1
Изобретение относится к гидЕгаавтоматике, может быть использовано в электрогидравлических приводах стан ков и промышленных роботах.
Известен электрогидравлический следящий привод, содержащий задающий электродвигатель, связанный с ним дросселирующий .распределитель, расположенный в одном корпусе с исполнительным гидроцилиндром, и винтовой механизм обратной связи, вы- ходной вал которого установлен на подшипниках в крьзшке корпуса 1.
Недостатками известного привода являются большие осевые габариты и трудность присоединения дополнительных датчиков,
.Целью изобретения являются сокращение осевых габаритов и обеспечение возможности присоединение дополнительных датчиков.
Указанная цель достигается тем, что в крышке и корпусе выполнена дополнительная расточка, параллельная оси гидроцилиндра, в которой распо-. ложен распределитель, при этом механизм обратной связи снабжен промежуточным валом, установленным на подшипниках в одной расточке с распределителем и связанным с противоположной последнему стороны к хлики через цилиндрическую зубчатую передачу с выходным валом винтового ме5 ханизма.
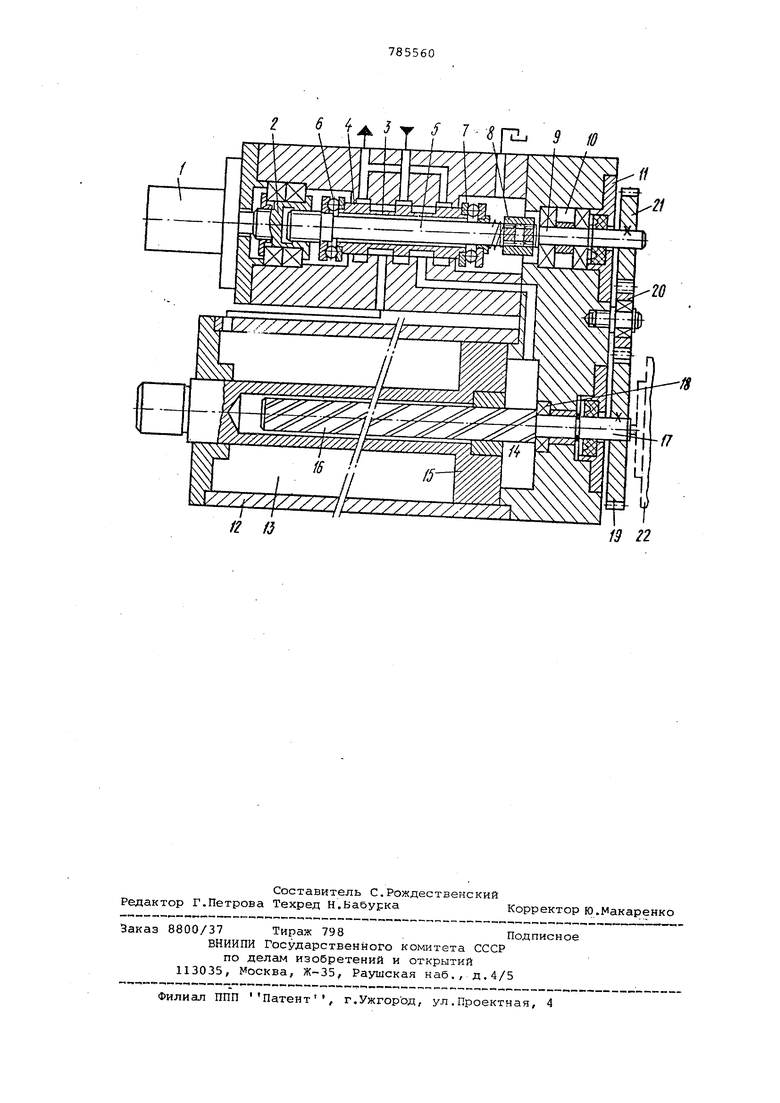
На чертеже изображен электрогидравлический следящий привод.
Привод содержит задающий электродвигатель 1, соединенный с гайкой
to 2, В золотнике 3 дросселирующего распределителя 4 размещен валик 5, соединенный с золотником 3 через упорные подшипники 6 и 7, которяде обеспечивают возможность вращения
15 валика 5 и одновременно связывают валик 5 с золотником 3 при движении вдоль оси. Левым резьбовым концом валик 5 ввернут в гайку 2, а его правый конец через ылицевую муфту 8
20 соединен с промежуточным валом 9, установленным на подшипниках в дополнительной расточке 10 крышки 11 и корпуса 12 исполнительного гидро- цилиндра 13. Гидроцилиндр 13 имеет
25 винтовой механизм обратной связи, состоящий из гайки 14, закрепленный в поршне 15, и винта 16 с несамотормозяшей резьбой, выходной вал 17 ко.торого закреплен на подшипниках 18 в
30-крышке 11. Промежуточный вал 9 с
противоположной распределителю 4 сто РОНЫ крышки 11 соединен с валом 17 через цилиндрическую зубчатую передачу, имеющую зубчатые колеса 19-21, дополнительный датчик 22, который может присоединяться при необходимое ти к выходному валу 17 винтового механизма для контроля положения и.пи скорости выходного элемента привода {штока гидррцилиндра 13),
Привод работает следующим образом
При подаче управляквшго сигнала Jia электродвигатель 1 гайка 2 пово рачиваетс я,перемещая золотник 3 дросселирующего распределителя 4. Рабочая жидкость поступает в одну из полостей гидроцилиндра 13, вызйвая перемещение поршня 15.Гайка 14, перемещаясь вместе с поршнем 15, поворачивает винт 16, закрепленнйй в осевом направлении, Через зубчатую передачу (19-20-21) поворо-г передается валу 9, который через шлицевую муфту 8 поворачивает валик 5,Валик 5 ввертывается (или вывертывается) в гайку 2 и перемещает эолот ник 3, возвращая его в исходное положение.
Таким образом, осуществляется управление с помощью эгщаюиего электйодвигателя поступательным перемещением штока силового цилиндра.
В качестве задающего электродвигателя может использоваться шаговый эл ектродвигатель или двигатель постоянного тока.
Соответственно датчик 22 может использоваться для целей цифровой индукции и циклового программного уп равления или в качестве датчика обратной связи по положению или скорости выходного элемен.та привода.
Линейные осевые габариты привода определяются практически только размерами исполнительного гидроцилиндра, т.е. являются минимальными, что расширяет область его применения в условиях ограниченного в осевом направлении пространства для размещения привода. В случае размещения привода на поворачивающемся рабочем .органе, например, поворотной руке промышленного робота, уменьшение осевых размеров привода позволяет уменьшить момент инерции рабочего органа с приводом и соответственно увеличить скорость его поворота,.
Таким образом, применение изобретения позволяет повысить эффективность и универсальность приводов станков и промышленных роботов. Формула изобретения
Электрогидравлический следящий привод, содержащий задающий электродвигатель, связанный с ним дросселирующий распределитель, расположенный в одном корпусе с исполнительным гидродилиндром, и винтовой механизм обратной связи, ,, выходной вал которого установлен на подшипниках в крышке корпуса, отличающийся тем Что, с целью сокращения осевых габаритов и обеспечения возможности присоединения дополнительных датчиков, в крышке и корпусе выполнена дополнительная расточка, параллельная оси гидроцилиндра, в которой расположен распределитель, при этом механизм обратной связи снабжен промежуточньм валом, установленным на подшипниках В одной расточке с распределителем и связанным с противоположной последнему стороны крышки через цилиндрическую зубчатую передачу с выходным валом винтового механизма.
Источники информации, принятые во внимание при экспертизе
1. Патент США f 3899956, кл, F 15 В 9/10, опублик,1975 (прототип) , 12 /J S 7-- 9 to
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ РУЛЕВОЙ ПРИВОД | 2013 |
|
RU2513055C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ АГРЕГАТ, СЛЕДЯЩИЙ ДВУХКАСКАДНЫЙ ГИДРОУСИЛИТЕЛЬ И РЕГУЛИРУЕМЫЙ СИЛОВОЙ ДРОССЕЛЬ | 2002 |
|
RU2242641C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2004 |
|
RU2262467C1 |
| Цифровой электрогидравлический привод | 1978 |
|
SU792002A1 |
| ГИДРАВЛИЧЕСКОЕ УПРАВЛЯЮЩЕЕ УСТРОЙСТВО | 2012 |
|
RU2514812C1 |
| РЕЗЕРВИРОВАННЫЙ СЛЕДЯЩИЙ ГИДРОМЕХАНИЧЕСКИЙ ПРИВОД ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2004 |
|
RU2266234C1 |
| Ленточно-шлифовальный станок | 1981 |
|
SU971630A1 |
| Рука промышленного робота | 1983 |
|
SU1174255A1 |
| СИСТЕМА СИНХРОНИЗАЦИИ ГИДРОЦИЛИНДРОВ | 1996 |
|
RU2105907C1 |
| АВТОНОМНЫЙ ГИДРОПРИВОД-БЛОК ЭЛЕКТРОГИДРАВЛИЧЕСКИХ РУЛЕВЫХ МАШИН | 2003 |
|
RU2262625C2 |