перемещаемых с помощью координатных кареток 19 и 20. Проекционные марки выполнены в виде нанесенных на стеклянные пластины вертикальных штрихов и расположены на координатных каретках 15 и 16, перемещающихся по оси Х, Экран 6 содержит столик, на котором размещены марки, отвес, цилиндрический уровень и фотоприемник с цифровой индикацией на табло. Он служит для получения видимого изображения линии засечки и последующего ортогонального переноса ее геометрической оси на :местность. Ориентирование устройства на местности производится с помощью
1
Изобретение относится к геодезии, а именно к способам и техническим средствам, используемым при геодезической подготовке и выносе в натуру проектного положения точек инженер- ных сооружений.
Цель изобретения - расширение функциональных возможностей устройства путем обеспечения выноса в натуру любых элементов инженерных сооружений
На фиг.1 приведена оптико-кинемат-и ческая схема устройства для разбивоч- ных работ в строительстве; на фиг.2 - экран, общий вид; на фиг.З - оптическая схема проецирования.
Устройство для разбивочньк работ в строительстве (фиг.1) содержит две проекционные камеры 1 и 2, основание с осью 4, визирное устройство 5 и экран 6.
Проекционные камеры 1 и 2, оси про ещ1рования которых горизонтальны, аналогичны одна другой, установлены неподвижно на общем основании 3 и состоят из источников света 7 и 8 с конденсорами 9 и 10, объективов 11 и 12 и проекционных марок 13 и 14.Источники света 7 и 8 с конденсорам - 9 и 10 и проекционные марки 13 и 14 расположены на координа гных каретках 15 и 16 с микрометренными винтами 17 и 18. Для перемещения объективов 11 и 12 служат координатные каретки 19 и 20 с микрометренными винтами 21 и 22 Проекционные марки 13 и 14 выполнены
визирного устройства 5, представляющего собой зрительную трубу, расположенную параллельно базису в одной вертикальной плоскости. Два цилиндрических уровня 31 и 32 с взаимно перпендикулярными осями служат для приведения основания 3 в горизонтальное положение с помощью винтов 28,29 и 30 подъемного устройства. Механизм разворота на заданные углы в горизон- тальной плоскости позволяет фиксировать углы поворота при помощи, например, оптического микроскопа с лимбом. 1 з.п. ф-лы, 3 ил.
10
15
5
20
5
в виде нанесенных на стеклянную пластину вертикальных штрихов и расположены в картинных плоскостях объективов 11 и 12, задние узловые точки которых являются центрами проецирования, а расстояние между их проекциями в картинных плоскостях - базисом. Координатные каретки 15 и 16 расположены на основании 3 и выполнены с возможностью перемещения вдоль оси X. Микрометренные винты 17 и 18 служат для перемещения координатных кареток 15 и 16 и одновременно для установки проекционных марок 13 и 14 в нулевое положение (когда оси проекционных камер параллельны между собой и перпендикулярны базису) и последую-, щего перемещения их в положение, соответствующее перевычисленным абсциссам точек, выносимьсх на местность. Для отсчета величины линейных смещений проекционных марок 13 и 14 микро- метренные винты 17 и 18 снабжены щка- лами (не показаны).
Ось 4 включает оптический центрир, состоящий из защитного стекла 23, объектива 24, прямоугольной призмы 25, окуляра 26 и служащий для центрирования устройства над точкой стояния, а также механизм разворота устройства на заданные углы в горизонтальной плоскости, позволяющий фиксировать углы поворота, например, при помощи штифтового соединения или оптического микооскопа с лимбом (не показан).
Подставка 27 представляет собой подъемное устройство, состоящее из трех винтов 28-30, и посредством оси 4 связана с основанием 3 так,что при этом обеспечивается совпадение оси вращения устройств а с центром базиса и точкой стояния.
На основании 3 жестко закреплены два цилиндрических уровня 31 и 32 с взаимно перпендикулярными осями,слу- жащие для приведения основания 3 в горизонтальное положение винтами 28-30 подъемного устройства.
Визирное устройство 5 представляет
собой зрительную трубу, жестко связано с основанием 3, расположено параллельно базису в одной вертикальной плоскости и служит для ориентирования устройства.
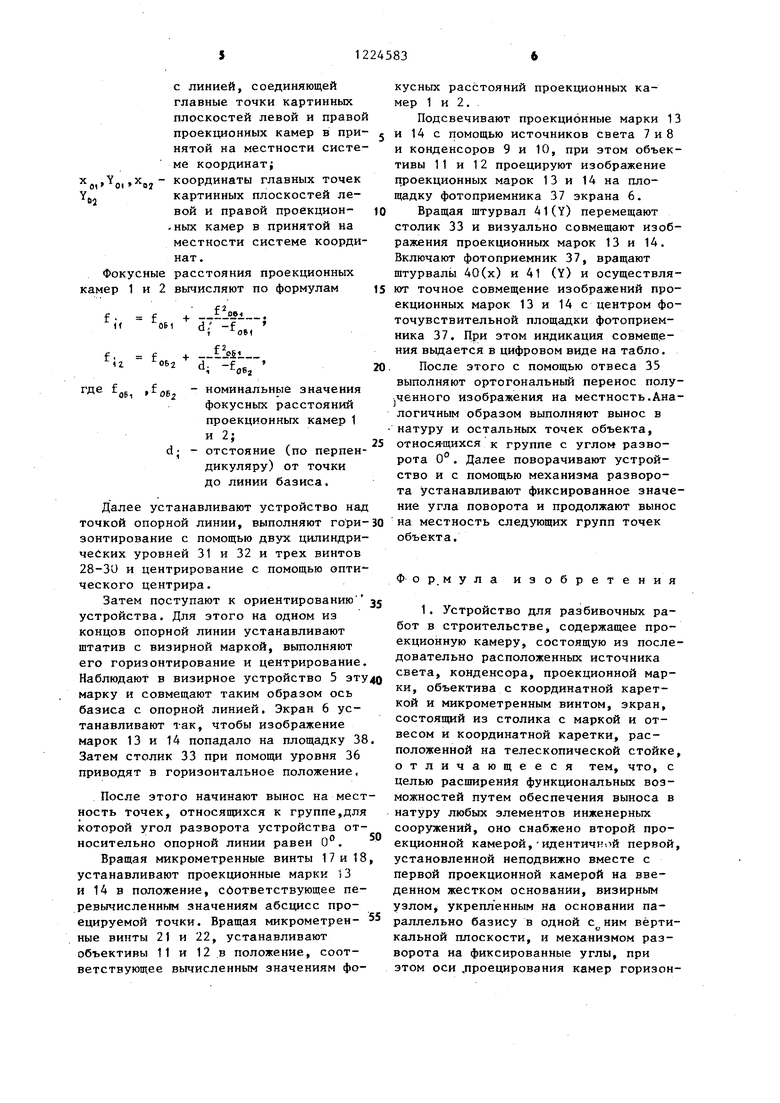
Экран 6 состоит из столика 33 (фиг.2), который несет на себе марку 34, отвес 35, цилиндрический уровень 36 и приемное устройство, представляющее собой фотоприемник 37 с цифровой индикацией на табло (не показано), например сканистор, размещенный на вертикальной площадке 38. Экран 6 служит для получения видимого изображения линии засечки и последующего ортогонального переноса ее гео- метрической оси на местность. Столик 33 установлен на координатной каретке 39 с возможностью перемещения по осям X и Y посредством вращения соответствующих шту-рвалов 40 (X) и 41(Y). Координатная каретка 39 смонтирована на штанге 42 телескопической стойки 43, которая служит для установки экрана 6 в штативе 44. Марка 3 крепится на столике 33 так, чтобы обеспечивалась соосность центров фоточувствительной площадки фотоприемника 37 и марки 34 экрана. 6.
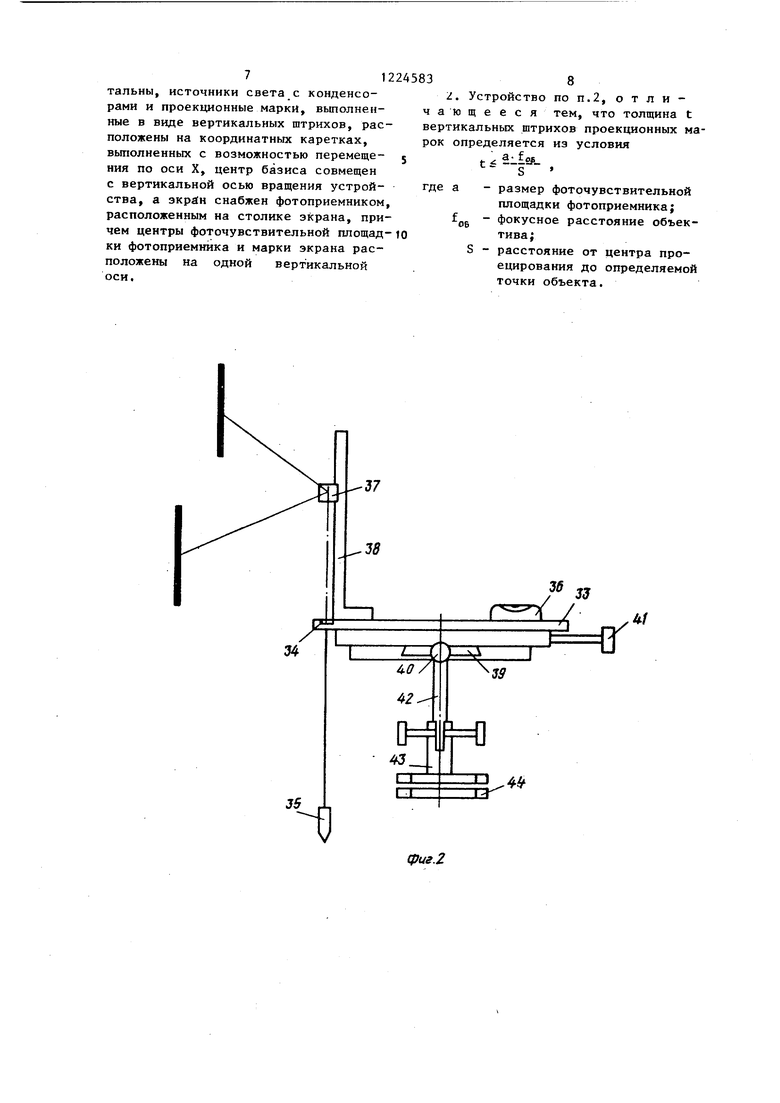
Толщина t вертикальных штрихов проекционных марок 13 и 14 зависит от размера фоточувствительной площадки фотоприемника 37 и расстояния от него до центра проецирования и определяется из условия (см.фиг.3).
t aifoB
t g
где а - размер фоточувствительной площадки приемного устройства;
f - фокусное расстояние объектива;
S - расстояние от центра проецирования до определяемой точки объекта.
Вертикальный размер штрихов проекционных марок 13 и 14 определяется из выражения
1 2f
ОБ
tge,
где 1 - вертикальный размер штриха; б - половина поля зрения объек- -- тива.
Разбивочные работы в строительстве осуществляют следующим образом.
Выбирают на объекте опорную линию, в качестве которой служит обьино одна из разбивочных осей, и закрепляют ее концы на местности. На опорной линии в зависимости от размеров объекта намечают одну или несколько точек, над которыми будет устанавливаться устройство, Координаты точек на опорной линии определяют геодезическим методом в пространственной системе координат, в которой задано проектное положение точек объекта.
Всю совокупность точек, подлежащих выносу на местность, разбивают на группы, кa7fфioй из которых соответствует определенное фиксированное угловое положение устройства относительно опорной линии. Фиксированный угол разворота устройства рассчитывается исходя из обеспечения перекрытия смежных зон охвата устройства и его работы в пределах 0-360 .
Затем перевычисляют проектные координаты точек объекта в абсциссы картинной плоскости по формулам
X, л(, ) +(Y,-YO,) ;
, . - (YN-YOZ ) . е x,Y - координаты точки пересечения линии, проходящей через заданное положение точки на местности и левый центр проецирования, с. линией, соединяющей главные точки картинных плоскостей левой и правой проекционных камер в принятой на местности системе координат;
Xjj,Y - координаты точек пересечения линии, проходящей через заданные положения точки на местности и правый центр проецирования.
с линией, соединяющей главные точки картинных плоскостей левой и правой проекционных камер в при- нятой на местности системе координат; координаты главных точек
картинных плоскостей левой и правой проекцион- .ных камер в принятой на местности системе координат.
Фокусные расстояния проекционных камер 1 и 2 вычисляют по формулам
f. f + „Eioei™-.
И ОБ1 d/ -f., t OS(
f, f +
г 2 d; -f,e,
где номинальные значения фокусных расстояний проекционных камер 1
и 2;
d - отстояние (по перпендикуляру) от точки до линии базиса.
Далее устанавливают устройство над точкой опорной линии, выполняют горизонтирование с помощью двух цилиндрических уровней 31 и 32 и трех винтов 28-30 и центрирование с помощью опти ческого центрира.
Затем поступают к ориентированию устройства. Для этого на одном из концов опорной линии устанавливают штатив с визирной маркой, вьтолняют его горизонтирование и центрирование. Наблюдают в визирное устройство 5 зту марку и совмещают таким образом ось базиса с опорной линией. Экран 6 устанавливают так, чтобы изображение марок 13 и 14 попадало на площадку 38 Затем столик 33 при помощи уровня 36 приводят в горизонтальное положение,
После этого начинают вынос на местность точек, относящихся к группе,для которой угол разворота устройства относительно опорной линии равен 0°.
Вращая микрометренные винты 17 и 18 устанавливают проекционные марки 13 и 14 в положение, сбответствующее перевычисленным значениям абсцисс проецируемой точки. Вращая микрометрен- ные винты 21 и 22, устанавливают объективы 11 и 12 в положение, соответствующее вычисленным значениям фокусных расстояний проекционных камер 1 и 2.
Подсвечивают проекционные марки 13 и 14 с помощью источников света 7 и 8 и конденсоров 9 и 10, при этом объективы 11 и 12 проецируют изображение проекционных марок 13 и 14 на площадку фотоприемника 37 экрана 6.
Вращая штурвал 41(Y) перемещают столик 33 и визуально совмещают изображения проекционных марок 13 и 14. Включают фотоприемник 37, вращают штурвалы 40(х) и 41 (Y) и осуществляют точное совмещение изображений проекционных марок 13 и 14 с центром фоточувствительной площадки фотоприемника 37. При этом индикация совмеше- ния вьщается в цифровом виде на табло. После этого с помощью отвеса 35 выполняют ортогональный перенос прлу 1ченного изображения на местность.Аналогичным образом выполняют вынос в натуру и остальных точек объекта, относящихся к группе с углом разворота о. Далее поворачивают устройство и с помощью механизма разворота устанавливают фиксированное значение угла поворота и продолжают вынос на местность следующих групп точек объекта.
Формула изобретения
1. Устройство для разбивочных работ в строительстве, содержащее проекционную камеру, состоящую из последовательно расположенных источника света, конденсора, проекционной марки, объектива с координатной кареткой и микрометренным винтом, экран, состоящий из столика с маркой и отвесом и координатной каретки, расположенной на телескопической стойке отличающееся тем, что, с целью расширения функциональных возможностей путем обеспечения выноса в натуру любых элементов инженерных сооружений, оно снабжено второй проекционной камерой, идентичн1 й первой установленной неподвижно вместе с первой проекционной камерой на введенном жестком основании, визирным узлом укрепленным на основании параллельно базису в одной с ним вертикальной плоскости, и механизмом разворота на фиксированные углы, при этом оси .проецирования камер горизон71
тальны, источники света с конденсорами и проекционные марки, вьтолнен- ные в виде вертикальных штрихов, раС положены на координатных каретках, выполненных с возможностью перемещения по оси X, центр базиса совмещен с вертикальной осью вращения устройства, а экран снабжен фотоприемником расположенным на столике экрана, при чем центры фоточувствительной площад ки фотоприемника и марки экрана расположены на одной вертикальной оси.
2245838
2. Устройство по п.2, отличающееся тем, что толщина t вертикальных штрихов проекционных марок определяется из условия
5 t
Siftf
где а - размер фоточувствительной
площадки фотоприемника; fpg - фокусное расстояние объек- 10тива;
S - расстояние от центра проецирования до определяемой точки объекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения планового положения точек объекта и устройство для его осуществления | 1981 |
|
SU979852A1 |
| Способ определения радиусов кривизны сферических поверхностей и устройство для его осуществления | 1988 |
|
SU1562691A1 |
| Стереоскоп измерительный | 1973 |
|
SU718823A1 |
| Стереокомпаратор | 1979 |
|
SU815500A1 |
| Способ трансформирования аэроснимков | 1947 |
|
SU78521A1 |
| СПОСОБ ГЕОДЕЗИЧЕСКИХ ИЗМЕРЕНИЙ ОБЪЕМНЫХ ОБЪЕКТОВ ПО ЗАДАННЫМ СВЕТОВЫМ МАРКАМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2079810C1 |
| Способ определения пространственных координат точек местности | 1985 |
|
SU1278580A1 |
| Монокомпаратор | 1982 |
|
SU1057783A1 |
| Проекционный координатограф | 1979 |
|
SU892750A1 |
| Прибор для контроля формы асферических поверхностей | 1981 |
|
SU1024706A1 |
Изобретение относится к геодезии и позволяет расширить функциональные возможности устройства путем обеспечения выноса в натуру любых элементов инженерных сооружений. На основании 3 с осью 4 неподвижно установлены аналогичные проекционные камеры 1 и 2, состоящие из источников света 7 и 8 с конденсаторами 9 и 10, проекционных марок 13 и 14 и объективов 11 и 12, ся с ND N0 .( СП 00 :о ifi/fi
-37
36
г /
33
JJ
0 / 42.
:59
-.
HlH
Редактор А.Огар
Составитель В.Агапова Техред И.Попович
Заказ 1938/37 Тираж 670 Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Корректор А.Обручар
| Справочник геодезиста / Под ред | |||
| В.Д.Большакова | |||
| М.: Недра, 1966, с.850, 852 | |||
| Способ определения планового положения точек объекта и устройство для его осуществления | 1981 |
|
SU979852A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
