1
Изобретение относится к бурению j наклонно направленных и вертикальных -скважин.
Известен способ определения координат забоя скважин методом изме- 5 рения времени запаздывания упругой волны, фиксируемой сейсмоприемникси 1и на поверхности, относительно момента ее возникновения при ударе пгшающёго с заданной высоты долота о забой ll. Ю
Недостатками способа являются сложность операций и неточность в определении скорости распространений волны, которая приводит к ошибкам при измерении положения забоя, и необхо- 15 димость останавливать бурение и проводить операцию удара долота о забой.
Также известен способ определения искривления буровой скважины путем измерения упругих волн, возникающих 20 при работе долота, с. помощью сеймопрйемников, установленных на устье скважины 2 3.
Целью изобретения является повышение точности определения координат 25 забоя путем устранения ложных сигналов.
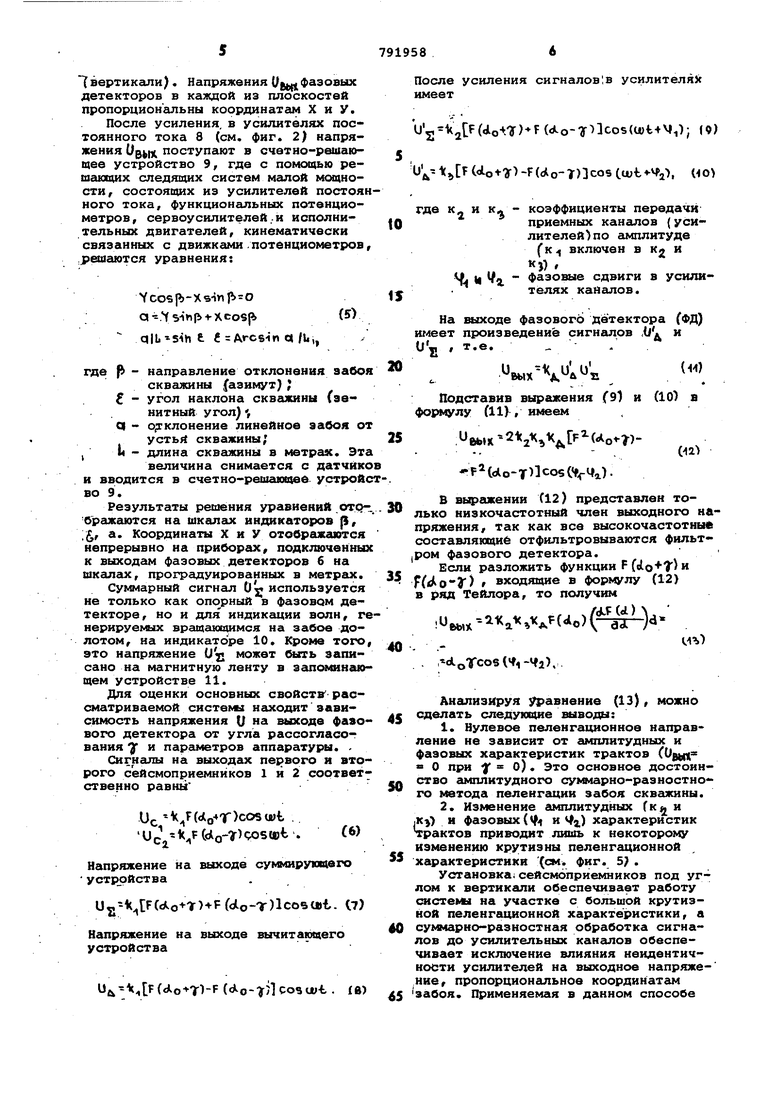
На фиг. 1 показан принцип использования направленных сеймоприемников для пеленгации забоя на фиг. 2 изо- 30
бражена функциональная схема суммарно-разностной обработки сигналов при пеленгации забоя; на Фиг, 3 изображены суммарная и разностная диаграммы направленности с сейсмоприемников; на f фиг. 4 показаны эпюры напряжений на входе и выходе суммарно-разностного устройства, на фиг. 5 - пеленгационная характеристика системы.
Для осуществления этого способа вертикальные сейсмоприемники располагаются на поверхности земли или в углубленных вблизи устья скважин попарно- под углом d.QK вертиксши в двух взаимо перпендикулярных плоскостях (XOZ и YOZ) В результате в Кс1ждой плоскости создается пара диагрс1мм направленности ) и FaW) f которые некоторойчастью перекрывают друг друга. Выбирая угол з{.о смещения диаграил таким, чтобы они пересеклись в области высокой крутизны, можно получить высокую точность пеленгования забоя. Однако слишком большой угол -«lo в бирать нельзя, так как снижается глубина действия сеймоприемников. Оптимальный вариант oto 45°.
Из нормированных диаграмм FI С ) и Fj. («L), построенных в полярных ко.ординатах, видно, что максимуьи диаграмм смещены на угол ±с/о 45 от разносигнального направления (РСН), где , г I2 . Равносигнальное направление совпадает с вертикальной осью Z. Известно, что направление перемещения корпуса сейсмоприемника определяется смещением почвы, на которой он установлен, его чувствительность к истинному смещению почвы U является функцией угла об и определяется уравнением: -)и|со5 1Эта зависимость чувствительности сейсмоприемников от направления смещёний почвы показана на фиг. 1 в виде полярных диагрси 1м направленности FI(/.) и РаГо1). При вращении долота на забое скважины возникают упругие волны, ко торые, распространяясь по породе, доходят до поверхности и возбуждают сейсмоприемники. Сигналы на выходах первого и BTOporcj сейсмоприемников (см. фиг. 1) соответственно равны: U(- -K.)c09 cjo-t U,---V.,f (c Q-r Costet, где к - коэффициент пропорционгшьности;F(J-)- нормированная диаграмма на правленности;ТГ - угол отклонения забоя от равносигнального направлен (вертикали), Ш - собственная частота сейсмоприемников. Для реализЕЩии суммарно-разностн го метода применяем систему, функциональная схема которой показана на фиг. 2. Для измерения одной координаты X или У система имеет два канала: сум марный и разностный. С ейсмоприемники 1 и 2, симметричн смещенныеотносительно устья сквгики ны и наклоненные под углом dLy 45 относительно вертикали, подключаютс до входа в усилитель к суммарно-раз ностному устройству 3, которое выполнено по специальной трансформаторной схеме (возможна и дфугая схе ма;}. С суммарного вывода S снимаетс сумма напряжений сейсмоприемников 1 2 Oji и + Ci РИ зависимост Суммарного напряжения от угла рассо ласования rjаналогична суммарной ди грамме, изобреикенной на фиг. За. С разностного выхода Л снимается разность напряжений U Ue Лсг висимость напряжения от угла рассуг сования представляет разностную диагргшму, изображенную на фиг. 36. На фиг. 4 показаны эпюры напряже ний, действующие на входе и выходе суммарно-разностного устройства. . При отсутствии рассогласования 0), когда направление на забой совпадает с разносигнальным направлением, системы, принятые сейсмоприемниками сигналы Осл Исправны, вследствие этого разностное напряжение 1/д равно нулю. Фаза разностного напряжения (f зависит от направления отклонения забоя от РСН (от знака) и может либо совпадать с фазой суммарного напряжения (Jjj/ либо быть с ним в противофазе. Это хорошо видно на эпюрах фиг. 4. Таким образом, сигнальным напряжением, которое несет полезную информацию о положении забоя относительно равносигнального направления, т.е. вертикали, является напряжение Уд. Напряжение Ujj и U поступает на вход суммарного и разностного каналов , которые состоят из усилителей 4,5 {см. фиг. 2). Выходным устройством, где вырабатывается напряжение ОВЫИ пропорциональное координате X (в другой плоскости - У).является фазовый детектор 6. Опорным напряжением на фазовом детекторе является суммарное напряжение Uj,, а сигнальными - разностное напряжение 0. Режим детектирования устанавливается квадратичным, чтобы выходное напряжение Ugbjx было пропорционально произведению входных напряжений .UjjU, где к .. - коэффициент передачи фазового детектора. Для исключения влияния изменения амплитуды сигнала на крутизну пеленгационной характеристики системы (см. фиг. 5) применена автоматическая регулировка усиления (АРУ) 7. Поскольку информацию о направлении на цель несет разностный сигнал, то во избежание демодуляции его схема АР 7 управляется только суммарным каиапоы, а выход схема АРУ подключен к усилителям обоих каналов 4 и 5. В результате амплитуда напряжения ии поддерживается постоянной, а амплитуда напряжения Од- обратно пропорциональной суммарному сигналу. Вместе с тем напряжение U независимо от АРУ прямо пропорционально разностному сигналу Уд . В таких условиях напряжение Од и О JJ оказывается пропорциональным отношению напряжений, т.е. . л . Ua с,и. .где к - коэффициент пропорциональности. Величина напряжения и0ф пропорционгшьна угловому рассогласованию } (см. фиг. 5) , а знак зависит от направления забоя по отношению к РСН 7Вертикали) . Напряжения (/{ фазовых детекторов в каждой из плоскостей пропорциональны координатгш X и У. После усиления, в усилителях постоянного тока 8 (см. фиг. 2) напряжения поступают в счетно-решаюшее устройство 9, где с помощью решающих следящих систем малой мснцности, состоящих из усилителей постоя ного тока, функциональньос потенциометров, сервоусилителей ..и исполнительных двигателей, кинематически связанных с движками /потенциометров peiaeao-scK уравнения: 4cos|b-Xs-inIb o a.4sin(bi-Xcosj% 5 Arc sin ,, где f - направление отклонения забоя скважины (азимут)J f - угол наклона сквеикины (зенитный угол), q - о;тклонение линейное заОоя от усты скважины, , и - длина сквгикины в метрах. Эта величина снимается с датчико и вводится в счетно-реш иов|ее устройс во 9. Результаты реоюния уравнений .OTQ-L Сражаются на шкалах индикаторов (S, ;g, а. Координаты X и У отображаются непрерывно на приборгис, подключенных к выходгш фазовых детекторов 6 на шкаьпах, проградуированных в метрах. Суммарный сигнал DV используется не только как опорный в фазовом детекторе, но и для индикации волн, ге нерируемых вращающимся на забое долотом, на индикаторе 10. Кроме того, это напряжение ид может быть записано на магнитную ленту в запюшнающем устройстве 11. Для оценки основных свойств рассматриваемой система находит зависимость напряжения U на выходе фазового детектора от угла рассогласования f и параметров аппаратуры. . Сигналы на выходах первого и второго сейсмоприемнйков 1 и 2 соответственно равны J )cos«)t . Напряжение на выходе суммирующего устройства . ()(io-T)lco5U t. С7) Напряжение на выходе вычитающего устройства (do- ilcosou-t . Гв) После усиления сигналов ,в усилителях имеет («io-«:y)F (Ao--y)3cos(Ujt + V|,)- (9) .,F()-F(io-T)coettJut -4 i ЦО где к, и Кл - коэффициенты передачи приемных кансшов (усилителей) по силплитуде (к включен в К2 и Vji ц 5. фазовые сдвиги в усили телях каналов. На выходе фазового детектора (ФД) HTieeT произведение сигнгшов ,0л и л . Подставив выражения (91 и (10) в (11) , имеем вь.)3co5()В вьфгикеиии (12) представлен только низкочастотный член выходного напряжения, так как все высокочастотны составляющие отфильтровываются фильтРОМ фазового детектора. Если разложить функции F и () г входящие в формулу (12) в ряд Тейлора, то получим )(ЙЧ1,АоГсо$(Ч,). Анализируя фавнение (13), можно сделать следующие выводы: 1.Нулевое пеленгационное направление не зависит от гичплитудных и фазовых характеристик трактов (00 О при о). Это основное достоинство гшплитудного суммарно-разностного метода пеленггщии забоя скважины. 2.Изменение амплитудных (к« и ,К)) и фазовых (1 и 1,) характеристик трактов приводит лишь к некоторому изменению крутизны пеленгадионной характеристики (см. фиг. 57 . Установка; сейсмоприемнйков под углом к вертикгши обеспечивает работу система на участке с большой крутизной пеленгационной характеристики, а суммарно-разностная обработка сигналов до усилительных кангшов обеспечивает исключение влияния неидентичности усилителей на выходное напряжение, пропорционгшьное координатам забоя. Применяемая в данном способе
система пеленгации не реагирует на помехи, исходящие из одной точки i пространства, так как они полностью компенсируются при вычитании сигналов.
Пpeи fyIцecтвo указанного способа состоит также в том, что он значительно меньше восприимчив к смплитудным флуктуациям упругих волн. Аппаратура для реализации данного способа дешевле в изготовлении и проще в эксплуатсщии. Система обеспечивает более высокую точность измерения координат.
Применение данного сдособа не вносит каких-либо технологических изменений в процесс бурения, не требует его остановки, повышается экономичность бурения, так как устраняются все инклинометрическиё измерения, проводиквле силс№1И геологической партии. Способ позволяет оперативно выводить забой скважины в заданные координаты. Времени на измерение одного и того же затрачивается в пять раз меньше, чем в прототипе. Эт особенно важно при проводке наклонно направленных скважин. .
Проведенные эксперименты показали что при подборе сеймоприемников можно получить симметричную пеленгационную характеристику с высокой чувст
вительностью на изменение угловых координат источника колебаний.
Следует отметить особую перспективность предлагаемого способа при внедрении АСУ ТП бурения, так как координаты забоя вьфабатываются в этом случае автоматически.
Формула изобретения
Способ определения искривления буровой скважины путем измерения упругих волн, возникающих при работе долота, с помощью сейсмоприемников, установленных на устье сквгикины, о тлича-ющийся тем, что, с целью повьоиения точности определения координат забоя путем устранения ложных сигналов, сейсмоприемники устанавливают наклонно на одинаковом
расстоянии от устья скважины в диаметрально противоположных направлениях в двух взаимно перпендикулярных плоскостях.
Источники информации,
во внимание при экспертизе
1.Патент США №381345,
кл. Е 21 В 47/02, опублик. 1974.
2.Авторское свидетельство СССР. W 286890, кл. Е 21 В 47/02, 1969.
«fl
«c,c.
z
A A. V
-7((Р -во -SO --Я 30 -to -Ю
ев JO 1/в so
70 т
(,у)
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическое устройство для измерения искривления ствола скважин | 1981 |
|
SU1057680A1 |
| Способ измерения искривленияСКВАжиН | 1979 |
|
SU802537A1 |
| Фазовый пеленгатор | 2016 |
|
RU2618522C1 |
| СПОСОБ СОВМЕСТНОГО МОНОИМПУЛЬСНОГО МГНОВЕННОГО ОПРЕДЕЛЕНИЯ ЧАСТОТЫ ПРИНИМАЕМОГО СИГНАЛА И ПЕЛЕНГА ИСТОЧНИКА ЭТОГО СИГНАЛА | 2012 |
|
RU2492500C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ИЗМЕРЕНИЙ РАДИОТЕХНИЧЕСКИХ ХАРАКТЕРИСТИК ГОЛОВОК САМОНАВЕДЕНИЯ РАКЕТ | 2012 |
|
RU2526495C2 |
| РАДИОПЕЛЕНГАТОР | 2004 |
|
RU2262714C1 |
| СПОСОБ РАЗДЕЛЬНОГО ФОРМИРОВАНИЯ НУЛЕЙ В СУММАРНОЙ И РАЗНОСТНОЙ ДИАГРАММАХ НАПРАВЛЕННОСТИ МОНОИМПУЛЬСНОЙ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКИ | 2004 |
|
RU2269846C1 |
| РАДИОНАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ИЗМЕРЕНИЯ ПЕЛЕНГА ПОДВИЖНОГО ОБЪЕКТА | 2012 |
|
RU2507529C1 |
| СПОСОБ РАЗДЕЛЬНОГО ФОРМИРОВАНИЯ НУЛЕЙ В СУММАРНОЙ И РАЗНОСТНОЙ ДИАГРАММАХ НАПРАВЛЕННОСТИ МОНОИМПУЛЬСНОЙ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКИ | 2004 |
|
RU2273922C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ЦЕЛЕЙ В МОНОИМПУЛЬСНОЙ ОБЗОРНОЙ РЛС И МОНОИМПУЛЬСНАЯ ОБЗОРНАЯ РЛС | 2004 |
|
RU2270458C1 |