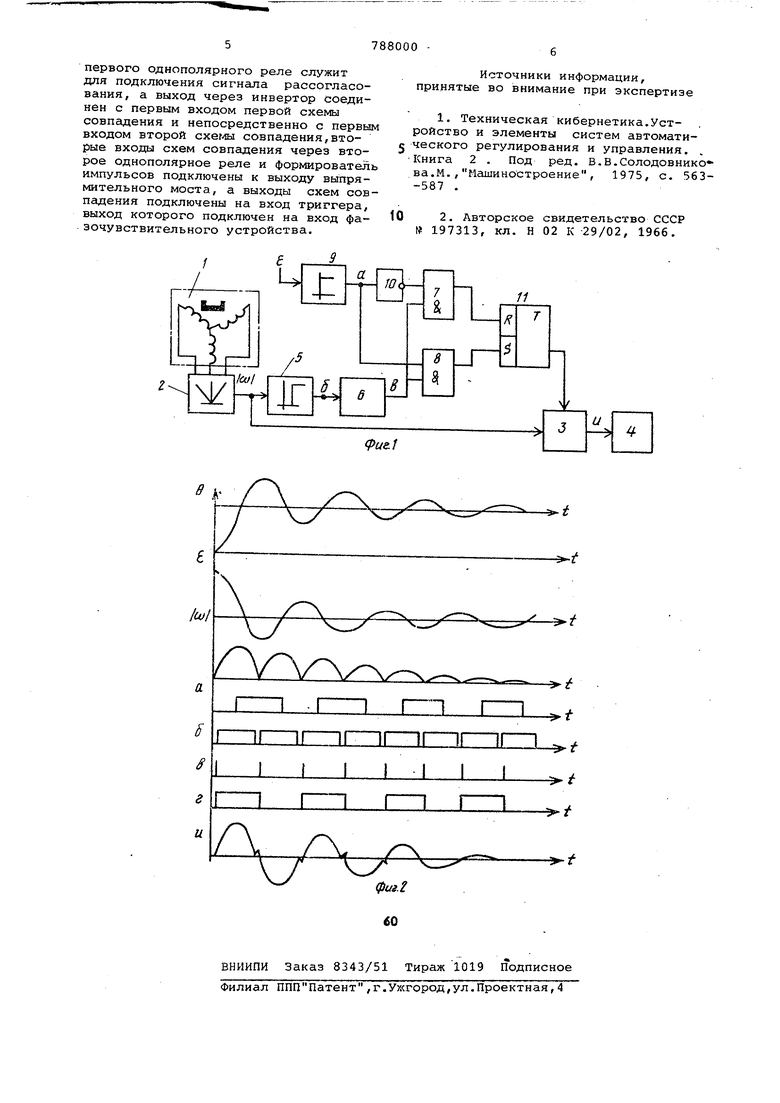
Изобретение относится к устройствам, предназначенным для измерения скорости вращения, и может быть использовано в электромеханических сле дящих системах для коррекции их динамических характеристик. . Известны реверсивные тахогенераторы постоянного тока, содержащие щеточно-коллекторный узел.Эти ус ройства отличаются простотой конструкции ll. Основной их недостаток состоит в низкой надежности щеточно-коллекторного узла. Известны бесконтактные асинхронные реверсивные тахогенераторы надежность которых выше из-за отсутствия щеточно- коллекторного узла J,l Существенный недостаток этих тахометрических устройств состоит в том, что для их работы требуется отдельный источник опорного напряжения переменного тока, что ухудшает массбгабаритные показатели тахогенератора в целом. Наиболее близким к изобретению по технической сущности и достигаемому результату является реверсивный бесконтактный тахогенератор посто.янного тока, содержащий синхронную машину, статорная обмотка которой через выпрямительный мост подключена к одному входу реверсивного мостового каскада, другой вход которого соединен с выходом фазочувствительного устройства, состоящего из логической схемы, управляемой датчиком положения ротора, а к выходу реверсивного мостового каскада подключена нагрузка 2. Основные недостатки этого тахогенератора связаны с наличием отдельного датчика положения ротора, в результате чего увеличиваются момент инерадии ротора, масса и габариты всей машины, требуются дополнительные источники для питания датчика. Цель изобретения - уменьшение инерционности и улучшение массогабаритных и энергетических показателей бесконтактных тахогенераторов постоянного тока, используемых для коррекции следящих систем, повышение их надежности. Поставленная цель достигается тем, что в реверсивном бесконтактном тахо генераторе для следящих систем, содержащем синхронную машину, статорная обмотка которой через выпрямительный мост подключена к одному входу реверсивного мостового каскада, др гой вход которого соединен с выходо фазочувствительного устройства, а выход - с нагрузкой, фазочувствител ное устройство содержит два однополярных реле, формирователь имдуль сов по переднему фронту и две схем совпадения, на вход первого однополярного реле подключен сигнал рассо ласования следящей системы, а выход через инвертор подключен к первому входу первой схемы совпадения и неп редственно к первому входу второй схемы совпадения, на вторые входы схем совпадения через второе одноп лярное с зоной нечувствительности р ле и формирователь импульса по пере нему фронту подключен выход выпрями .тельного моста,выходы схем совпаден подключены на входы триггера,выход которого подключен на вход фазочувс :вительного устройства. На фиг. 1 изображена блок-схема тахогенератора; на фиг. 2 - эпюры сигналов на элементах схемы. Схема содержит синхронный тахог нератор 1, выпрямительный мост 2, реверсивный мостовой каскад 3, нагрузку 4, второе однополярное с зоной нечувствительности реле 5, формирователь б импульса по переднему фронту, первая 7 и вторая 8 схемы совпадения- соответственно,пер вое однополярное реле 9, инвертор 10 и триггвр 11, /LwJ- выходное напряжение выпрямительного мостаS : и - выходное напряжение реверсивного мостового каскада, 9 - выходной угол следящей системы, - ошибка (сигнал рассогласования) системы. Напряжение, снимаемое со статорных обмоток синхронного тахогенератора 1, выпрямляется выпрямительным мостом 2 и подается на реверсивный мостовой каскад 3 с нагрузкой 4 и на второе однополярное с зоной нечувствительности реле 5,выход которого через формирователь 6 импульса по переднему фронту пос тупает на вторые входьа первой и вто рой схем 7 и 8 совпадения. Сигнал рассогласования f следящей системы, для коррекции которой используется предлагаемый тахогенератор, через первое однополярное реле 9 подается на первый вход второй схемы 8 совп дения и через инвертор 10 на первый вход первой 7 совпадения. Вы ходы схем 7 и 8 совпаденияподаются на входы триггера 11,выход которого подключен к реверсивному мостовому каскаду 3. Выходной угол Q в гследящей системе, где используется для целей коррекции предлагаемый тахогенератор, при типовом ступенчатом входном воздействии носит, например,колебательный характер. Он изобретен на диаграмме & (фиг.2;, ниже изобрахсе на диаграмма изменения сигнала ошибки системы, подаваемого на первое однополярное реле 9, Выходной сигнал q однополярного реле 9 поступает черев инвертор 10 и непосредственно на первые входы первой 7 и второй 8 схем совпадения. Выпрямленный выходной сигнал/о;/ синхронного тахогенератора является моду-лем производной от сигнала оишбки следящей cиcтe iы и на выходе второго однополярного с зоной н ечу ветви тел irности реле 5 дает изображенный на диаграмме (Г импульсный сигнал, передние фропты которого (диаграмма 6) после формирователя б импульсов поступают на вторые входы схем 7 и 8 совпадения . Эти импульсы поочередно проходят через схемы 7 и 8 совпадения либо на один , либо на дрУгой вход триггера 11, меняя его состояние и, следовательно,,меняя полярность выходного напряжения и реверсивного мостового каскада 3 на нагрузке 4, т.е. полярность выходного напряжения тахогенератора определяется тем, через какую схему совпадения пройдет импульс переднего фронта с выхода формирователя б импульса на входы триггера 11. Выбор схемы совпадения определяется полярностью сигнала в момент прихода импульса переднего фронта. В результате полярность сигнала И на выходе реверсивн.сго мостового каскада соответствует полярности напряжения, которое было бы,например, на выходе реверсивного коллекторного тахогенератора постоянного тока. Таким образом,предложенное устройство имеет внешнюю характеристикуi реверсивного тахогенератора,но при этом в нем отсутствует датчик положения ротора, что улучшает массога- баритные и энергетические показатели устройства,уменьшает инерционность его вращаЕощихся частей и повышает в целом его надежность. Формула изобретения Реверсивный бесконтактный тахогенератор для следящих систем, содержащий синхронную машину, статорная обмотка которой, через выпрямительный мост подключена к одному входу реверсивного мостового каскада, другой вход которого соединен с выходом фазочувствительного устройства, отличающийся тем, что, с целью уменьшения инерционности, тахогенератор снабжен инвертором и триггером, фазочувствительное устройство содержит два однополярных реле, формирователь импульсов по переднему фронту и две схемы совпадения,вход
первого однополярного реле служит для подключения сигнала рассогласования, а выход через инвертор соединен с первым входом первой схемы совпадения и непосредственно с первым входом второй схеглы совпадения,вторые входы схем совпадения через второе однополярное реле и формирователь импульсов подключены к выходу выпрямительного моста, а выходы схем совпадения подключены на вход триггера, выход которого подключен на вход фазочувствительного устройства.
Источники информации, принятые во внимание при экспертизе
1. Техническая кибернетика.Устройство и элементы систем автоматического регулирования и управления. . Книга 2 . Под ред. В.В.Солодовнико ва.М.,Машиностроение, 1975, с. 563-587 .
2. Авторское свидетельство СССР № 197313, кл. Н 02 К 29/02, 1966.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство измерения скорости вращения бесконтактного двигателя постоянного тока | 1977 |
|
SU662867A1 |
| Тахогенератор вентильного электродвигателя | 1981 |
|
SU966597A1 |
| Бесконтактная следящая система постоянного тока | 1974 |
|
SU525921A1 |
| Бесконтактный тахогенератор | 1981 |
|
SU949504A1 |
| Бесконтактная следящая система постоянного тока | 1979 |
|
SU930238A2 |
| Бесконтактный следящий привод постоянного тока,оптимальной по быстродействию | 1973 |
|
SU459761A1 |
| Реверсивный бесконтактный тахогератор постоянного тока | 1980 |
|
SU862075A1 |
| Бесконтактный следящий привод постоян-НОгО TOKA | 1979 |
|
SU853606A1 |
| Датчик положения ротора вентильного двигателя | 1978 |
|
SU748701A1 |
| Реверсивный бесконтактный тахогенератор постоянного тока | 1984 |
|
SU1229695A1 |
ff
/
:У
/-
ы
7
