Изобретение относится к машиностроению, в частности к робототехнике, и предназначено для механизации и автоматизации производственных процессов.
Цель изобретения - улучшение динамической характеристики и упрощение конструкции за счет уменьшения количества веса подвижных частей устройства.
На фиг. 1 дана компоновка механической руки промышленного робота; на фиг. 2 - принципиальная гидравлическая схема приводов.
Рука промышленного робота выполнена в виде несушей рамы 1, в заднем отсеке которой размешены блок 2 управления привода качания и блок 3 управления привода врашения кисти, представляюшие собой электрогидравлические шаговые приводы. Модуль 4 ориентируюших движений, содержащий исполнительный механизм 5 качания кисти и механизм вращения кисти, выполненные в виде гидромотора 6 с редуктором 7, установлен дистанционно относительно блоков 2 и 3 управления в передней части несущей рамы 1 и связан с блоками управления трубопроводами.
Гидромотор 6 с редуктором 7 установлен на валу 8, жестко связанном с выходным валом исполнительного механизма качания кисти так, что обеспечено уравновешивание полезной нагрузки за счет компенсирующего момента, создаваемого весом гидромотора 6. Трубопроводы от блока управления привода вращения кисти и распределителя 9, управляющего схватом 10, подведены к установленной на уплотнениях маслоразводящей муфте 11, а в валу 8 выполнены каналы, связанные с гидроцилиндром схвата 12 и с гидромотором 6.
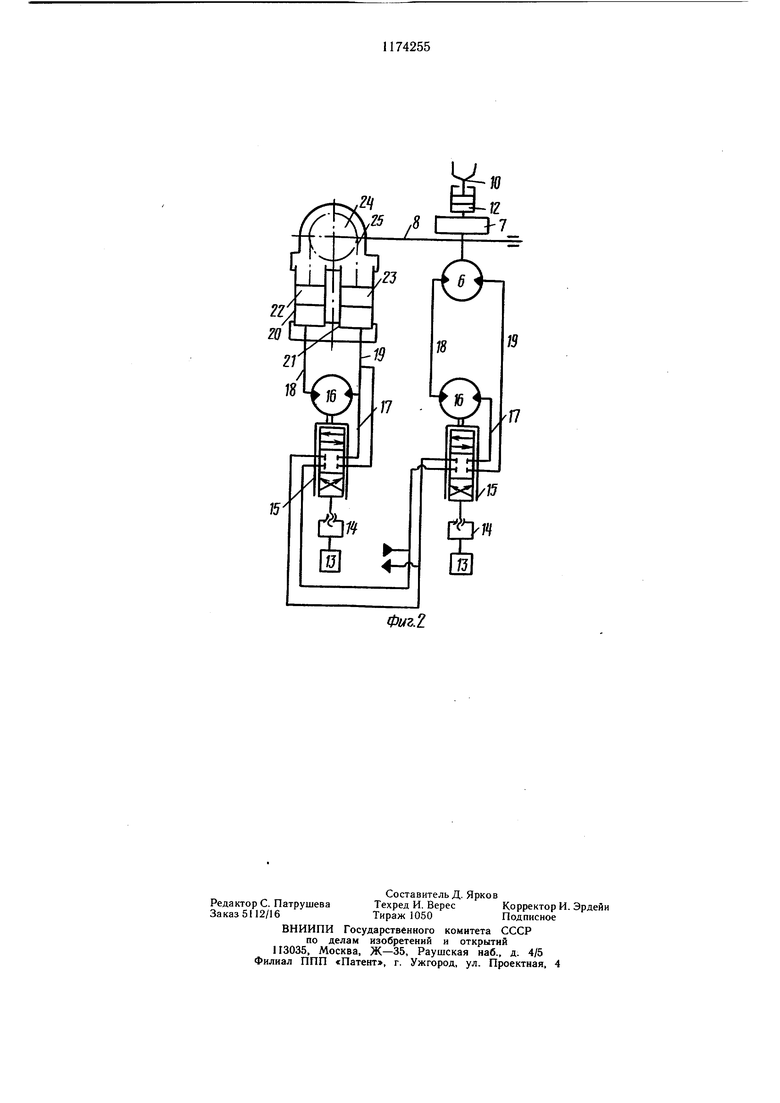
Гидравлическая схема приводов ориентирующих движений кисти выполнена по принципу дистанционной передачи силового потока.
Приводы качания и вращения кисти содержат однотипные блоки управления движением качания и движением вращения. Блоки 2 и 3 управления, представляющие собой электрогидравлические шаговые приводы,содержат задающий шаговый двигатель 13, связанный через винтовую передачу 14 с распределителем 15, задающий гидромотор 16, связанный с распределителем 15 механической обратной связью по углу поворота. Однако, например правая, рабочая
полость задающего гидромотора 16 подключена посредством магистрали 17 к одному выходному каналу распределителя 15, другая, левая, полость задающего гидромотог ра 16 и другой выходной канал распределителя 15 подключены магистралями 18 и 19 к исполнительному механизму 5 качания и исполнительному механизму 6 вращения. Гидромотор 16 является, в данном случае, задающим двигателем, осуществляющим
только функции обратной связи.
Исполнительный механизм качания кисти выполнен в виде двух спаренных гидроцилиндров 20 и 21, поршни 22 и 23 которых связаны между собой через звездочку 24 цепью 25 одностороннего изгиба. Звездочка 24 установлена на валу 8, с которым жестко связан исполнительный механизм вращения кисти в виде гидромотора 6 с редуктором 7. На валу редуктора 7 установлены схват 10 и гидроцилиндр 12 схвата.
0 Рука промышленного робота работает следующим образом.
При подаче задающего воздействия с щагового двигателя 13 через винтовую передачу 14 на дросселирующий золотник блока 2 управления привода качания кисти, правая рабочая полость задающего гидромотора 16 сообщается через распределитель 15 и магистраль 17 со сливом масла, а рабочая полость гидроцилиндра 21 сообщается через магистраль 19 с подводом масла.
0 Внещняя нагрузка прилол ена на валу 8, создавая перепад давлений в рабочих полостях гидроцилиндров 20 и 21. Задающий гидромотор 16 при этом не нагружен, в обеих рабочих полостях его давления практически одинаковы, что значительно уменьщает внутренние перетечки.
При этом порщень 23 движется вверх, а порщень 22 - вниз и цепь 25 одностороннего изгиба передает движение поршней на звездочку 24 и вал 8 с установленным на
0 нем исполнительным механизмом вращения кисти - гидромотором 6 с редуктором 7 и схватом 10.
При этом поворачивается и вал задающего гидромотора 16, к которому последовательно присоединен исполнительный ме ханизм качания кисти. Поскольку вал задающего гидромотора 16 связан механической обратной связью с дросселирующим распределителем 15, гидравлический привод является следящим. Аналогичным образом работает привод вращения кисти.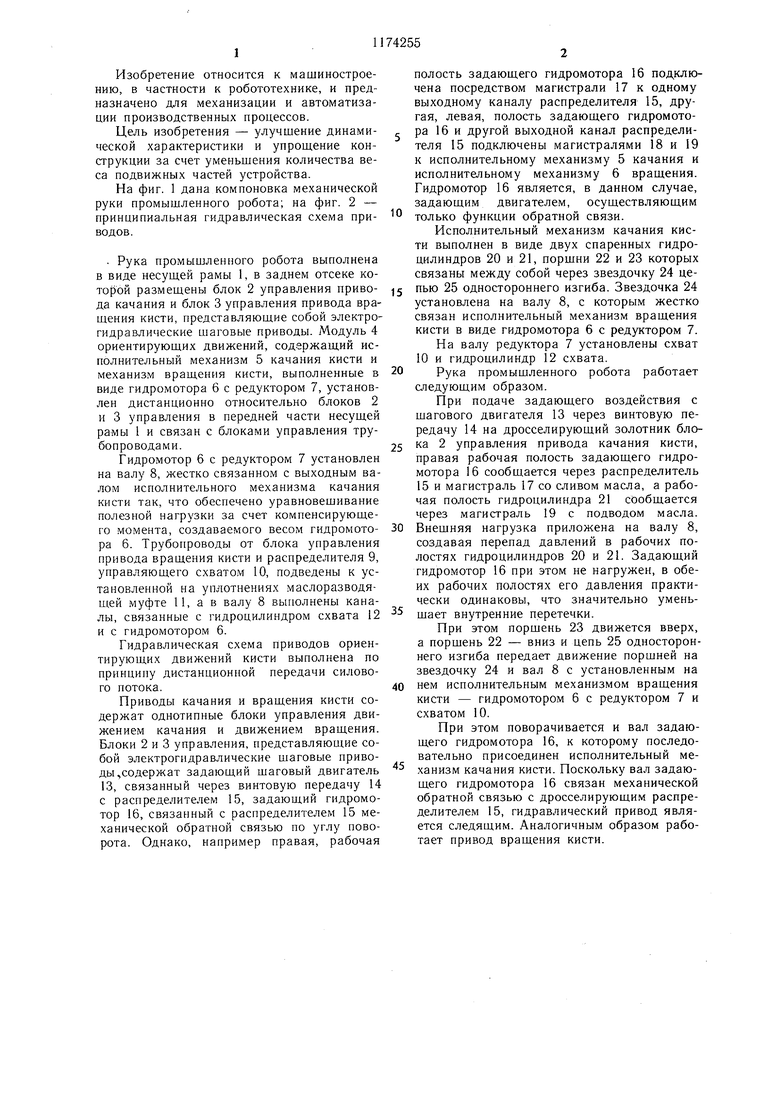
| название | год | авторы | номер документа |
|---|---|---|---|
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2003 |
|
RU2241594C1 |
| Робот к листоштамповочному прессу | 1976 |
|
SU565818A1 |
| УСТРОЙСТВО ДЛЯ ПОДАЧИ МАТЕРИАЛОВ | 1991 |
|
RU2042597C1 |
| Машина для рытья траншей | 1979 |
|
SU829825A1 |
| Рулевое управление с изменяемым передаточным числом | 1971 |
|
SU472047A1 |
| ГИДРОПРИВОД ОДНОКОВШОВОГО ЭКСКАВАТОРА | 2005 |
|
RU2304667C1 |
| Гидрообъемная трансмиссия полно-пРиВОдНОгО ТРАНСпОРТНОгО СРЕдСТВА | 1976 |
|
SU823182A1 |
| Следящий привод | 1978 |
|
SU751620A1 |
| Однокоординатная следящая сис-TEMA | 1979 |
|
SU844834A1 |
| Электрогидравлический следящий привод | 1978 |
|
SU785560A1 |
РУКА ПРОМЫШЛЕННОГО РОБОТА, содержаш,ая раму, исполнительный механизм вращения и качания кисти с приводами, отличающаяся тем, что, с целью улучшения динамической характеристики и упрощения конструкции, каждый привод исполнительного механизма содержит два соединенных последовательно и разнесенных относительно рамы гидродвигателя и следящий золотник, причем вал одного гидродвигателя соединен с исполнительным механизмом, а вал другого - с корпусом следящего золотника. 4 to СП СП
| Бабич А | |||
| В | |||
| и др | |||
| Промышленная робототехника | |||
| М.: Машиностроение | |||
| Устройство для видения на расстоянии | 1915 |
|
SU1982A1 |
| Видоизменение прибора с двумя приемами для рассматривания проекционные увеличенных и удаленных от зрителя стереограмм | 1919 |
|
SU28A1 |
| Прялка для изготовления крученой нити | 1920 |
|
SU112A1 |
