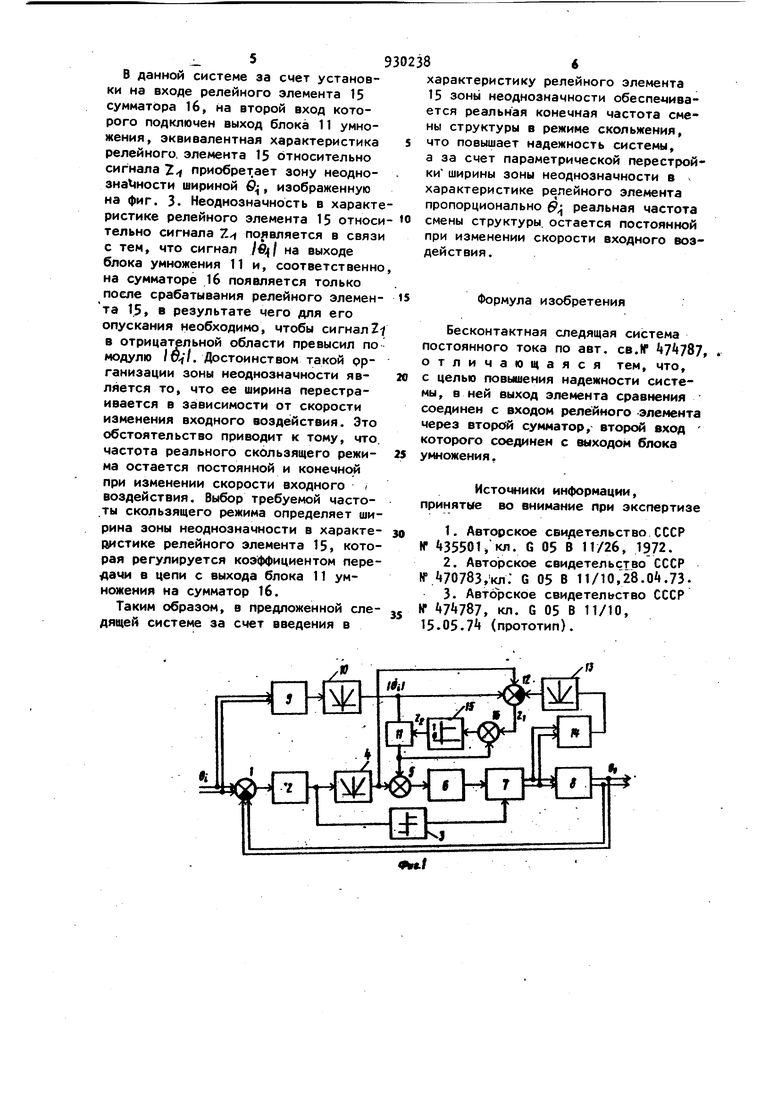
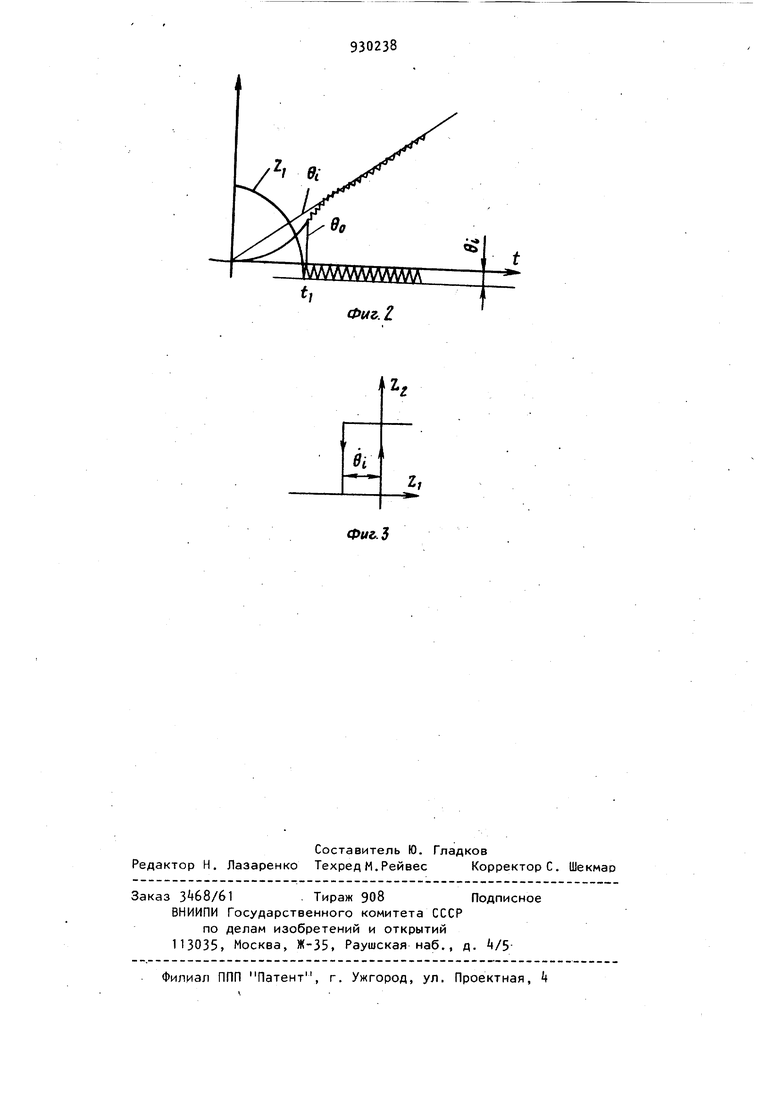
Изобретение относится к автоматике, а именно к комбинированным следящим системам с переменной структурой на основе бесконтактных двигателей постоянного тока, может быть использовано для получения постоянной частоты скользящего режима и повышения надежности таких систем; Известна следящая система, содержащая измеритель угла и рассогласования, входы которого связаны с вход ным и выходным валами системы, а выход которого через последовательно соединенные усилитель, выпрямитель, сумматор и модулятор подключен к первому входу бесконтактного двигателя постоянного тока, на второй вход которого через реле реверса подключен выход усилителя, тахогенер тор на входном валу системь, выход которого через выпрямитель подключён к входу сумматора, а вал двигателя через редуктор йвязан с выходным валом системы D1. Основной недостаток этой системы состоит в том, что в режиме вынужденных движений в ней возникают низкочастотные автоколебания из-за квазирелейного характера управления бесконтактным двигателем постоянного тока. Известна также система, содержащая последовательно соединенные измеритель рассогласования, усилитель, сумматор, модулятор и бесконтактный двигатель постоянного тока, на второй вход которого через реле реверса подключен выход усилителя, а выходной вал которого через редуктор соединен с вторым входом измерителя рассогласования, а также устаноапенлый на входном валу системы тахогенератор, выход которого через соответствующий выпрямитель соединен с первым входом элемента сравнения и с первым входом блока умножения, на второй вход элемента с-равнения подключен выход третьего выпрямителя, 3 9 соединенного с вторым тахогенератором, установленным на валу двигателя выход элемента сравнения через реле подключен к второму входу блока умножения, выход которого соединен с вторым входом сумматора f2. В такой системе за счет организации скользящего режима исключены низкочастотные автоколебания в режим вынужденных движений. Основной недо ctaTOK системы состоит в низком быстродействии, так как линия-скольжения совпадает с осью абсцисс фазовой плоскости системы и имеет нулевой наклон. По основному авт. св. ff из вестна бесконтактная следящая система постоянного тока, содержащая последовательно соединенные измеритель рассогласования, усилитель, первый выпрямитель, первый сумматор, широтно-импульсный модулятор, бесконтактный двигатель постоянного тока с релейным каналом реверса, вал которого связан с первым синхронным тахогенератором и через редуктор с измерителем рассогласования, другой вход которого соединен с вторым синхронным тахогенератором, через выпрямитель подключенным к блоку умножения и к элементу сравнения, друг(9й вход которого связан через третий выпрями тель с первым тахогенератором, а выход через релейный элемент - с блоком умножения, подключенным к пер вому сумматору, выход первого выпрямителя соединен с входом элемента сравнения 3 Основной недостаток известной системы состоит в том, что при идеальной релейной характеристике релейного элемента скользящий режим в системе при вынужденных движениях должен происходить с бесконечно большой частотой смены структуры. Современные ключевые .элементы на таких часто тах не работают, что объясняется, на пример, у транзисторных ключей их перегревом и, как следствие, отказом. При введении в характеристику релейного элемента неидеальности, например зоны неоднозначности постоя ной величины, частота скользящего ре жима начинает зависеть от скорости изменения входного воздействия. С уменьшением скорости входного воздей ствия снижается частота смены структуры системы, а с некоторой скорости 8 переключения структуры с помощьюрелейного элемента вообще отсутствуют, и.в системе возникают низкочастотные автоколебания. Це/1ь изобретения - повышение надежности системы. Поставленная цель достигается тем, что в системе выход элемента сравнения соединен с входом релейного элемента через второй сумматор, второй вход Которого соединен с выходом блока умножения. На фиг. 1 изображена блок-схема системы; на фиг. 2 - эпюры сигналов, поясняющие работу системы; на фиг. 3эквивалентная характеристика релейного элемента. Система включает измеритель 1 рассогласования, усилитель 2, реле 3 реверса, первый выпрямитель , первый сумматор 5, широтно-импульсный модулятор 6, бесконтактный двигатель 7 постоянного тока, редуктор 8, первый синхронный тахогенератор 9 второй выпрямитель 10, блок 11 умно-, жения, элемент 12 сравнения, третий выпрямитель 13, второй синхронный тахогенератор Ц, релейный элемент 15, второй сумматор 16. На схеме также обозначены входной угол 6, системы, выходной угол ©осистемы, производная & от входного угла системы, сигнал 7 на выходе элемента 12 сравнения, сигнал Z/jHa выходе релейного элемента 15. В установившемся режиме система работает в скользящем режиме, сущность .которого состоит в подключении и отключении с бесконечно большой частотой сигнала с выхода выпрямителя 10 к сумматору 5. В переходном режиме при линейноизменяющемся входном сигнале в-разгон двигателя 7происходит до момента сравнения суммарного сигнала с выпрямителей 4 и 10 с сигналом с выпрямителя 13. 8результате в начальной фазе пере-, ходного процесса двигатель 7 большой интервал времени разгоняется под действием напряжений рассогласования и с выпрямителя k и сигнала с выпрямителя 10,. что увеличивает быстродействие системы. Затем при равенстве суммы модулей напряжений рассогласования и тахогенератора 9 с модулем напряжения тахогенератора k устанавливается скользящий режим (фиг. 2). В данной системе за счет установ ки на входе релейного элемента 15 сумматора 16, на второй вход которого подключен выход блока 11 умножения, эквивалентная характеристика релейного, элемента 15 относительно сигнала 2 приобретает зону неоднознax нocти шириной 0, изображенную на фиг. 3. Неоднозначность в характ ристике релейного элемента 15 относ тельно сигнала 7. появляется в связ с тем, что сигнал /€,/ на выходе блока умножения 11 и, соответственн на сумматоре 16 появляется только после срабатывания релейного элемен та 15, в результате чего для его опускания необходимо, чтобы сигнал2 в отрицательной области превысил по модулю /а,-/. Достоинством такой организации зоны неоднозначности является то, что ее ширина перестраивается в зависимости от скорости изменения входного воздействия. Это обстоятельство приводит к тому, что частота реального скользящего режима остается постоянной и конечной при изменении скорости входного , воздействия. Выбор требуемой часто.ты скользящего режима определяет ширина зоны неоднозначности в характейистике релейного элемента 15, которая регулируется коэффициентом перелачи в цепи с выхода блока 11 умножения на сумматор 16. Таким Образом, а пре„„о«.н„ой еледщеи системе за счет .аедени, в 38 характеристику релейного элемента 15 зоны неоднозначности обеспе 4ивается реальная конечная частота смены структуры в режиме скольжения, что повышает надежность системы, а за счет параметрической перестройки ширины зоны неоднозначности в характеристике релейного элемента пропорционально 6 реальная частота смены структуры, остается постоянной при изменении скорости входного воздействия. Формула изобретения Бесконтактная следящая система постоянного тока по авт. св.If отличающаяся тем, что, с целью повышения надежности системы, в ней выход элемента сравнения соединен с входом релейного элемента через второй сумматор, второй вход которого соединен с выходом блока множения. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР - 35501;кл. G 05 В 11/26, 1972. 2.Авторское свидетельство СССР Л70783,кл: G 05 В 11/10,Т8.оА.73. л -. ITTTwl 3.Автбрское свидетельство СССР S.as.ji, (,ог°„) 
| название | год | авторы | номер документа |
|---|---|---|---|
| Бесконтактная следящая система постоянного тока | 1974 |
|
SU474787A1 |
| Бесконтактный следящий привод постоян-НОгО TOKA | 1979 |
|
SU853606A1 |
| Следящая система | 1979 |
|
SU788076A1 |
| Бесконтактная следящая система постоянного тока | 1973 |
|
SU470783A1 |
| Следящая система | 1979 |
|
SU847275A1 |
| Бесконтактный следящий привод постоянного тока | 1975 |
|
SU930241A1 |
| Следящая система | 1975 |
|
SU608119A1 |
| Бесконтактная следящая система постоянного тока | 1974 |
|
SU473988A1 |
| Бесконтактная следящая система постоянного тока | 1974 |
|
SU525921A1 |
| Следящая система | 1978 |
|
SU763851A1 |
ФИ&.3
