(54) УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ЛИСТОВ СТЕКЛА
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для передачи листов стекла в направлении, перпендикулярном основному | 1978 |
|
SU727576A1 |
| Устройство для передачи листов стекла | 1978 |
|
SU783248A1 |
| Откатчик листов стекла | 1979 |
|
SU948902A1 |
| Устройство для перемещения листов стекла | 1977 |
|
SU656984A1 |
| Линия для изготовления стекол "триплекс | 1979 |
|
SU975601A1 |
| Устройство для разделения сплошного транспортного потока листового стекла | 1977 |
|
SU659536A1 |
| Устройство для передачи листовых материалов с конвейера на конвейер | 1978 |
|
SU700398A1 |
| Линия для нанесения защитного покрытия на металлизированную поверхность зеркал | 1988 |
|
SU1537648A1 |
| Устройство для передачи листового материала | 1975 |
|
SU603636A1 |
| СЕКЦИЯ РОЛЬГАНГА С ОТКАТЧИКОМ | 1969 |
|
SU250397A1 |
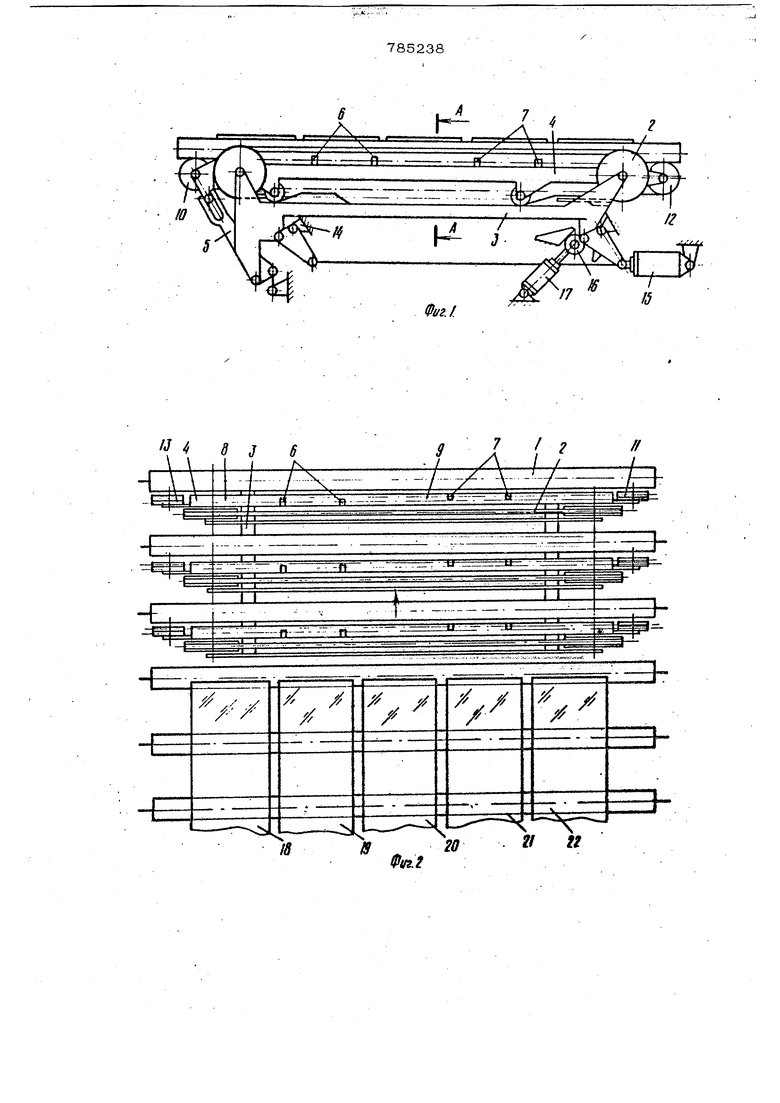
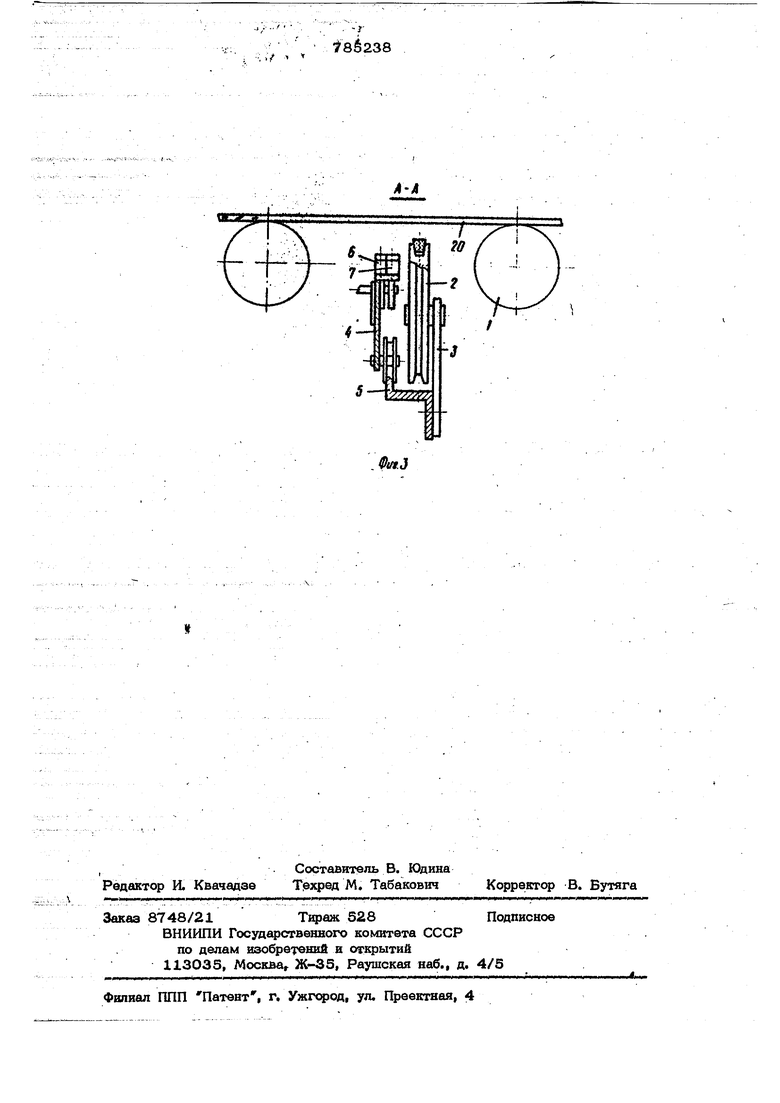
Изобретение относится к промышленности строительных материалов, в частности к оборудованию для изготовления листового стекла. Известно устройство для передачи листового стекла, включающее рольганг и откатчик с бесконечными ремнями, опорную раму и привод . Наиболее близким по технической сущности и достигаемому эффекту к изобретению является устройство для передачи листов стекла в поперечном направлении, содержащее рольганг, расположенные между его валками в виде бесконечных ремней откатчики, смонтированные на подъемной раме, опорйую раму, механизм подъема, связанньгй со штоком силового цилиндра. На опорной раме смонтированы планки, установлейные с возможностью меныиего (в сравнении с ремцями OTKaiN чика), но опережающего подъема под верх 9ИМИ образующими валков, рольганга . Наличие палок исключает динамические нагрузки ремней откатчика при захвателиста, так как движущийся лист стекла захватывается планками, после чего ремнями снимается с неподвижшзхх планок неподвижный лист.. Однако эти устройства не обеспечивают выборочного захвата листов из многорядного грузопотока. Целью изобретения является улучшение управления потоком листов за счет выборочной их передачи. Достигается эта цель тем. Что устройство для передачи листов стекла в поперечном направлении, содержащее рольганг расположенные между его валками в виде бесконечных ремней откатчики смонтированные на подъемной раме опорную раму, механизм подъема связанный со штоком ьшового цилиндра снабжено ловителями, установленными на подъемной раме программным направлением, связанным с лс вителями, и дополнительным цилиндром с упором, ограничивающим подъем опорной рамы смонтированной с возможностью вертикального перемещения от механиз ма подъема. На фиг. 1 изображено устройство, вид сбоку, на фиг. 2 - то же, вид в плане, на фиг, 3 - разрез А-А фиг. 1. Между валкайи рольганга I расположены ременные откатчики 2, смонтирован ные на подъемной раме 3, на которой также установлены и планки 4. Планки 4 установлены с возможность первоначального опережающего подъем.. ремней 2 вертикального перемещения на величину хода подъемной рамы 3. Эта возможность обеспечивается конструкцией кулачково-рычажного привода 5. На планках 4 установлены с возможностью установочного перемещения вдоль планки ловители 6 и 7, снабженные дистанционно программным управлением, вы полненным, например, в виде замкнутых .цепей 8 и 9 огибающих приводные 10, 11 и холостые 12, 13 звездочки, закрепленные на планках 4. Подъемная рама 3 связана с неподвижной опорой 14 двухщаговым механизмом подъема, в полнеиным в виде шарнирного четырехзвенника приводимого в действие двигателем 15, например, пневматическим с дистанционно управляемым упором 16 с приводом 17.. По рольгангу 1 передвигаются в награвлении стрелки листы стекла 18, 19 20, 21, 22 в многорадном (5 рядов) грузопотоке. Работает устройство следующим образом. В исходном положении ремни от катчиков 2 находятся ниже уровня верхних образующих валков рольганга 1, ловители 6 и 7 располагаются ниже уровн ремней, а упор 16 располагается,по пути движения одного из звеньев че Ырех авенного механизма подъема. Ловители 6 и 7 установлены по осям рядов, из которых в соответствии с заданной программой захватываются и перемещаются листы. При поступлении листов в зону захвата включается двигател 15, который с помощью механизма подЬе ма поднимает раму 3 на высоту огранич ; ную действием упора 16. При этом ре1«1ни от катчиков 2 не достигают уровня верхних образующих валков рольганга i, а ловнели 6 и 7 поднимаясь выше этого уровя захватывают листы 19 и 21. Листы 18, 20 и 22 беспрепятственно проходят зону захвата, после чего включается привод 17 которым упор 16 убирается с пути перемещения звена механизма подъема и подъем рамы возобновлйется. При этом с помощью кулачково-рычажно-: го привода 5 планки 4 с ловителями 6 и 7 в относительном движении опускаются, чем обеспечивается передача листов 19 и 21 на ремни отка -чиков 2, которыми осуществляется дальнейшее их перемещение. По окончании перемещения листов стекла переключается двигатель 15, опуcKaeTcia рама 3, переключается привод 17 и упор. 16 возвращается в исходное положение. При поступлении следующей группы листов цикла захвата и перемещения их повторяется. Применение устройства в линиях производства листового стекла позволит улучшить управление потоком листов и более полно автоматизировать процесс транспортировки их. Формула изобретения Устройство для передачи листов стекла в поперечном направлении, содержащее рольганг, расположенные между его валками в виде бесконечных ремней откатчики, смонтированные на подъемной раме, опорную раму, механизм подъема, связанный со щтоком силового цилиндра, отличающееся тем, что, с целью Улучшения управления потоком листов за счет обеспечения Выборочной их передачи, оно снабжено ловителями, установленными на подъёмной раме, программным управлением, связанным с ловителями, и дополнительным цилиндром с упором, ограничивающим подъем . Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР 370181, кл. С 03 В 15/18, 1971. 2.Авторское свидетельство СССР № 4142О5, кл. С 03 В 15/18, 1972.
