1
Предлагаемое устройство может быть построено на основе бесконтактного двигателя постоянного тока (БДПТ).
Известен беокоитактный следящий привод постояиного тока, оптимальный по быстродействию, содержащий последовательно соединенные элемент сра-внения, релейный элемент, блок умножения :и двигатель, котррый через редуктор соединен с элементом сравнения, нелинейный элемент, тахогенератор, установленный «а валу двигателя, и реле peBeipca, вход .которого подключен к выходу элемента сравнения, а выход - ко входу блока умножения.
Известные устройства имеют .низкую точность отработки сигналов разного знака, так как трудно реализовать идентичные ветви нелинейного элемента, а реверсивные бесконтактные тахогенераторы постоянного тока вносят запаздывание цри смене направления вращения.
Предлагаемый привод, отличается тем, что содержит выпрямитель, подключенный к тахогенератору, реле и блок умножения, первый вход которого соединен через нелинейный элемент с выпрямителем, второй через реле - с выходом элемента сравнения, а выход его подключен ко .второму входу реле реверса. Тахогене|ратар выполнен синхронным.
Это повышает точность работы привода.
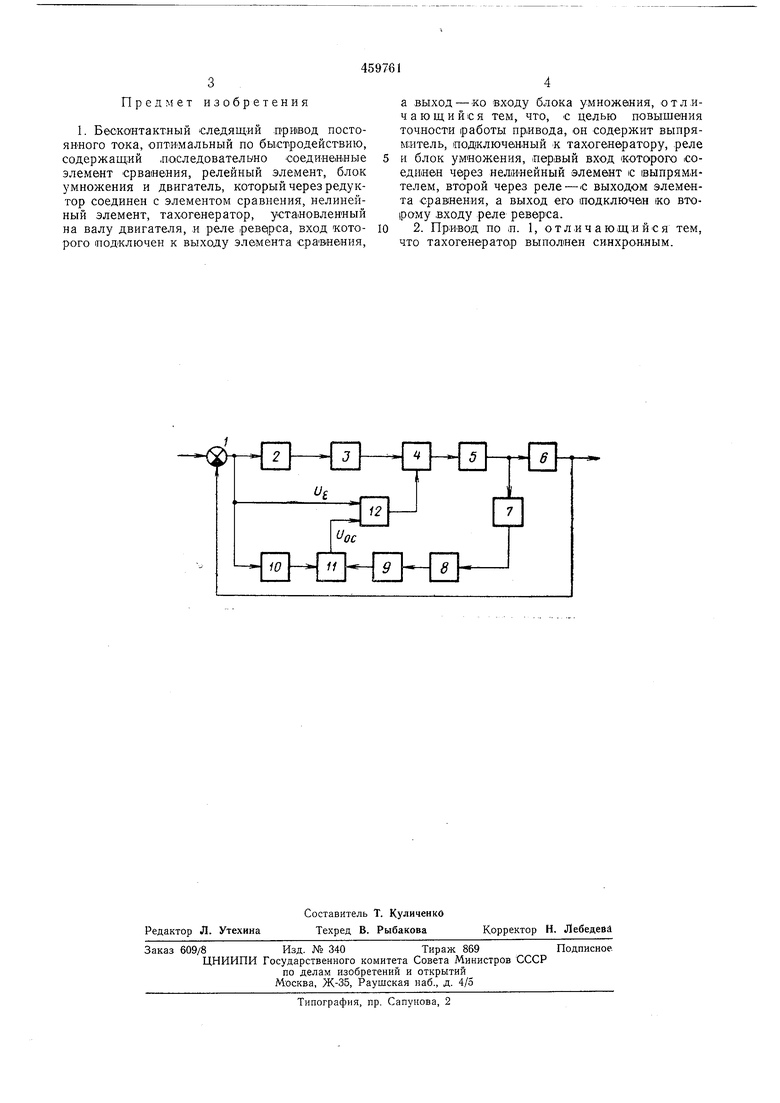
Па чертеже представлена блок-схема предложенного привода.
Привод содержит элемент сравнения 1, выпрямитель 2, релейный элемент 3, подключающий напряжение питания через блок умножения 4 к двигателю 5, выходной вал которого соединен с редуктором 6 и синхронным тахогенерато|ром 7. Выходное напряжение тахогенератора выпрямляется /п-фазным выпрямителем 8 и после преобразования нелинейным элементом 9 подается через блок измерения полярности, состоящий из реле 10, управляемого напряжением рассогласования U, , и блока умножения 11, сигнал с которого ,подается на один из входов реле реверса 12, второй вход которого подключен к выходу элемента сравнения 1. Управляющий сигнал, сформированный как разность напряжения рассогласования UB и сигнала нелинейной
обратной связи производит переключение реле реверса 12 таким образом, что разгон двигателя .и его противовключение происходят по 0 птимальному закону.
Таким образом, точность работы предложенного привода повышена, так ка нереверсивный таходатчик не вносит запаздываний, а нелинейный элемент с одной ветвью обеспечивает идентичность отработки сигналов разного знака.
Предмет изобретения
1. Бесконтактный следящий лривод постоянного тока, -оптимальный по бы.стродействию, содержащий .последователыно соединеиные элемент срваиения, релейный элемент, блок умножения и двигатель, который через редуктор соединен с элементом сравнения, нелинейный элемент, тахогенератор, устаиовленный на валу двигателя, .и реле .peaeipca, вход которого подключен к выходу элемента сравнения.
а выход - ко входу блока умножения, отличающийся тем, что, € целью повышения точности работы привода, он содержит выпрямитель, оодключеилый к тахогенератору, .реле
и блок умножения, первый вход которого icoедиеен через нелинейный элемент с выпрямителем, второй через реле-с выходом элемента сравнения, а выход его подключен ко второму входу реле реверса.
2. Привод по п. 1, отличающийся тем, что тахогенератор выполнен си.нхролным.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1979 |
|
SU847275A1 |
| Бесконтактная следящая система постоянного тока | 1973 |
|
SU470783A1 |
| Следящая система | 1978 |
|
SU763851A1 |
| Бесконтактная следящая система постоянного тока | 1979 |
|
SU930238A2 |
| Следящая система | 1975 |
|
SU608119A1 |
| Бесконтактная следящая система постоянного тока | 1974 |
|
SU474787A1 |
| Следящая система | 1978 |
|
SU746408A1 |
| Следящая система | 1979 |
|
SU900255A1 |
| Следящая система | 1979 |
|
SU862114A1 |
| Бесконтактный следящий привод постоян-НОгО TOKA | 1979 |
|
SU853606A1 |
