1
Изобретение относится к устройствам ударного действия и может быть использовано в качестве механизированного инструмента в горных и
. строительных работах, для разработки мерзлых грунтов и скальных
. пород.
Известны машины ударного действия, в которых накопление кинетической энергии бойка происходит по круговой траектории за сотни и тысячи оборотов fl .
Недостатки машин - малый путь разгона бойка, смещение бойка, относительно инструмента при соударении, ручная перезарядка перед ударом, отсутствие автоматического регулирования частоты и энергии
.удара машины в процессе ее работы. Наиболее близкой по технической сущности к изобретению является машина ударного действия, содержащая привод, корпус, размещенные в нем рабочий орган, связанный с приводом, вал с роторными балками, установленный на них ударник, периодически взаимодействующий с рабочим органом, регулятор и механизм точного вывода ударника, с подпружийенным фиксатором Г2 ,
Однако и эта машина обладает малой производительностью.
Цель изобретения - повышение производительности машины ударного действия.
Это достигается тем, что машина ударного действия снабжена механизмом автоматического регулирования параметров удара, установленным со-.
О осно с рабочим органом и связанным с фиксатором, который выполнен в виде храповика, размещенного на оси вращения ударника.
Кроме того, механизм автоматичес S кого регулирования параметров удара выполнен в виде динамометра, связанного с механизмом точного вывода ударника системой рычагов или посредством гидропривода.
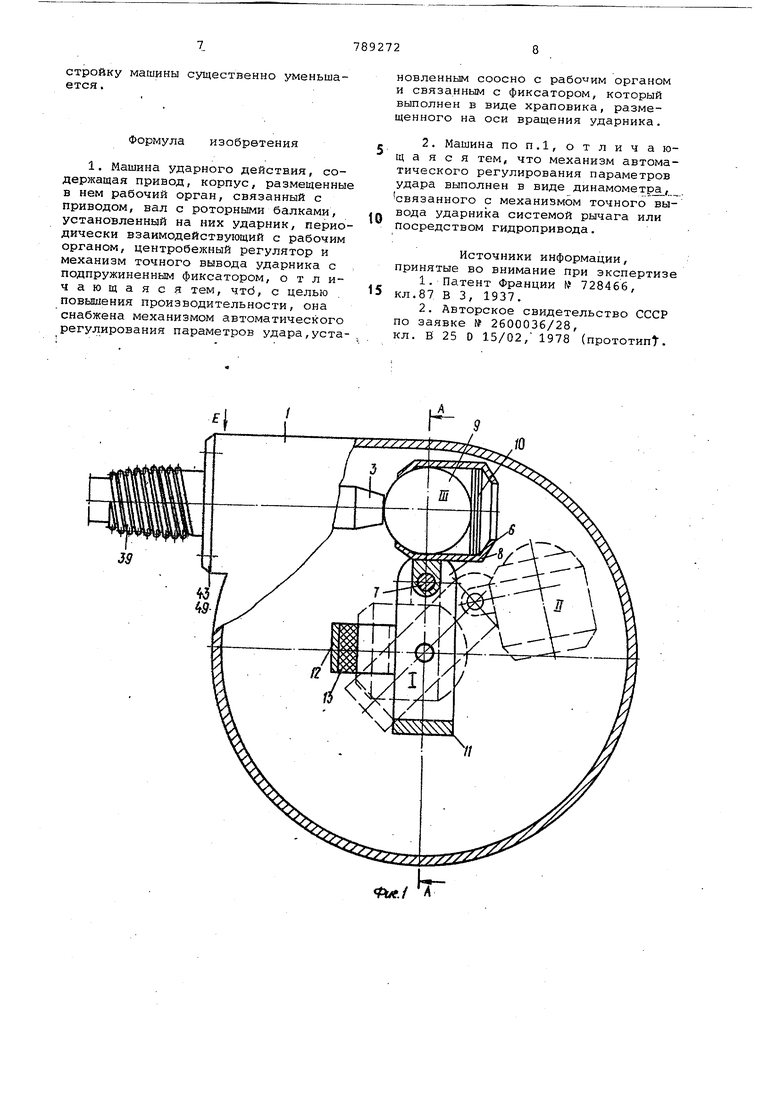
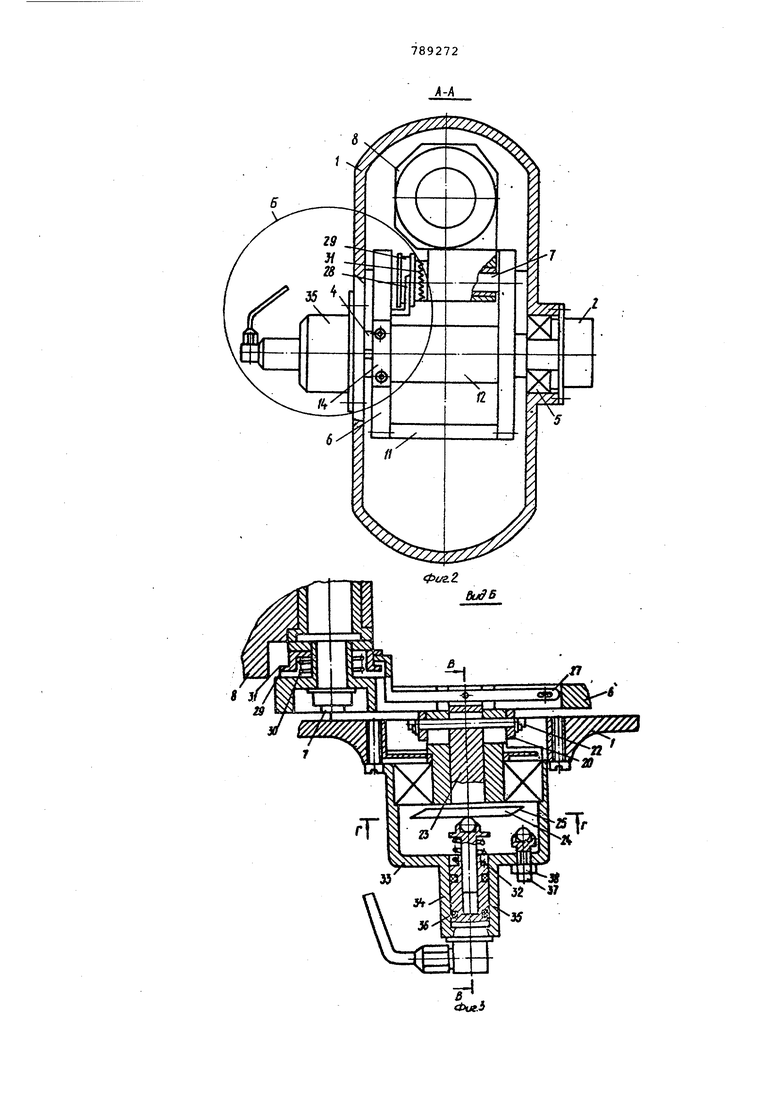
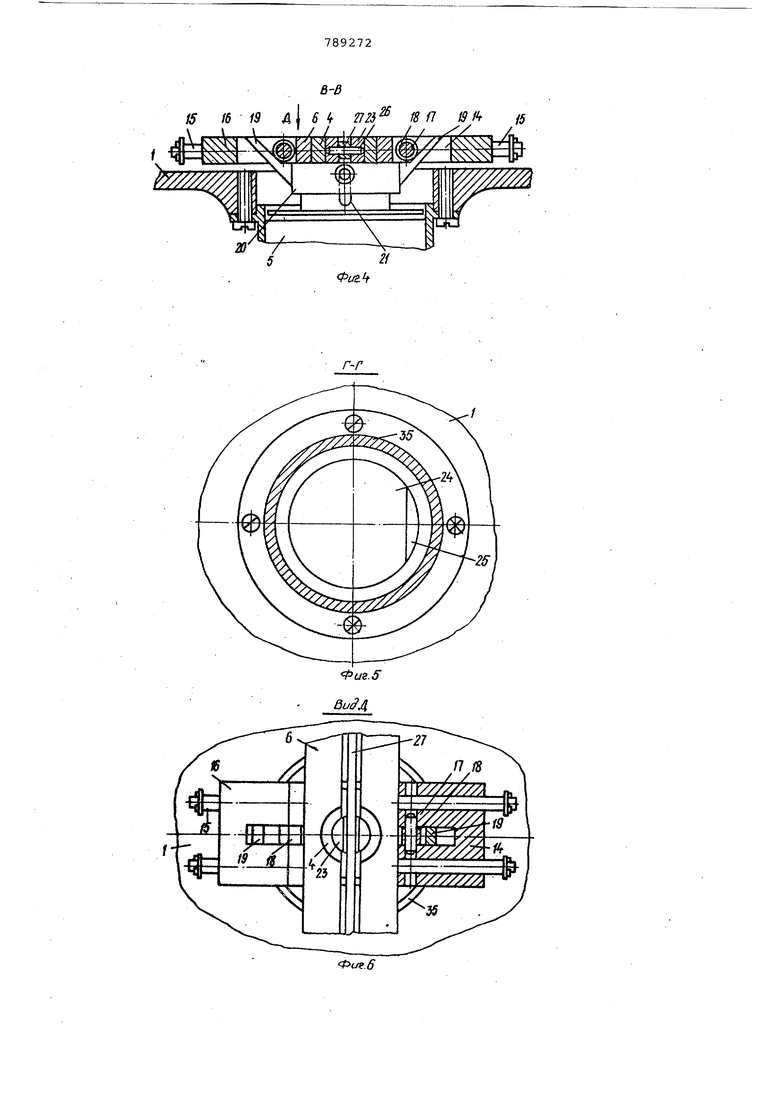
20 На фиг.1 изображена машина ударного действия, продольный разрез; на фиг.2 - разрез А-А на фиг.1; на фиГ.Звид Б на фиг.2; на фиг.4 - разрез В-В на фиг.З; на фиг.5 - разрез Г-Г
25 на фиг.З; на фиг.6 - вид Д на фиг.4; на фиг.7 - вид Е на фиг.1 (автоматического регулирования параметров удара с рычажной связью); на фиг.8 - вид Е на фиг.1, то же с гидравлической
30 связью. Maimjua ударного действия содержи корпус 1, соединенный с ним.приводи рабочийорган 3. Привод 2 через муфту (не показана) соединен с валом 4, вращающимся в опорах 5, с установленными на нем двумя роторным балками б, на одном конце которых расположен вал 7 с подвижно закреп, ленным на нем ударником 8, внутри которого помещены боек 9 и демпфирующий элемент 10. На другом конце роторных балок б установлена поперечина 11, уравновешивающая роторные балки б и вал 7 при вращении ротора (фиг.2).В середине роторных балок 6 установлен амортизатор 12, содержащий упругий элемент 13 (фиг. 1. и 2) . Соосно с валом 4,расположен механиэ точного вывода ударника, вы, полненный следующим образом: перпен дикулярно роторным балкам б и оси вращения ротора установлен центробежный регулятор 14 (фиг. 2, 4 и б) состоящий из штоков 15, грузов 16, осей 17 и роликов 18, находящихся в постоянном контакте с копирами 19 втулки 20, установленной на валу 4 с возможностью поступательного движения. Поперек вала 4 с возможность поступательного движения по пазам 21 установлен стержень 22, соединяющий ползун 23 с втулкой 20 (фиг.З) На одном конце ползуна 23 расположен копир 24, выполненный в виде ди .ка со скосом 25 (фиг.З и 5), а другой скос служит для динамической ба лансировки копира 24 при вращении ротора. К другому концу ползуна 23 осью 26 крепится рычаг 27, один конец которого фиксируется в подвижной опоре, а другой выполнен в виде вилки 28 (фиг.2) , находящейся в контакте с фиксатором в виде храповика , состоящего из храповой полумуфты 29 (фиг.2 и 3), которая поджи мается пружиной 30 к другой храповой полумуфте 31, запресованной в корпус ударнлка 8. Пружина 30 выпол нена из профиля прямоугольного сече ния таким образом, что на сжатие он работает на два порядка слабее, чем на кручение, Прижуина 30 жестко сое динена с роторной балкой б одним св им концом с храповой полумуфтой 29 другим концом. Копир 24 с ползуном 23 подпружинены (фиг.З) пружиной 32 упора 33, выполненного с шаровой опорой. Пружина 32 установлена между буртом упора 33 и плунжером 34, имеющим возможность поступательного двилсения относительно корпуса 35 ме низма точного вывода ударника (фиг. В плунжере 34 имеются канавки для размещения уплотнительных колец 36. На корпуса 35 механизма точного вывода ударника установлен упор 37 (фиг.З), -выполненный со сферической опорной поверхностью. Гайка 38 пред назначена для законтривания упора 37 в процессе его регулировки по высоте (фиг.3). Плунжер 34 механизма точного вывода ударника связан с динамометром механизма автоматического регулирования параметров удара посредством системы рычагов (фиг. 7) или гидропривода (фиг.8). Механизм автоматического регулирования параметров удара с рычажной связью (фиг.7) выполнен в виде динамометра, состоящего из рабочего органа 3, пружины 39, опорного корпуса 40, упругого элемента 41, фаски 42, кожуха 43, и рычажной связи с плунжером 34, состоящей из втулки 44 с роликом 45, опоры 46 с осью и рычага 48. Механизм автоматического регулирования параметров удара с гидроприводом (фиг.8) выполнен в виде динамометра, состоящего из рабочего органа 3, опорного конуса 40, упругого элемента 41, фаски 42, корпуса 49, бурта 50 и гидравлической связи с плунжером 34, состоящей из цилиндра 51, поршня 52 с уплотнениями 53 и соединительной арматуры 54. Рабочая среда - масло подается под поршень 52 с некоторым давлением (2 атм). Манометр вынесен на контрольный щиток оператора. Машина ударного действия работает следующим образом. В начальный момент ударник 8 находится в положении I (фиг.1), зафиксированный храповыми полумуфтами 29 и 31. Обе полумуфты поджаты одна к другой пружиной 30 и пружиной 32, действующей на храповую полумуфту 29 через упор 33, копир 24, ползун 23, ось 26, рычаг 27 и вилку 28 (фиг.З). Упругий элемент 41 динамометра механизма автоматического регулирования параметров машины находится в свободном состоянии. Оператор включает устройство подачч (не показано) и,когда рабочий орган 3 машины коснется грунта или породы, включает привод 2 машины. При внедрении в грунт или породу рабочего органа 3 механизм автоматического регулирования параметров удара с рычажной связью (фиг.7) работает следующим образом: рабочий орган 3, смещаясь внутрь корпуса 1 машины, своей фаской 42 воздействует через втулку 44 с роликом 45 на упругий элемент 41. В зависимости от твердости грунта и усилия подачи рабочий орган 3 будет испытывать различное сопротивление, по-разному сжимая упругий элемент 41 и сдвигая втулку 44 с роликом 45 внутрь корпуса 1 машины. При этом под действием ролика 45 малое плечо рычага 48, а большое его плечо поднимается, вдви гая плунжер 34 внутрь корпуса 35. Механизм автоматического регулирования параметров удара с гидравли ческой связью (фиг.8)при внедрении рабочего органа 3 в грунт или породу работает следующим образом: рабо чий орган 3 смещаясь внутрь корпуса 1 машины, своей фаской 42 воздействует на поршень 52, сжимая при этом буртом 50 упругий элемент 41. В зависимости от твердости грунта и усилия подачи рабочий орган 3 будет испытывать различное сопротивление, по разному сжимая при этом упругий элемент 41 и сдвигая поршень 52 внутрь корпуса машины. Поршень 52, вьадавливая масло под плунжер 34, выну}кдает его перемещаться внутрь корпуса 35 механизма точного вывода ударника (фиг.8). Гидропривод в этом случае работает как система сообщающихся сосудов с постоян ным объемом рабочего тела, которое вьщавливается одним поршнем 52 под другой поршень - плунжер 34 . Таким образс 1, в зависимости от величины поджатия рабочего органа 3 к разрабатываемой машиной среде и от твердости среды наблюдается различное по величине перемещение плунжера 34 внутрь корпуса 35 механизма точного вывода ударника. Сжатие пружины 32 упора 33 при этом изменяется. « При включении оператором привода , 2 машины ротор ее начинает разгоняться. Грузы 16 центробежного регулятора 14 начинают расходиться, преодолевая сопротивление пружины 32 упора 33. Рол«ки 18, воздействуя на копиры 19, двигают по пазам 21 (фиг.3 и 4) втулку 20 со стержнем 22 и с ползуном 23 до тех пор, пока копир 24 не станет взаимодействовать со сферой упора 37. Движение ползуна 23 вниз фйг.З сопровождается смещением вилки 28 рычага 27 в том же направлении и частичным отводом храповой полумуфты 29от храповой полумуфты 31. При дальнейшем расхождении грузо 16 центробежного регулятора 14, упо 37 начинает контактировать своей сф рой со скосом копира 24, который пр этом начинает совершать возвратно-п ступательные движения, вынуждая колебаться ползун 23, ось 26, рычаг 27 и его вилку 28. Высота сферы упо ра 37 отрегулирована так, что при контакте ее со срезом 25 копира 24 происходит расцепление храповых полумуфт 31 и 29. Ударник 8 получает возможность свободного вращения и п действием центробежной силы выходит из положения I в положение П, а затем в положение Ш, производя удар п рабочему органу 3 (фиг.1). При ударе, вследствие большой потери кинетической энергии, ротор машины приостанавливается, а грузы 16 центробежного регулятора 14 сходятся под действием сжатой ими пружины 32 упора 33, давление которой через ползун 23, стержень 22 и втулку 20 передается на копиры 19 и ролики 18 (фиг;3, 4 и 6). Ползун 23, поднимаясь фиг.З , сдвигает вилку 28 рычага 27 вверх. Храповая полумуфта 29 поджимается при этом к полумуфте 31. После удара о рабочий орган 3, ударник 8 отскакивает, поворачиваясь вокруг вала 7, и фиксируется храповыми полумуфтами 29 и 31 в любом крайнем положении. При прощелкивании храповых полумуфт 29 и 31 перемещение храповой полумуфты 29 от положения фиксирования вызывает поворот рычага 27 и опускание копира 24на сферу упора 37. Удара среза 25копира 24 о сферу упора 37 не произойдет так как вилка 28 рычага 27 посажена в канавку храповой полумуфты 29 с зазорсм (фиг.2 и 3). При больших скоростях ударов отскок ударника 8 от рабочего органа 3 демпфируется упругим элементом 13(фиг.1) амортизатора 12. Обратный отскок ударника 8 от амортизатора 12 демпфируется пружиной 30, работающей в этом случае на кручение. От положения плунжера 34 зависит усилие сжатия пружины 32 упора33. Чем больше усилие сжатия пружины 32, тем большую скорость должен развивать ротор, чтобы центробежный регулятор 14мог расцепить храповые полумуфты 29 и 31 и расфиксировать ударник 8. Смещение же плунжера 34 зависит от твердости разрабатываемого машиной грунта и от силы цоджатня к нему рабочего органа 3. Следует отметить, что при свободном состоянии пружины 32 упора 33 частота ударов машины наибольшая один удар за один оборот ротора, а энергия удара наименьшая,так как ротор за один оборот не развивает высокой скорости. При сжатии пружины 32 упора 33 частота ударов уменьшается, а энергия ударов увеличивается, так как ротору необходимо развить более высокую скорость для преодоления усилия сжатия пружины 32 центробежным регулятором 14. Предлагаемый механизм автоматического регулирования параметров удара позволяет .автоматически изменить режим работы машины в зависимости от поджатия рабочего органа к разрабатываемой среде и от ее твердости.Производительность машины возрастает, так как участие человека в управлении такой машиной сводится почти на нет, и поэтому время на перенастройку машины существенно уменьшается.
Формула изобретения
1. Машина ударного действия, содержащая привод, корпус, размещенные в нем рабочий орган, связанный с приводом, вал с роторными балками, установленный на них ударник, периодически взаимодействующий с рабочим органом, центробежный регулятор и механизм точного вывода ударника с подпружиненным фиксатором, отличающаяся тем, 4TcS, с целью . повышения производительности, она снабжена механизмом автоматического регулирования параметров удара,установленным соосно с рабочим органом и связанным с фиксатором, который выполнен в виде храповика, размещенного на оси вращения ударника.
2. Машина поп.1,отличающ а я с я тем, что механизм автоматического регулирования параметров удара выполнен в виде динамометра, связанного с механизмом точного вывода ударника системой рычага или посредством гидропривода.
Источники информации, принятые во внимание при экспертизе
1.Патент Франции № 728466, КЛ.87 В 3, 1937.
2.Авторское свидетельство СССР по заявке № 2600036/28,
кл. В 25 О 15/02, 1978 (прототип 
| название | год | авторы | номер документа |
|---|---|---|---|
| Машина ударного действия | 1990 |
|
SU1798167A1 |
| Машина ударного действия | 1979 |
|
SU903103A1 |
| Машина ударного действия | 1978 |
|
SU747714A1 |
| Машина ударного действия | 1978 |
|
SU872244A2 |
| Транспортно-технологический ротор | 1988 |
|
SU1586795A1 |
| Машина ударного действия | 1979 |
|
SU848344A1 |
| Пневматический гайковерт | 1990 |
|
SU1752535A1 |
| Машина ударного действия | 1981 |
|
SU992179A1 |
| Г. М. РЫБКИН и В. Т. ЧиликовВсесоюзный научно-исследовательский инструментальный институт | 1970 |
|
SU282010A1 |
| Ударно-импульсный механизм | 1985 |
|
SU1349991A2 |

А./ л «-Л
15 (6 IS Л 6
/ /
f8 Л idfr / Х
