1
Изобретение относится к машиностроению, в частности к автоматическим загрузочным устройствам, работающим в составе робототехнологических комплексов, и касается автоматической системы управления приводом загрузочных устройств.
Наиболее близким к предлагаемому по технической сущности и достигаемому эффекту является автоматический пневмопривод, преимущественно для загрузочных устройств щиберного типа, содержащий силовой цилиндр с крыщкой, в котором установлен с образованием щтоковой и бесщтоковой полостей порщень, щток которого связан с , связанным в свою очередь с накопительным магазином, распределительное устройство, рычажную систему управления, взаимодействующую с перемещаемой деталью, магистраль подвода рабочей среды к силовому цилиндру 1.
Недостатком известного автоматического пневмопривода является его зависимость от вяещнего оборудования, вследствие чего оно не обладает достаточной автоматичностью и простотой системы управления, особенно применительно к координированно работающим многопозиционным системам, связанным посредством промышленных роботов.
Цель изобретения - упрощение системы управления путем обеспечения циклического перемещения шибера в зависимости от наличия детали на исходной позиции.
Цель достигается тем, что распределительное устройство установлено в бесштоковой полости силового цилиндра и выполнено в виде седла на его крышке и взаимодействующего с последним подпружиненным
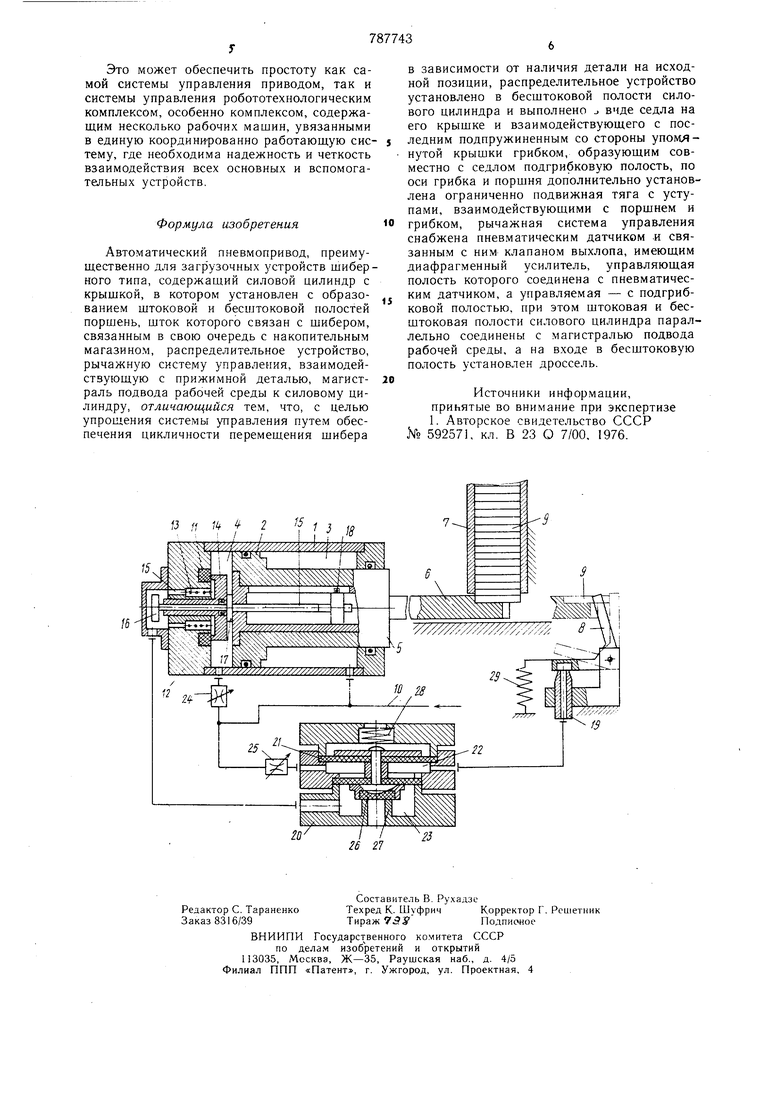
10 со стороны упомянутой крышки грибком, образуюшим совместно с седлом подгрибковую полость, по оси грибка и поршня дополнительно установлена ограниченно подвижная тяга с уступами, взаимодействую15щими с поршнем и грибком, рычажная система управления снабжена пневматическим датчиком и связанным с ним клапаном выхлопа, имеющим диафрагменный усилитель, управляющая полость которого соединена с пневматическим датчиком, а управляе20мая - с подгрибковой полостью, при этом щтоковая и бесштокоЕая полости силового цилиндра параллельно соединены с магистралью подвода рабочей среды, а на ьходе В бесштоковую полость установлен дроссель. На чертеже представлена схема предлагаемого устройства. Устройство содержит силовой цилиндр 1, внутри которого помещен поршень 2, разделяющий упомянутый цилиндр 1 на штоковую 3 и бесштоковую 4 полости. Поршень 2 связан со штоком 5, который вне силового цилиндра 1 переходит в шибер 6. Последний связан с накопительным магазином 7. Устройство содержит также рычажную систему б управления, которая взаимодействует с деталью 9, помеш,енной в накопительном магазине 7. К силовому цилиндру 1 подсоединена магистраль 10 подвода рабочей среды. Распределительное устройство выполнено в виде седла 11, установленного в крышке 12 силового цилиндра 1 и взаимодействуюш,его через пружину 13 с грибком 14. Последний совместно с седлом 11 образует подгрибковую полость. По оси грибка 14 и поршня 2 установлена с ограниченной подвижностью тяга 15, имеющая на своей поверхности уступы 16-18. Упомянутые уступы могут взаимодействовать с поршнем 2 и грибком 14. Рычажная система 8 управления снабжена пневматическим датчиком 19 и связанным с ним клапаном 20 выхлопа. Последний снабжен диафрагменным усилителем 21 управляюшая полость 22 которого соединена с пневматическим датчиком 19, а управляемая полость 23 соединена с подгрибковой полостью. Штоковая 3 и бесштоковая 4 полости силового цилиндра 1 параллельно соединены с магистралью 10 подвода рабочей среды. На входе в бесштокозую полость 4 установлен дроссель 24. В магистраль 10 перед входом в управляюшую полость 22 установлен дополнительный дроссель 25. Внутри клапана 20 выхлопа в управляемой полости 23 размещен затвор 26, взаимодействующий с выхлопным отверстием 27. С противоположной стороны клапан 20 выхлопа имеет пружину 28, воздействующую на диафрагменный усилитель 21 и через него на затвор 26. Рычажная система 8 управления снабжена возвратной пружиной 29. Автоматический пневмопривод работает следующим образом. В положении, изображенном на чертеже грибок 14 прижат к седлу И поршнем 2, и в изолированной от подгрибковой полости бесштоковой полости 4 развивается полное сетевое давление, под воздействием которого поршень 2, а вместе с ним соединенный со штоком 5 шибер 6 с деталью 9, начинают движение вправо (по чертежу), При этом грибок 14 под действием перепада давлений на противопложных торцах удерживает закрытой бесштоковую полость 4 и остается прижатым давлением сжатого воздуха к седлу 1.1. При подходе к крайнему правому (по чертежу; положению тяга 15 своим уступом 18 взаи.модействует с поршнем 2 и приходит в движение, выбирая зазор между уступом 16 и торцом грибка 14. При упоре тяги 15 в торец грибка 14 последний отрывается от седла 11 и под воздействием усилия пружины 13 остается в открытом положении, рабочая среда из бесштоковой полости 4, постоянно питаемой через дроссель 24, через подгрибковую полость устремляется к клапану 20 выхлопа. Одновременно с этим деталь 9, находящаяся на шибере 6, взаимодействуя с рычажной системой 8 управления пневматического датчика 19, открывает его сопло. При этом давление в управляющей полости 22 клапана 20 выхлопа резко сбрасывается, так как сечение подводящей линии, содержащей дополнительный дроссель 25, меньше сечения линии, соединяюшей подгрибковую полость с управляемой полостью 23. Действием усилия пружины 28 затвор 26 остается прижатым к выхлопно.му отверстию 27, исключая выхлоп рабочей среды из бесштоковой полости 4 через подгрибковую полость и управляемую полость 23 клапана 20 выхлопа. Так блокируется привод, и шибер 6 с деталью 9 остаются в крайнем правом положении до тех пор, пока деталь 9 не будет снята специальным захватом (на чертеже не показан). Как только деталь 9 оказывается снятой, рычажная система 8 управления под действием возвратной пружины 29 закрывает сопло пневматического датчика 19. Это вызывает повышение давления в управляющей полости 22, вследствие чего пружина 28 сжимается и затвор 26 поднимается. При этом бесштоковая полость 4 через управляемую полость 23 и выхлопное отверстие 27 соединяются с атмосферой. При этом в бесштоковой полости 4, имеющей канал выхлопа большего сечения, чем подводящий канал с дросселем 24, резко сбрасывается давление, и поршень 2 вместе с присоединенным к штоку 5 шибером 6 под воздействием сетевого давления в штоховой полости- 3 движется до левого крайнего положения. В этом положении шибер 6 производит захват новой детали 9 из накопительного магазина 7, а поршень 2, воздействуя на грибок 14, прижим ет его к седлу 11, перекрывая тем самым подгрибковую полость. После этого цикл движения повторяется. Предлагаемый пневмопривод обладает достаточно простой системой управления, выполненной без внешних управляющих устройств, линий связи с внешним оборудованием и с использованием для целей управления самого энергоносителя - рабочей среды. Это может обеспечить простоту как самой системы управления приводом, так и системы управления робототехнологическим комплексом, особенно комплексом, содержащим несколько рабочих машин, увязанными в единую координированно работающую систему, где необходима надежность и четкость взаимодействия всех основных и вспомогательных устройств. Формула изобретения Автоматический пневмопривод, преимущественно для загрузочных устройств шиберного типа, содержащий силовой цилиндр с крышкой, в котором установлен с образованием штоковой и бесштоковой полостей поршень, шток которого связан с ш ибером, связанным в свою очередь с накопительным магазином, распределительное устройство, рычажную систему управления, взаимодействующую с прижимной деталью, магистраль подвода рабочей среды к силовому цилиндру, отличающийся тем, что, с целью упрощения системы управления путем обеспечения цикличности перемещения щибера в зависимости от наличия детали на исходной позиции, распределительное устройство установлено в бесщтоковой полости силового цилиндра и выполнено ., виде седла на его крышке и взаимодействующего с последним подпружиненным со стороны упомлнутой крышки грибком, образующим совместно с седлом подгрибковую полость, по оси грибка и поршня дополнительно установлена ограниченно подвижная тяга с уступами, взаимодействующими с поршнем и грибком, рычажная система управления снабжена пневматическим датчиком и связанным с ним клапаном выхлопа, имеющим диафрагменный усилитель, управляющая полость которого соединена с пневматическим датчиком, а управляемая - с подгрибковой полостью, при этом штоковая и бесштоковая полости силового цилиндра параллельно соединены с магистралью подвода рабочей среды, а на входе в бесштоковую полость установлен дроссель. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР Jo 592571, кл. В 23 О 7/00, 1976.
| название | год | авторы | номер документа |
|---|---|---|---|
| Загрузочное устройство | 1980 |
|
SU891329A1 |
| Устройство для монтажа радиодеталей на печатную плату | 1985 |
|
SU1412027A1 |
| Пневмопривод возвратно-поступательного действия с автоматическим реверсированием | 1978 |
|
SU767410A1 |
| ПНЕВМАТИЧЕСКИМ ПРИВОДОМ | 1971 |
|
SU295151A1 |
| Пневмогидропривод | 1981 |
|
SU1028907A1 |
| Позиционный пневматический привод | 2018 |
|
RU2689662C1 |
| ПНЕВМОЦИЛИНДР | 1991 |
|
RU2006684C1 |
| Тормозное управление ведущего моста транспортного средства | 1984 |
|
SU1181904A1 |
| Адаптивный схват | 1986 |
|
SU1395480A1 |
| ПНЕВМАТИЧЕСКИЙ БЕЗЫГОЛЬНЫЙ ИНЪЕКТОР | 1999 |
|
RU2155015C1 |
