерции совершая небольшой крен в другую сторону. Возникшие таким образом автоколебания остова 1 гасятся успокоителями колебаний 14.
Упругие шторы 17 защищают шарниры параллелограммного механизма от воздействия различного хлама, их размеры изменяются в соответствии с изменением формы параллелограммного механизма. Защита параллелограммного механизма от поломок и заклинивания необходима с целью безопасности движения по крутым склонам во избежание опрокидывания.
На транспортных устройствах, где предъявляются повышенные требования к стабилизации остова, горизонтально-наклонные звенья 6 и 7 параллелограммного механизма предусматривают равновеликими по высоте, а в тех случаях, когда обслуживающий персонал нуждается в ощущении кренов остова, высоту треугольника у верхнего горизонтально-наклонного звена 6 устанавливают меньше или больше, чем с нижнего горизонтально-наклонного звена 7, либо основание его устанавливают ниже вершины, то есть верхнее звено 6 поворачивают на 180o (на схемах не показано).
| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортное средство для работы на склонах | 1982 |
|
SU1133126A1 |
| ТРАНСПОРТНАЯ ПОДВЕСКА (ВАРИАНТЫ) | 2006 |
|
RU2306230C1 |
| Бортовой редуктор колесного крутосклонного трактора | 1984 |
|
SU1232515A1 |
| Крутосклонный трактор | 1977 |
|
SU701857A1 |
| Крутосклонный трактор | 1975 |
|
SU572396A1 |
| Трактор для работы на склоне | 1989 |
|
SU1726289A1 |
| Транспортное средство для работы на склонах | 1988 |
|
SU1516383A1 |
| Крутосклонное транспортное средство | 1980 |
|
SU931567A1 |
| Пропашной трактор для работы на склонах | 1987 |
|
SU1518151A1 |
| Устройство стабилизации крутосклонного трактора | 1987 |
|
SU1556936A1 |
Использование: область транспортного, промышленного, сельскохозяйственного и оборонного машиностроения, а также строительство, преимущественно наземные и надводные объекты, нуждающиеся в стабилизации остова от кренов. Сущность изобретения: устройство содержит остов 1 с вертикальной балкой 2 для подвешивания к параллелограммному механизму (ПМ), вертикально-наклонные звенья 4, 5, наклонные звенья 6, 7 и шарниры 8, 9, 10, 11, ПМ. Звенья 6 и 7 шарнирами 12 и 13 соединены с балкой 2. Между звеньями 4, 5 и 6, 7 закреплены успокоители автоколебаний 14. К нижним концам звеньев 4, 5 прикреплены колеса ходовой системы 15 с осями 16 и элементами подрессоривания 17. При движении устройства по склонам, например, при движении правого колеса по нагорной стороне, а левого по подгорной, происходит крен влево ПМ: угол наклона к горизонту левых сторон треугольников у наклонных звеньев 6 и 7 уменьшается, а правой стороны - увеличивается. За счет этого происходит смещение центра остова 1 от центральной оси ПМ в нагорную сторону. 5 з.п. ф-лы, 3 ил.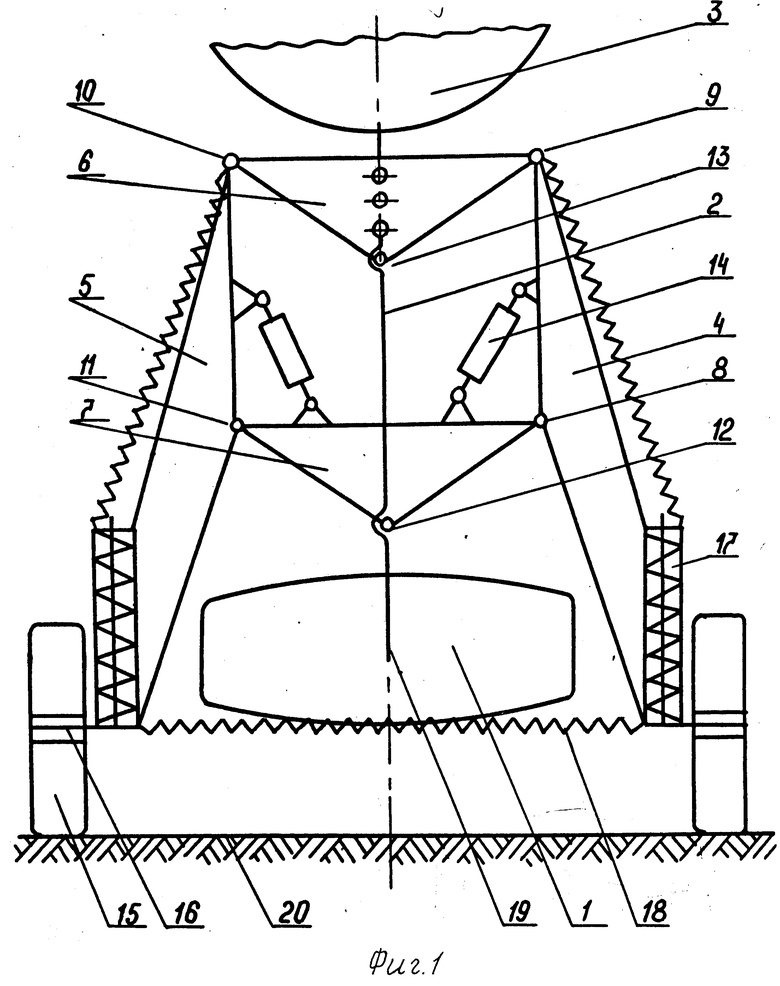
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| НАВЕСНОЙ МЕХАНИЗМ ТРАКТОРА^-^^иП1Ш"ТРхш-;':Е1{дя;БИ5ЛИО~ГКА 1-- -.i:••- •• -••• - • ! | 0 |
|
SU329876A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для обнаружения бокового сноса транспортного средства | 1982 |
|
SU1071240A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Устройство стабилизации крутосклонного трактора | 1978 |
|
SU716882A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
