(54) УСТРОПСТВО ДЛЯ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРОВ

| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для балансировки изделий | 1979 |
|
SU862012A1 |
| СПОСОБ БАЛАНСИРОВКИ РОТОРА | 2004 |
|
RU2292534C2 |
| Устройство для дефектоскопии внутренней поверхности труб | 1987 |
|
SU1578628A1 |
| ПОЛУАВТОМАТИЧЕСКИЙ БАЛАНСИРОВОЧНЫЙ СТАНОК | 2012 |
|
RU2515102C1 |
| СПОСОБ УРАВНОВЕШИВАНИЯ СТРУКТУРНО-НЕОДНОРОДНОГО ЖЕСТКОГО РОТОРА С НАКЛОННЫМ ДИСКОМ | 1999 |
|
RU2153154C1 |
| Инклинометр | 1982 |
|
SU1102914A1 |
| УСТРОЙСТВО ДЛЯ БАЛАНСИРОВКИ ОБЪЕКТА | 1999 |
|
RU2147733C1 |
| Способ балансировки ротора газоперекачивающего агрегата | 2017 |
|
RU2658597C1 |
| СПОСОБ БАЛАНСИРОВКИ РОТОРА В ОДНОЙ ПЛОСКОСТИ КОРРЕКЦИИ | 2012 |
|
RU2499985C1 |
| Устройство для управления приво-дОМ РАздВижНОй дВЕРи КАбиНы лифТА | 1978 |
|
SU812685A1 |
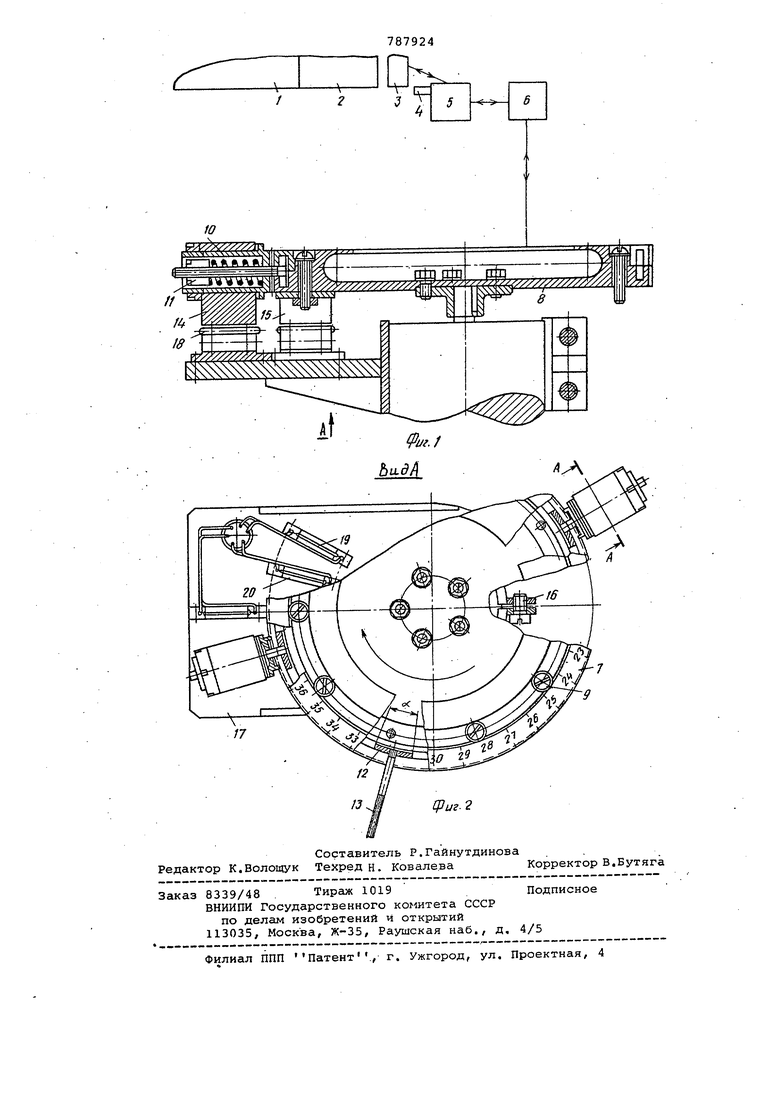
Изобретение относится к области динамического уравновешивания тяжелых роторов в процессе их работы, преимущественно турбоагрегатов. Известно устройство для балансиров ки роторов, преимущественно турбоагре гатов в процессе их работы, содержаще диск с балансировочными грузами, связанный с ними механизм корректировки с приводом и схему управления приводом механизма корректировки. Механизм корректировки выполнен в виде фланца с отверстиями и штуцерами, в которые подается сжатый воздух, распределяющий балансировочные грузы по грузовым камерам диска l. Недостатком устройства является конструктивная сложность его,так как камеры диска и отверстия механизма корректировки должны быть соосными, что трудно выполнимо в условиях агрегатирования. Точность балансировки зависит от размера балансировочных грузов (шариков), которые подбираются в процессе работы, что снижает точ ность, Наиболее близким по технической сущности и достигаемому результату к изобратению является устройство дл динамической балансировки роторов, преимущественно турбоагрегатов в процессе их работы, содержащее диск с балансировочными грузами, связанный с ними механизм корректировки с приводоь5 и схему управления приводом механизма корректировки 2, Недостаток устройства - невысокая точность уравновешивания роторов в связи с тем,что отсутствует информация об исходном расположении балансировочных грузов перед началом операций по их перемещению и по окончании перемещения t Цель изобретения - повышение точ-ности балансировки. Это достигается тем, что устройство содержит механизм контроля положения балансировочных грузов, выполненный в виде лимба, соосно закрепляемого на роторе, не менее двух подпружиненных стаканов, установленных на образующей поверхности лимба с возможностью углового перемещения, и постоянные магниты, кaJKДый из которых закреплен на соответствующем стакане и связан со схемой управления. На фиг, 1 изображено устройство, общий вид; на фиг, 2 - вид А на фиг..
Устройство для динамической балансировки ротора 1 содержит диск 2с балансировочными грузами 3, связанный с ними механизм 4 корректировки с рычагом, привод 5 механизма корректировки и схему 6 управления приводом механизма 4 корректировки. Устройство содержит также механизм контроля положения балансировочных грузов, который выполнен в виде лимба 7, соосно закрепляемого на роторе 1 посредством лимбодержателя 8. При этом лимб
7имеет возможность перемещаться по лимбодержателю 8, после чего закрепляется в определенном положении винтами 9, На образующей поверхности лимба с- лимбодержателем установлены с вoз южнocтью углового перемещения подпружиненные стаканы 10 с регулировочной гайкой 11, каждый из которых соединяется с лимбодержителем 8 лимба 7 посредством гайки 12
и стержня 13i На каждом стакане закреплён постоянный магнит 14, при этом количество стаканов с магнитом соответствует количеству балансировочных грузов , размещенных на диске, но не менее трех. На лимбодержателе
8закреплен постоянный магнит 15. С ротором посредством винтов 16 соединяется также платформа 17, на которой размещены магнитоуправляемые контакты-герконы 18,19 и 20 схемы
6 управления.
Устройство работает следующим образом.
Неуравновешенный ротор 1 переводится в режим медленного вращения. .Диск 2 с балансировочными грузами 3, закрепленный на роторе 1, вращается вместе с ним. Лимбодержатель с закрепленным на нем посредством винтов 9 лимбом 7 вращается синхронно с ротором 1. Включается схема б управления. Как только геркон 19 окажется в зоне действия магнита 15, на привод 5 поступа ет сигнал и рычаг механизма 4 корректировки перейдет в рабочее положение. При этом груз 3 вступает в контакт с рычагом, который перемещает его по диску 2. На лимбе. 7 с помощью отметчика (не-показан), связанного со схемой управления, будет нанесена метка, показывающая угловое положение балансировочного груза 3. Количество меток соответствует количеству грузов 3 в ди ке 2. Как только геркон 18окажется в зоне действия магнита 14, схема 6 отключит привод 5, при этом рычаг механизма 4 корректировки пропустит балансировочный груз 3. Когда геркон
18 выйдет из зоны действия магнита 14, механизм 4 корректировки снова включится, рычаг войдет в контакт со вторым балансировочны1-1 грузом и начнет двигать его до тех пор, пока второй груз не встанет на место. Ана логич.но происходит работа по установке остальных баласировочных грузов. Изменяя расположение магнитоуправляемых контактов на платформе,-можно менять порядок перемещения грузов
О 3 в диске 2. После того,как все грузы займут положение , сводящее к.миниму-. му дисбаланс ротора 1, магнит 15 окажетсй в зоне действия геркона 20 и схема 6 отключится. Для повторного
5 запуска схемы б в работу совмещают магнит 15 с -герконом 19 и цикл перемещения грузов 3 по диску 2 в случае необходимости повторяется..
Таким образом,, в устройстве автоQ матизировано перемещение балансировочных грузов по диску. Кроме того, механизм контроля положения балансировочных грузов повышает точность балансировки, так как позволяет полус чить информацию о положении балансировочных грузов в диске, установленном на роторе в плоскостях коррекции, которые зачастую недоступны для визуального контроля из-за больших габаритов балансируемого турбоагрегата, а также исключить ошибки при перемещении грузов по диску. Формула изобретения
Устройство для динамической-балан-v 5 сировки роторов, преимущественно турбоагрегатов в процессе их работы, содержащее диск с балансировочными Грузами, связ.анный с ними механизм корректировки с пр.аводом и схему уп- 0 равления приводом механизма корректировки, отличающееся тем, что, с целью повышения точности , оно содержит механизм контроля положения балансировочных грузов, выполненный в , виде лимба, соосно закрепляемого на, роторе, не менее двух подпружиненных стаканов, установленных на образующей поверхност-и лимба с возможностью - УГЛОВОГО перемещения и, постоянные
магниты, каждый из которых закреплен на соответствующем стакане и связан со схемой управлен-йя.
Источники Информации, принятые во внимание при экспертизе
кл. G 01 М 1/36, 1976 (прототип)
