Предлагаемый стереомоделятор является универсальным развертывающим прибором для парных воздушных (главным образом) и наземных снимков, дающим автоматическим оптико-механическим путем на чертежной доске топографический (высотный) план заснятой местности. На нем достигается как взаимная, так и внещняя ориентировка пары снимков и измеряются элементы этих ориентировок. На нем можно поэтому производить и пространственную фототриангуляцию т. е. создавать сеть старых точек без наземных геодезических работ для промежуточных снимков определенных марщрутов.
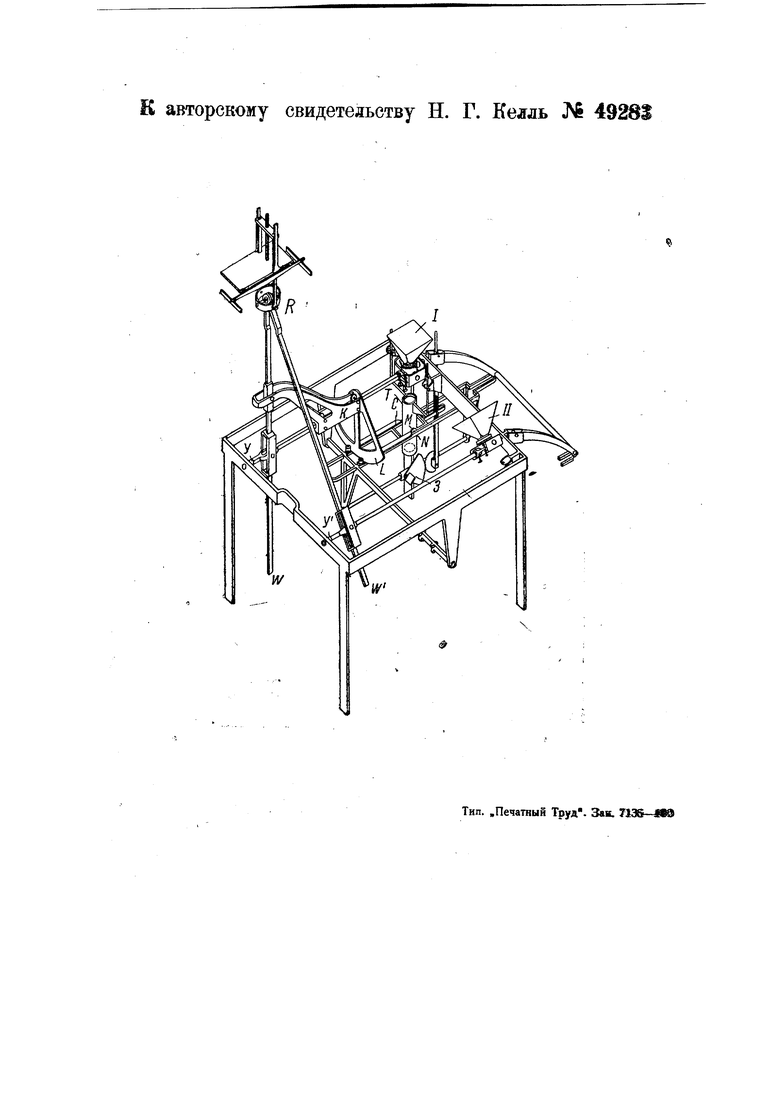
Прибор состоит из двух фотографических камер / и //, в которые вкладываются негативы, снятые с двух точек примерно одного и того же участка местности.
Камеры воспроизводят проектирующий пучок лучей. Кроме того, они принимают то взаимное положение, которое у них было в момент экспозиции; при этом одноименные лучи, идущие от одноименных точек, пересекаются между собою, и точки пересечения образуют модель местности в некотором определенном масштабе. Далее камеры поворачиваются вокруг параллельных (горизонтальных) осей У, У так, чтобы одноименные лучи оказались в двух параллельных плоскостях, проходящих через У, У и перпендикулярных к базису (прямой, соединяющей проектирующие центры объективов камер). В этих плоскостях вращаются две визирных трубы Т Т (труба Т на чертеже не показана), визирные оси которых направляются по одноименным лучам наблюдаемой точки. После визирных труб лучи попадают на вращающиеся зеркальца 3 и далее их ход в наблюдательной оптической системе с бинокулярным окуляром постоянен. Вместе с камерами вокруг осей У, У вращаются рычаги (ленкоры) W, IV, которые, кроме того, по отнощению к осям У, У наклоняются строго на те же углы, что и упомянутые выше визирные трубы. Это осуществляется при помощи ползунов К и С и сектора L (центральная часть прибора). Пересечение ленкоров W, W в узле R материально осуществляет пересечение прямых, отвечающих одноименным лучам, и воспроизводит модель местности. Перемещение узла R по трем координатным осям дает координаты точек и передается на чертежный стол, как в обычных координатометрах-автографах. Все повороты камер как установочные, так и наблюдаемые отсчитываются на лимбах или секторах, равно как и передвижения на координато;::рафе имеют отсчеты на линейных шкалах или
на барабанах винтов. В общем прибор -аутем стереоскопического совмещения одноименных точек парных негативов ; марками наблюдательной оптической системы вещественно воспроизводит при помощи двух рычагов модель местности (ее зеркальное изображение), что и оправдывает название прибора „стереомоделятор.
В одной из визирных труб помещена в плоскости оси N вращения трубы марка М.
Предмет изобретения.
1. Стереомоделятор, предназначенный .для построения в определенном масштабе модельной местности по двум стереоскопическим снимкам ее и состоящий из .двух фотографических ijaMep с заложенными в них фотографическими снимками, устанавливаемых в том взаимном положении, в котором они были в момент съемки, и двух визирных труб, отличающийся тем, что фотографические камеры I и II вместе с визирными трубами Т vi Т установлены на двух параллельных осях У и У, шарнирно соединенных с рычагами W и W, остающимися всегда параллельными оптическим осям визирных труб и пересекающимися
в узле R, с целью воспроизведения модели точки, наблюдаемой визирными трубами.
2.Форма выполнения стереомоделятора по п, 1, отличающаяся тем, что для управления движением рычагов IVviW применены ходящие по осям У и У и соединенные шарнирно с ними ползуны /Сс секторами L, связанными с ползунами С, в которых закреплены оси N вращения визирных труби которые могут перемещаться параллельно осям У и У .
3.В стереомоделяторе по пп. 1 и 2 применение в одной из визирных труб марки М, помещенной в плоскости оси Л/ вращения трубы.
4.В стереомоделяторе по пп. 1-3 применение расположенных под визирными трубами зеркал 3, вращаемых на угол, вдвое меньший угла поворота визирных труб Г и Т в плоскости, параллельной осям У и У, с целью направления лучей при всевозможных положениях визирных труб на неподвижные окуляры.
5.В стереомоделяторе по пп. 1-4 применение соединенного с узлом R приспособления, используемого в обычных. координатометрах-автографах для передачи координат точек на чертежный стол.