I
Изобретение относится к области неразрушаю1П€го контроля изделий и может быть использовано в любой отрасли мащиностроения, в частности при контроле листов большой толщины, идущих на изготовление сосудов высокого давления.
При контроле толстостенных .изделий актуальной задачей является выявление разноориентированных дефектов .
Известно многоэлементное акустическое устройство для контроля качества сварных соединений, содержащее локальную ванну, корпус, внутри которого на оси двигателя закреплена обойма. Па обойме, ось вращения которой перпендикулярна рабочей поверхности устройства, установлены наклонные призматические искатели с различными углами наклона, а по центру - нормальный искатель 1 .
Недостатком устройства является то, что для реализации метода качающегося луча использована система вращающихся искателей. Многоэлементность их усложняет контроль и снижает его надежность, изменение угла ввода ультразвуковых колебаний осуществляется дискретно, а не плавно.
Кроме того, при вращении обоймы с искателями контактная жидкость отбрасывается к периферии локальной ванны, для создания надежности акустичес5 кого контакта требуется значительное увеличение расхода контактной жидкости.
Наиболее близким к предлагаемому по технической сущности является
to ультразвуковой преобразователь с локальной камерой, содержащий корпус и размещенные в нем пьезопластину и механизм изменения ее положения 2 . Недостатком данного преобразователя является низкая производительность из-за ручного изменения угла ввода ультразвуковых колебаний.
Цель изобретения - автоматизация изменения угла ввода ультразвуковых
20 колебаний.
Поставленная цель достигается тем, что механизм изменения положения Пьезопластин выполнен в виде электродвигателя и кинетически связанных с
25 ним двух редукторов, выходной вал одного из которых соединен посредством сферического шарнира с центром пъезопластины, а второй редуктор имеет жестко закрепленную на ег,о
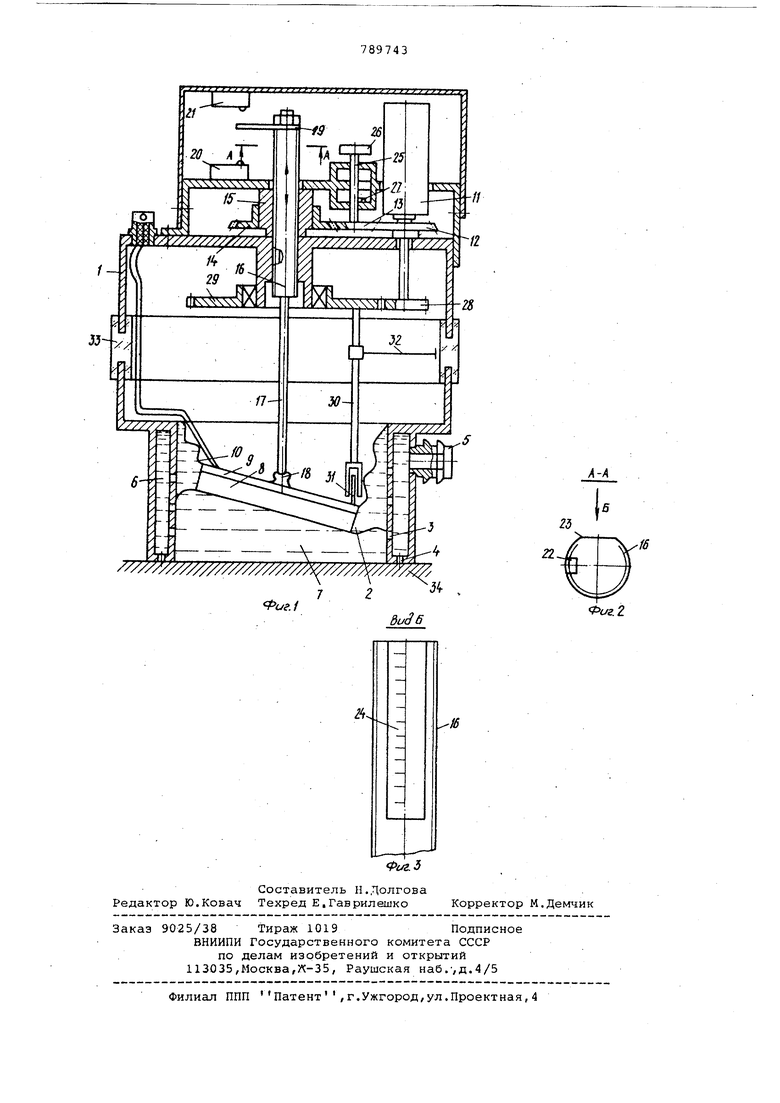
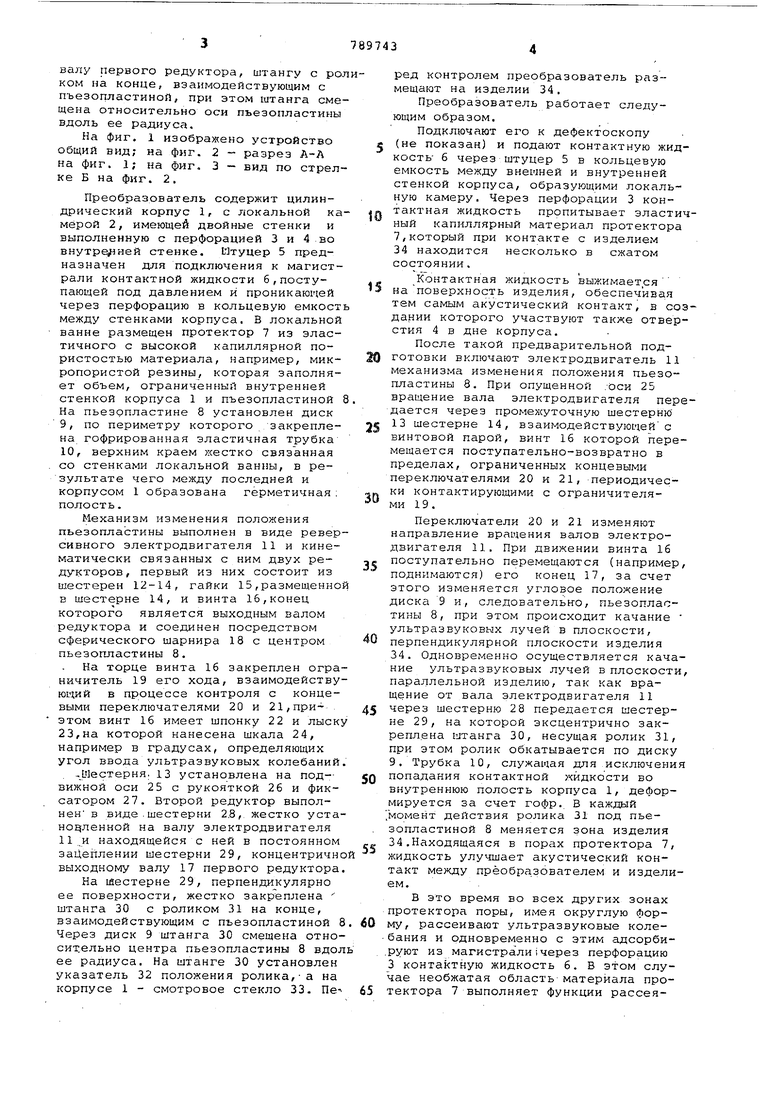
30 шестерне, концентричной выходному валу первого редуктора, штангу с ро ком на конце, взаимодействующим с пъезопластиноП, при этом штанга сме щена относительно оси пьезопластины вдоль ее радиуса. На фиг. 1 изображено устройство общий вид; на фиг. 2 -- разрез А-Л на фиг. 1; на фиг, 3 - вид по стрелке Б на фиг. 2, Преобразователь содержит цилиндрический корпус 1г с локальной ка мерой 2, имеющей двойные стенки и выполненную с перфорацией 3 и 4 во внyтpe нeй стенке. Итуцер 5 предназначен для подключения к магистрали контактной жидкости 6,поступающей под давлением и проникаю1чей через перфорацию в кольцевую емкост между стенками корпуса. В локальной ванне размещен протектор 7 из эластичного с высокой капиллярной пористостью материала, например, микропористой резины, которая заполняет объем, ограниченный внутренней стенкой корпуса 1 и пъезопластиной На пьеэопластине 8 установлен диск 9, по периметру которого закреплена гофрированная эластичная трубка 10, верхним краем жестко связанная . со стенками локальной ванны, в результате чего между последней и корпусом 1 образована герметичная ; полость. Механизм изменения положения пьезопластины выполнен в виде ревер сивного электродвигателя 11 и кинематически связанных с ним двух редукторов, первый из них состоит из шестерен 12-14, гайки 15,размещенно в шестерне 14, и винта 16,конец которого является выходным валом редуктора и соединен посредством сферического шарнира 18с центром пьезопластины 8. На торце винта 16 закреплен огра ничитель 19 его хода, взаимодейству ющий в процессе контроля с концевыми переключателями 20 и 21,при этом винт 16 имеет шпонку 22 и лыск 23,на которой нанесена шкала 24, например в градусах, определяющих угол ввода ультразвуковых колебаний -Шестерня. 13 установлена на под- вижной оси 25 с рукояткой 26 и фиксатором 27. Второй редуктор выполнен в виде .шестерни 2.8,, жестко уста нод ленной на валу электродвигателя 11 и находящейся с ней в постоянном зацеплении шестерни 29, концентричн выходному валу 17 первого редуктора На шестерне 29, перпендикулярно ее поверхности, жестко закреплена штанга 30 с роликом 31 на конце, взаимодействующим с пъезопластиной Через диск 9 штанга 30 смещена отно сит.ельно центра пьезопластины В вдо ее радиуса. На штанге 30 установлен указатель 32 положения ролика,-а на корпусе 1 - смотровое стекло 33. Пе ред контролем преобразователь размещают на изделии 34, Преобразователь работает следующим образом. Подключают его к дефектоскопу (не показан) и подают контактную жидкость- 6 через штуцер 5 в кольцевую емкость между внешней и внутренней стенкой корпуса, образующими локальную камеру. Через перфорации 3 контактная жидкость пропитывает эластичный капиллярный материал протектора 7,который при контакте с изделием 34 находится несколько в сжатом состоянии. Контактная жидкость выжимается на поверхность изделия, обеспечивая тем самым акустический контакт, в создании которого участвуют также отверстия 4 в дне корпуса. После такой предварительной подготовки включают электродвигатель 11 механизма изменения положения пьезопластины 8. При опущенной .оси 25 вращение вала электродвигателя передается через промежуточную шестерню 13 шестерне 14, взаимодействующей с винтовой парой, винт 16 которой перемещается поступательно-возвратно в пределах, ограниченных концевыми переключателями 20 и 21, периодически контактирующими с ограничителями 19. Переключатели 20 и 21 изменяют направление вращения валов электродвигателя 11. При движении винта 16 поступательно перемещаются (например, поднимаются) его конец 17, за счет этого изменяется угловое положение диска 9 и, следователько, пьезопластины 8, при этом происходит качание ультразвуковых лучей в плоскости, перпендикулярной плоскости изделия 34, Одновременно осуществляется качание ультразвуковых лучей в плоскости, параллельной изделию, так как вращение от вала электродвигателя 11 через шестерню 28 передается шестерне 29, на которой эксцентрично закреплена штанга 30, несущая ролик 31, при этом ролик обкатывается по диску 9, Трубка 10, служащая для исключения попадания контактной жидкости во внутреннюю полость корпуса 1, деформируется за счет гофр, В каждый .момент действия ролика 31 под пьезопластиной 8 меняется зона изделия 34.Находящаяся в порах протектора 7, жидкость улучшает акустический контакт между прёобра.зователем и изделием. В это время во всех других зонах протектора поры, имея округлую форму, рассеивают ультразвуковые колебания и одновременно с этим адсорби.руют из магистралиiчерез перфорацию 3 контактную жидкость 6. В этом случае необжатая область материала протектора 7 выполняет функции рассеяния ультраав ка; ультразвуковой ловушки, так что преломленные/ультразвуковые лучи на границе раздела протектор-поверхность контролируемого изделия, не попадают в качестве акустической помехи на пьезопластину работающую в этот момент времени в рёжиме приема колебаний.Кроме того, преобразователь в этой зоне не излучает в изделие ультразвуковые колебания, что позволяет исключить, ложрш отражения от конструктивных элементов локальной ванны. ,Для слежения за роликом 31 служит указатель 32 и смотровое стекло 33.
Преобразователь работает. в автоматическом режиме.
При необходимости повторного контроля с фиксированным углом ввода ультразвуковых колебаний,рукоятку 26 поднимают вертикально вверх и фиксируют с помощью фиксатора 27, при этом ось 25 с жестко связанной с ней промехсуточной шестерней 13 поднимается и шестерня 12 выходит из зацепления с шестерней 14.
В этом случае уголнаклона преобразователя остается постоянным. Угол наклона отмечают на шкале 24, нанесенной на винте 16, который перемещается поступательно благодаря шпонке 22..
ПреобЕэазователь позволяет повысит прюизводительность выявления разноориентированных дефектов в процессе челночного сканирования при сравнительно простой конструкции и удобств ее использования.
Автоматизация качания ультразвуковых лучей в двух взаимно перпендикулярных плоскостях обеспечена здесь при наличии только одногопреобразователя и без его вращения.Возможf ность /раздельной работы механизмов обеспечивает необходимые варианты контроля.
Формула изобретения
0 Ультразвуковой преобразователь с локальной камерой, содержащий корпус и размещенные в нем пьезопластину и механизм изменения ее положения,о т личающийся тем,что,с целью
5 автоматизации изменения угла ввода ультразвуковых колебаний,механизм из менения положения пьезопластины выполнен Б виде электродвигателя и кинетически .Связанных с ним двух редукторов, выгодной вал одного из кото0рых соединен посредством сферического шарнира с центром пьезопластины, а второй ре дуктор, имеет жестко закрепленную а его шестерне, концентрич,ной выходному валу первого редукто5ра, штангу с роликом на конце,взаймбдействующим с пьезопластиыой, при этом шТанга смещена относительно центipa пьезопластины вдоль ее радиуса. . Источники информации,
0 принятые во внимание при экспертизе
1. Авторское свидетельство СССР 406156, кл. G 01 П 29/04, 1974. , 2. Авторское свидетельство СССР W 139138, кл. G 01 М 29/04,1961
5 (прототип).
////Z /y/ W//////
иг.1
К-К
J
Фиг. 2
&иЗб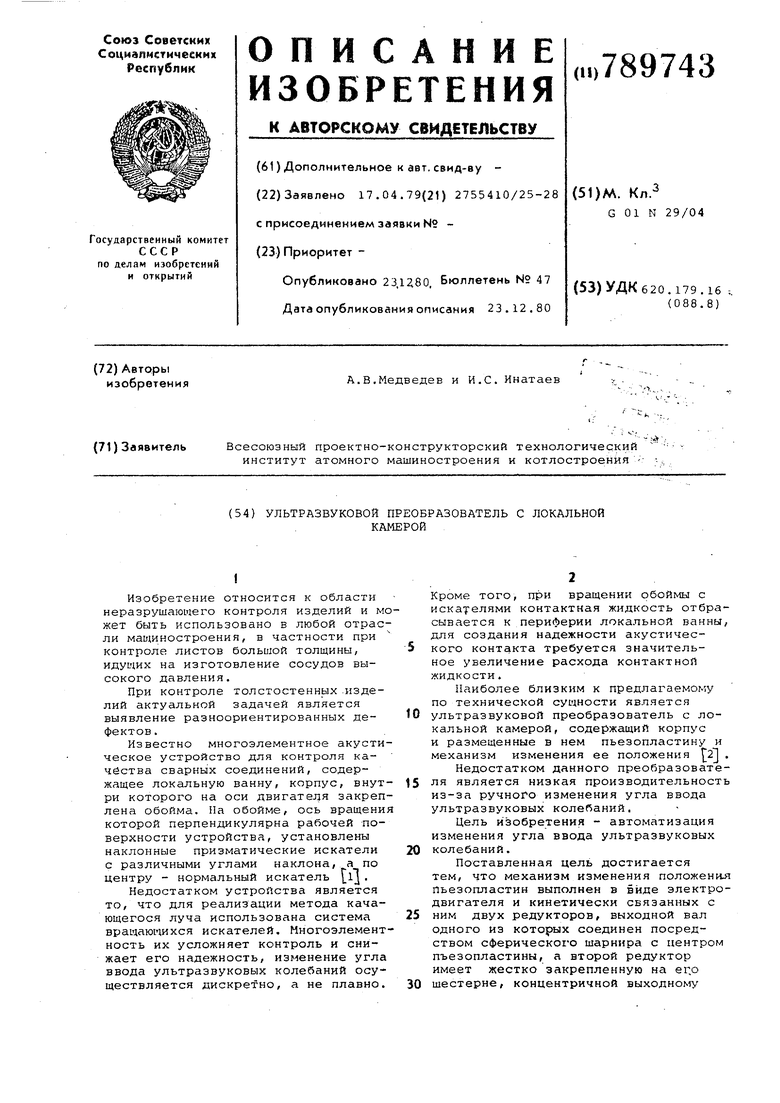
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для ультразвукового контроля изделий | 1990 |
|
SU1755174A1 |
| Устройство для ультразвукового контроля изделий | 1982 |
|
SU1027607A1 |
| Искатель для ультразвуковой дефектоскопии | 1976 |
|
SU575564A1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ПОВЕРХНОСТНЫХ ВОЛН И СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ | 2013 |
|
RU2520950C1 |
| Устройство для ультразвуковой дефекто-СКОпии | 1977 |
|
SU836578A1 |
| Ультразвуковой искатель для контроля качества изделий | 1982 |
|
SU1067433A1 |
| Установка для ультразвуковой дефектоскопии круглого проката или труб в процессе их производства | 1990 |
|
SU1728788A1 |
| Устройство для ультразвукового контроля изделий | 1990 |
|
SU1781598A1 |
| УСТАНОВКА ИЗМЕРИТЕЛЬНАЯ УЛЬТРАЗВУКОВАЯ И МЕХАНОАКУСТИЧЕСКИЙ БЛОК ДЛЯ НЕЕ | 2007 |
|
RU2351926C2 |
| Многоканальный ультразвуковой искатель | 1976 |
|
SU737826A1 |