1
Изобретение относится к системгйл автоматического регулирования и может использоваться в следящих системах различного назначения.
Известны фазовые следящие системы {l1, которые не обеспечивают высокой точности фиксации нулевой разности углов поворота задающего и отрабатывающего валов.
Наиболее близкой по технической сущности к изобретению является фазовая следящая система, содержащая два фазовращателя и последовательно соединенные фазовый дискриминатор, интегратор, усилитель мощности, электродвигатель и редуктор 2.
Эта система не содержит устройства для фиксации нулевой разности углов поворота задающего и обрабатывающего валов.
Цель изобретения - повышение точности фиксации нулевой разности углов поворота згщающего и отрабатывахяцего вгшов фазовой следящей систекы.
Поставленная цель достигается за счет введения в систему двух ждущих мультивибраторов, второго и третьего элементов И, элемента задержки ,и триггера, причем выход первого
элемента И подсоединен к первсжу входу триггера, входу первого ждущего мультивибратора и первому входу второго элемента И, второй вход которого соединен с выходом элемента задержки, а выход - через второй ждущих мультивибратор с первьм входом третьего злемента И, второй вход которого и вход элемента задержки
10 соединены с выходом первого ждущего мультивибратора, а выход - со вторым входом триггера, выход которого соединен с третьим входом усилителя
;МСКЦНОСТИ .
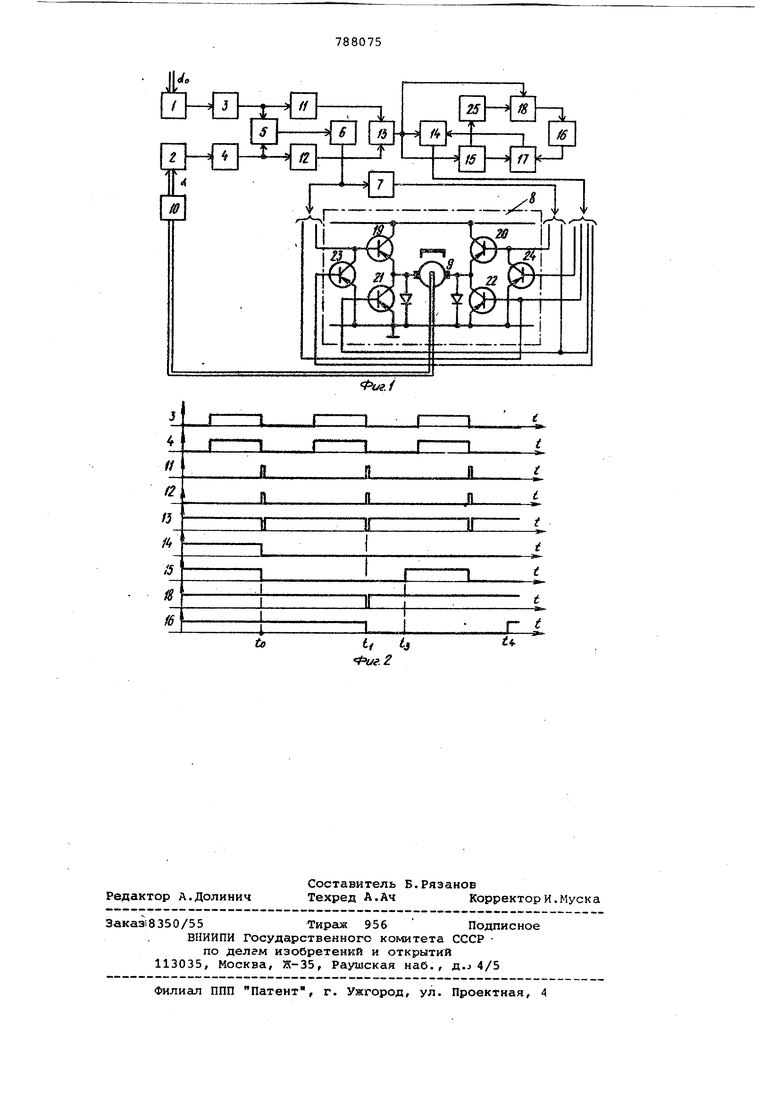
S На фиг. 1 изображена функциональная схема фазовой следящей системы; на фиг. 2 - временные диаграммы, пояснякяаие принцип ее действия в режиме фиксации нулевой разности углов поворота задающего и отрабатывающего валов.
Фазовая следящгш система состоит из фазовращателей 1 и 2, формирователей прямоугольных импульсов 3 и 4,
25 фазового дискрикинатора 5, интегратора 6, инвертора 7, усилителя 8 мощности,-электродвигателя 9, редуктора 10, формирователей 11 и 12 стробимпульсов, первого элемента
0 И 13, триггера 14, ждущих мультивибраторов 15 и 16, двух элементов И 1 и 18, транзисторов 19 и 20 эмиттерных повторителей, транзисторных ключей 21-24 и элемента 25 задержки Символами eio И сС обозначены соответственно углы поворота задающего и отрабатывающего валов. Цифры, помещенные слева от осей ординат на фиг. 2, обознача1бт графики сигналов на выходах соответствующих по номеру элементов схемы системы,. Функциональные связи между элементами 1-10 систе в являются традиционными для всех замкнутых авто матических систем. Элементы 1 и 3 представляют собой преобразователь эадакяцехх воздействия оС в значение фазового сдвига прямоугольного электрического сигнсша. Последовательно связанные элементы 5-10 образуют цепь прямой связи следящей система. Нагрузка присоединяется к выходу редуктора 10; Элементы 2 и 4 образуют цепь обратной связи системы. Вращение электродвигателя 9 в одном из возможных направлениг, осуществляется за счет работы одной из пар транзисторов: 19 и 22 или 21 и 20. Ключи 23 и 24 при этом разомкнуты. При вращении электродвигателя 9, управление парой транзисторов 19 и 22 (или 21 и 20) осуществляется элементами б и 7 прямой связи следящей системы. По окончании отработки рассогласования между значениями углов с, и с(- электродвигатель 9 затормаживается за счет однвременного замыкания ключей 21-24, управляемых от совокупности элементов 11-18 и 25, соединенных так, как показано на фиг..
Если отработка рассогласования меязду углами сзСо ® закончена, то стробимпульеы на выходах формиротелей 11 и 12 по времени не совпадают. На выходе первого элемента И 13 отсутствует управляющий импуль и выходное напряжение триггера 14 не участвует в логике управления электродвигателем 9, который получает управляющие воздействия из прямой связи следщдей систеьш. Ждущие мультивибраторы 15 и 16 также оказы ваются в незапущенном состоянии. Одинаковость значений из выходных сигналов через третий элемент И 17 триггер 14 удерживается в описанном выше исходном положении.
В момент окончания отработки рассогласования прямоугольные импульсы на выходах формирователей 3 и 4 совпадают по времени (фиг.2) с точностью до длительности стробимпульсов, вырабатывае1 ых формирователями 11 и 12. Судя по графикам, изображеннъзм на фиг. 2, в момент времени tjj впервые происходит совпадение стробимпульсов. На выходе первого элемента И 13 появляется импульс,
который одновременно переключает триггер 14 и запускает ждущий мультивибратор 15. Выходной сигнал триггера 14 нарушает логику управления электродвигателем 9, замкнув одновременно ключи 21 - 24. Это приводит к торможению электродвигателя 9. Выходной импульс первого элемента И 13 не может одновременно запустить ждущий мультивибратор 16, так как в исходном состоянии ждущий мультивибратор 15 своим выходным сигнсшом через элемент 25 задержки запрещает прохождение управляющих импульсов на вход мультивибратора 16 посредством запирания второго элемента И 18. Запрет на второго элемента И 18 снимается позже запуска мультивибратора 15. Время запаздывания превышает длительность выходного импульса первого элемента И 13 и определяется парс1метрами элемента 25 задержки.
Предлагаемая фазовая следящая система является импульсной системой, так как фазовый дискриминатор 5 формирует импульсы ошибки регулирования на входе интегратора б с периодом частоты напряжения питания фазовращателей 1 и 2. Система замкнута только в моменты появления этих имрульсов. Во время их отсутствия система разомкнута и не получает информации о значении угла cL поворота отрабатывающего вала. Вблизи положения согласования валов выходной сигнал фазового дискриминатора 5 становится очень малым. При этом целесообразно осуществлять управление электродвигателем 9 по импульсам на выходе первого элемента И 13. Если стробимпульеы совпадгиот по времени, то целесообразно удерживать электродвигатель 9 в заторможенном состоянии. Если стробимпульеы не совпадают по времени , то следует разрешить отработку рассогласования замкнутому контуру системы. Значит длительность стробимпульсов определяет точность всей следящей системы.
Но информация о совпадении стробимпульсов (или об их расхождении) в импульсной следящей системе поступает через период напряжения питания фазовращателей 1 и 2. Поэтому ждущие мультивибраторы 15 и 16 формируют импульсы по длительности превышгиовдие один период (но меньше двух периодов) этого напряжения. При этом ждущие мультивибраторы 15 и 16 как бы передают один другому информацию о наличии стробимпульсов, удерживая электродвигатель 9 в заторможенном состоянии. В рассматриваемом случае (фиг.2) импульс ждущего мультивибратора 15 оканчивается только в момент времени t-j. Второй стробимпульс появляется на выходе первого элемента И 13 в момент времени t и поступает на вход мультивибратора 15, но изменить состояния последнего не може так как формирование выходного импульса еще не закончено. Второй же элемент И 18 к моменту времени t готов к срабатыванию и пропускает в момент времени t стробимпульс на вход мультивибратора 16, который за пускается и оканчивает формирование своего выходного импульса в момент времени Гд Во время поочередной работы мультивибраторов 15 и 16 (с перекрытием по времени) схема совп4 дения 17 не формирует управляющего сигнала на возврат триггера 14 в исходное состояние. Так как третий стробимпульс (фиг приходит позже момента времени t, то мультивибратор 15 снова запускается. Если третий стробимпульс не появляется на выходе первого элемен та И 13, то в момент времени t выходные сигналы мультивибраторов 15 и 16 оказываются одноименными и такими, что на выходе третьего элемента И 17 появляется сигнал, который вернет триггер 14 в исходное по ложение . В результате этого управле ние электродвигателем 9 передается згих1киутому контуру следящей система Логическое устройство передачи , информации о совпадении стробимпуль сов реализовано на интегральных микросхемах серии К155, при длительности стробимпульсов 1 мксек. ilorpeuHOCTb отработки рассогласования при постоянных значениях угла d J условиях отсутствия внешнего нагр ючного момента на вгшу электродви ателя не превьвиает 2 угловых мин. ффективность предложенной система (аключается в достижении высокой сочности отработки рассогласования с помсхцью простых элементов, работги щих по принципу да - нет. Допол нительным положительным эффектом является то, что по окончании отработки рассогласования электродвигатель заторможен и полностью отключен от источника питания. В системе (Имеется электрический сигнал постоянного тока, указывающий ка окончание отработки рассогласования. Формула изобретения Фазовая следящая система, содержащая две параллельные цепи, состоящие из последовательно соединенных фазовращателя, формирователя прямоугольных импульсов, формирователя стробимпульсов, выходы которых подключены ко входам первого элемента И, и последовательно соединенные фазовый дискриминатор, интегратор, выход которого непосредственно и через инвертор подключен ко входам усилителя мощности, выход которого подсоединен к электродвигателю, связанному черзз редуктор со входом одного фазовращателя, а вход другого фазовращателя подключен к задающему входу системы, отличающаяся тем, что, с целью повышения точности системы, в не« введены два ждущих мультивибратора, второй и третий элементы И, элемент задержки и триггер, причем выход первого элемента И подсоединен к первому входу триггера, входу первого ждущего мультивибратора и первому входу второго элемента И, второй вход которого соединен с выходом элемента згщержки, а выход через второй ждущий мультивибратор с первым входом третьего элемента И, второй вход которого и вход элемента задержки соединены с выходом первого ждущего мультивибратора, а выход со вторым входом триггера, выход которого соединен с третьим входом усилителя мощности. Источники информации, принятые во внимание при экспертизе j 1. Бычатин Д.А., Гольдман И.Я. Поворотный индуктосин. Л., Энергия, библиотека по автоматике, вып. 351, 1969,, с. 15. 2. Ахметжанов А.А. Высокоточные системы передачи у-гла автоматических устройств. М., Энергия, 1975, с. 192 (прототип).
11
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1988 |
|
SU1571547A1 |
| Устройство для управления электродвигателем позиционного электропривода | 1985 |
|
SU1307523A1 |
| Цифро-аналоговая следящая система | 1978 |
|
SU750434A1 |
| Фотоэлектрическое следящее устройство | 1978 |
|
SU746447A1 |
| Электропривод | 1987 |
|
SU1453569A1 |
| Стробоскопический измеритель временных интервалов | 1980 |
|
SU972471A1 |
| Устройство для контроля параметров двигателя внутреннего сгорания | 1983 |
|
SU1138684A1 |
| Цифровая следящая система | 1977 |
|
SU682872A1 |
| Цифроаналоговая следящая система | 1986 |
|
SU1405025A1 |
| Цифровая следящая система | 1987 |
|
SU1797093A1 |
to
it t-i Puf.Z
