Изобретение относится к области радиотехнических измерений и может быть использовано для экспериментальной оценки радиотехнических характеристик (РТХ) головок самонаведения (ГСН), содержащих антенну, защищаемую радиопрозрачным обтекателем.
Для обеспечения необходимой точности наведения ракеты на цель требуется с высокой точностью определять пеленгационные ошибки, вносимые радиопрозрачным обтекателем, и изменение коэффициента прохождения мощности сигналов при различных взаимных угловых положениях радиооптической оси защищаемой пеленгационной антенны ГСН и строительной оси (оси симметрии - далее, оси) антенного обтекателя.
Известны устройства для измерения РТХ ГСН, содержащие опорно-поворотное устройство (ОПУ) для взаимного перемещения обтекателя относительно пеленгационной антенны, датчики положения обтекателя, размещаемые перед пеленгационной антенной вспомогательные излучающие антенны (имитаторы цели), источник зондирующих сигналов, подаваемых на вспомогательные антенны (имитаторы цели) и измерительную аппаратуру, подключаемую к суммарному и разностным (по курсу и тангажу) выходам пеленгационной антенны.
Примерами могут служить измерительные устройства по изобретениям SU 459744, RU 2133478, RU 2287834.
Общими недостатками известных устройств является низкая точность и недостаточная полнота оценки РТХ ГСН в секторе сканирования пеленгационной антенны ГСН.
Наиболее близким к заявленному техническому решению является устройство по патенту RU 2287834С1.
Недостатками данного устройства, принимаемого в качестве ближайшего аналога по отношению к заявленному техническому решению, являются:
1) низкая точность оценки пеленгационных ошибок, вносимых обтекателем при его различных угловых положениях относительно пеленгационной антенны, вследствие применения комбинированного экспериментально-расчетного метода оценки измеряемых характеристик;
2) отсутствие первоначальной калибровки (аттестации) измерительной установки;
3) отсутствие учета пеленгационных ошибок по ортогональной координате (по тангажу - при перемещении обтекателя в направлении курсовой плоскости);
4) отсутствие возможности измерений РТХ во всем секторе сканирования;
5) низкая производительность измерений.
Целью заявленного решения является устранение недостатков аналога.
Указанная цель и заявленный технический результат достигаются тем, что автоматизированная система для измерения РТХ ГСН содержит дистанционно управляемое двухкоординатное ОПУ 1, содержащее датчики углового положения обтекателя по курсу «α» и по тангажу «β» и обеспечивающее угловое перемещение обтекателя 2 относительно неподвижной пеленгационной антенны ГСН 3 по координатам «α» и «β» в пределах штатного сектора сканирования (α1-α2, β1-β2) антенны ГСН 3 относительно оси обтекателя 2 в составе ГСН, измерительные антенны 4.1÷4.5 (имитаторы цели), размещаемые в дальней зоне антенны ГСН, одна из которых 4.1 предварительно устанавливается в точке равносигнального направления (РСН) антенны ГСН 3, а другие (4.2÷4.4) размещаются в плоскости XY, ортогональной исходному РСН антенны ГСН 3 на расстояниях (±Lx1) и (+Ly1) от первой из указанных антенн - 4.1 (в обе стороны - по курсу «α» и тангажу «β»), эквивалентных максимальным значениям пеленгационных ошибок «γx» и «γy» по курсу и тангажу, подлежащих измерениям, каждая измерительная антенна 4.1÷4.5 подключается к соответствующему коммутируемому выходу программно управляемого генератора 5 - источника зондирующих излучений, суммарный AΣ и разностные (Aα и Aβ) выходы антенны ГСН 3 подключены к соответствующим входам измерительных устройств 6.1 и 6.2, обеспечивающих измерение амплитудно-фазовых соотношений сигналов с выходов разностных каналов антенны ГСН 3 по отношению к сигналам с суммарного выхода антенны ГСН, а также к устройству 6.3, обеспечивающему измерение относительных значений АΣ амплитуды сигнала с суммарного выхода АΣ антенны ГСН 3 по отношению к амплитуде опорного сигнала Аоп, ответвленного от выхода Аоп генератора 5 - источника зондирующего излучения, выходы датчиков α и β ОПУ 1 и выходы Аα, Фα, Аβ, Фβ, АΣ измерительных устройств 6.1, 6.2 и 6.3 подключены через интерфейсные шины к управляющему компьютеру 7 измерительной системы, управляющие выходы которого подключены к входам α и β дистанционно управляемых приводов ОПУ 1 по курсу «α» и тангажу «β», а также к входу программно-управляемого генератора 5 (в том числе - для управления коммутацией зондирующих сигналов, подаваемых поочередно на измерительные антенны 4.1÷4.5).
Устройство заявленной измерительной системы поясняется на фиг.1, где соответствующими номерами указаны составные части системы, перечисленные выше, а также приведены существенные конструктивные связи между составными частями, обеспечивающие реализацию заявленного технического эффекта.
Заявленная измерительная система фиг.1 имеет несколько режимов работы и несколько модификаций ее технической реализации:
1) режим калибровки;
2) режим измерений РТХ с неподвижными измерительными антеннами (имитаторами цели);
3) режим измерений РТХ с подвижной измерительной антенной;
4) режим измерений РТХ на промежуточной частоте ГСН.
Работа в режиме калибровки измерительной системы фиг.1 производится при снятом обтекателе 2. С помощью вспомогательных средств (например, подвижного штатива с подвижным креплением измерительной антенны 4.1) измерительная антенна 4.1 устанавливается на РСН пеленгационной антенны ГСН 3 по курсу «α0» и тангажу «β0». Установка измерительной антенны 4.1 производится путем постоянной подачи на нее зондирующих сигналов с выхода генератора 5 и анализа текущих значений амплитуд Аα и Аβ с выходов разностных каналов пеленгационной антенны ГСН 3, измеряемых с помощью измерителей амплитудных и фазовых соотношений (далее - амплифазометров АФ) (измерительные устройства 6.1 и 6.2). На основе этих измерений при нахождении измерительной антенны 4.1 на РСН «β0» по тангажу и в процессе последовательного перемещения этой измерительной антенны 4.1 по координате X (копланарной курсовой плоскости «αi, β0») в обе стороны от РСН «α0» по курсу будут получены амплитудная и фазовая диаграммы разностного канала антенны ГСН 3 по курсу Аа(lx) и Фα(lx), характерный вид которых приведен на фиг.2. Амплитудная и фазовая диаграммы Аβ(ly) и Фβ(ly) будут получены аналогичным образом при постоянном нахождении измерительной антенны 4.1 на РСН по курсу α0 и при перемещении измерительной антенны 4.1 в ортогональном направлении ±Y, копланарном плоскости тангажа βi. Формы диаграмм по курсу и тангажу (при симметрии антенны ГСН 3) будут аналогичны фиг.2.
Расстояния (+lx) и (-lx) соответствуют крайним точкам линейного участка фазовой диаграммы фиг.2 разностного канала по курсу. Аналогично, для тангажа получим расстояния (+ly) и (-ly).
Расстояние R между фазовым центром пеленгационной антенны ГСН 3 и фазовым центром измерительной антенны 4.1 должно удовлетворять условиям дальней зоны, т.е. по известному из антенной техники и техники антенных измерений соотношению должно удовлетворять условию:
где R - расстояние между фазовым центром пеленгационной антенны ГСН 3 и фазовым центром измерительной антенны 4.1 (плоскостью расположения фазовых центров измерительных антенн 4 - при нескольких антеннах в составе системы);
D - максимальный размер раскрыва апертуры антенны ГСН 3;
λ - длина волны излучения, на которой работает ГСН.
Исходя из известного расстояния R между фазовыми центрами пеленгационной антенны ГСН 3 и измерительной антенны 4.1 отклонения от РСН на величину (±lx1) по курсу n на величину (±ly1) по тангажу при измерении калибровочных диаграмм фиг.2 по курсу (аналогичной - по тангажу) соответствуют угловым отклонениям линии пеленга от РСН на величины (±γα1) и (±γβ1), определяемые по известным тригонометрическим соотношениям:
Из соотношений (2) следует, что если ожидаемые максимальные значения пеленгационных ошибок (γαmax) или (γβmax), вносимых обтекателем 2, не превышают значений γα1 и γβ1 по соотношению (2), то в составе измерительной системы фиг.1 не требуется применять дополнительные измерительные антенны 4.2 и 4.3 по координате X или 4.4 и 4.5 по координате Y, соответственно.
Если ожидаемые значения пеленгационных ошибок (γαmax) или (γβmax) превышают значения, получаемые по соотношению (2) на основе калибровочных амплитудных и фазовых диаграмм разностных каналов фиг.2, то в соответствующих направлениях сканирования обтекателя 2 необходимо устанавливать дополнительные измерительные антенны 4.
Количество дополнительных измерительных антенн, которые необходимо разместить в этом случае по каждую сторону от основной измерительной антенны 4.1, будет определяться максимальным значением измеряемой пеленгационной ошибки по курсу и тангажу, соответственно. Соотношение для выбора количества дополнительных измерительных антенн по курсу в направлении (±X) (аналогично - по тангажу в направлении Y) будет иметь вид:

где γα1 - угловая ширина амплитудной диаграммы разностного канала фиг.2, соответствующая линейному участку фазовой диаграммы этого же канала;
n(+x), n(-x) - количество дополнительных измерительных антенн, располагаемых по обе стороны от основной измерительной антенны 4.1 (целые числа).
Калибровочные амплитудные и фазовые диаграммы разностных каналов по курсу и тангажу фиг.2, полученные указанным способом, заносятся в память управляющего компьютера 7 в виде таблиц:
Достоинством таких таблиц является то, что (в зависимости от реализуемой точности измерения амплитудных (Uα, Uβ) и фазовых (Фα, Фβ) соотношений сигналов на выходе разностных каналов) определение значений пеленгационных ошибок можно производить на основе амплитудных и фазовых или на основе только фазовых диаграмм разностных каналов фиг.2. В первом случае основой является амплитудная диаграмма γα(Uα), а фазовая диаграмма лишь используется для определения направления смещения линии пеленга (плюс Фα или минус Фα).
При необходимости дальнейшего повышения точности может быть произведена дополнительная калибровка амплитудно-фазовых диаграмм разностных каналов фиг.2 при надетом обтекателе. В этом случае после установки обтекателя 2 на ОПУ 1 для нескольких угловых положений αi обтекателя 2 производится оценка величины пеленгационной ошибки 


где Δγα - значение погрешности измерений методом неподвижных измерительных антенн;
полученное перемещением измерительной антенны 4.1 на результирующее РСН (прямым методом).
Работа измерительной системы в режиме измерений пеленгационных ошибок и коэффициента прохождения при неподвижных измерительных антеннах осуществляется следующим образом.
По результатам калибровки в памяти управляющего компьютера 7 формируются калибровочные зависимости пеленгационных ошибок от значений амплитуды и фазы в разностных каналах, а также зависимости значений амплитудной диаграммы суммарного канала при угловых смещениях от исходного направления пеленга:
где уα и уβ - калибровочные таблицы (4);


В исходном состоянии основная измерительная антенна 4.1 находится на РСН пеленгационной антенны ГСН 3 и постоянно закреплена. Необходимое количество других измерительных антенн 4.i устанавливают по обе стороны от основной измерительной антенны 4.1 на расстояниях от ее фазового центра (±lxi) и (±lyi), определяемых из соотношения (3):
где lxi,lyi - расстояние между фазовым центром основной измерительной антенны 4.1 и фазовыми центрами последующих номеров «ni» и «nj» дополнительных измерительных антенн по координатам «X» и «Y», количество которых определяется по соотношению (3).
По завершении калибровки измерительной системы на ОПУ 1 устанавливается обтекатель 2 и начинается цикл измерений, включающий:
1) отсчет текущего положения (αi, βj) обтекателя 2 по курсу и тангажу относительно исходного РСН «α0β0» пеленгационной антенны ГСН 3. Значение текущих координат (αi, βj) определяется с помощью датчиков угловых положений «α» и «β», входящих в состав ОПУ 1.
Коды значений координат (αi, βj) по интерфейсным шинам поступают в управляющий компьютер 7, который осуществляет автоматическое управление перемещением обтекателя 2 с помощью дистанционно управляемых приводов ОПУ. При этом во избежание поломки обтекателя, для каждого текущего значения координат положения обтекателя по тангажу (βi) управляющий компьютер 7 контролирует предельно допустимые значения [αmax(βj)] положения обтекателя по курсу определяемых границами сектора сканирования обтекателя 2 относительно антенны ГСН 3 (конструкцией системы «антенна-обтекатель» ГСН). До тех пор, пока результирующее положение РСН не выйдет за пределы (±γα1, ±γβ1), определяемых на основе калибровочных таблиц (6) и соотношения (2) для основной измерительной антенны 4.1, зондирующие сигналы с выхода генератора 5 подаются на вход измерительной антенны 4.1. При увеличении значения пеленгационной ошибки γα или γβ за пределы зоны измерения с применением основной измерительной антенны зондирующие сигналы начинают подавать с выхода генератора 5 на следующую по расположению дополнительную измерительную антенну. Для каждого текущего положения обтекателя 2 (αi, βj) производятся измерения амплитудных и фазовых соотношений (Uα, Фα, Uβ, Фβ) сигналов с выходов разностных каналов антенны ГСН 3, а также амплитудных соотношений с выхода суммарного канала антенны 3. Коды этих значений с выходов соответствующих измерительных устройств 6.1, 6.2, 6.3 поступают в управляющий компьютер 7, где производится определение текущих значений пеленгационных ошибок, крутизны пеленгационных ошибок (КПО) по каждой координате и текущего значения коэффициента прохождения обтекателя.
Текущие значения пеленгационных ошибок γα и γβ определяются на основе измеренных значений (Uα, Фα) и (Uβ, Фβ) с помощью калибровочных таблиц (6). При выходе значения пеленгационной ошибки за пределы зоны измерения основной измерительной антенны 4.1 компьютер автоматически к основному значению пеленгационной ошибки, полученной по исходной калибровочной таблице (6), добавляет поправку на номер положения (ni) или (nj) дополнительной измерительной антенны, вытекающей из соотношений (7). Определение коэффициента прохождения обтекателя по амплитуде осуществляется путем деления текущего значения UΣ(αi, βj) на калибровочные значения UΣ из калибровочной таблицы (6) в памяти управляющего компьютера.
Циклы измерений повторяются после установки обтекателя 2 с помощью ОПУ 1 под управлением компьютера 7 в очередное угловое положение βj+1 по тангажу и перемещения обтекателя 2 по координате α (по курсу) в пределах сектора сканирования, допустимого для данного углового положения βj+1 по тангажу. Измерения полностью заканчиваются после прохождения всех курсовых сечений в пределах сектора сканирования по тангажу. В результате этого в компьютере будет получен массив значений основной пеленгационной ошибки γα(α, β) и ортогональной составляющей γβ(α, β) пеленгационных ошибок, вносимых обтекателем при различных его угловых положениях относительно радиооптической оси пеленгационной антенны ГСН 3. Одновременно будет сформирован массив значений коэффициента прохождения T(а,р) сигналов для различных взаимных положений обтекателя 2 и антенны ГСН 3 в секторе сканирования (α1-α2)×(β1-β2). При необходимости более точной оценки векторных значений пеленгационных ошибок пеленгационная антенна ГСН 3 может быть переустановлена на ОПУ 1 с разворотом на 90°. Положение курсовой и тангажной плоскостей при этом поменяются, полный цикл измерений РТХ ГСН будет повторен для нового положения антенны ГСН 3.
Рассмотренный метод измерений с применением системы фиг.1 позволяет достичь более высокой точности оценки значений пеленгационных ошибок, КПО (непрерывно вычисляемых в компьютере по мере перемещения обтекателя по координатам α и β) и коэффициента прохождения - по сравнению с ближайшим аналогом.
Обеспечивается достоверная первичная калибровка (аттестация) измерительной системы, метрологические характеристики которой непосредственно определяются средствами измерений, входящих в состав системы. Обеспечивается полнота оценки РТХ ГСН во всем секторе сканирования антенны ГСН 3 относительно обтекателя 2. Таким образом, заявленный технический результат, заключающийся в обеспечении достоверности измерений путем первоначальной калибровки, повышении точности и полноты оценки значений РТХ ГСН достигнут.
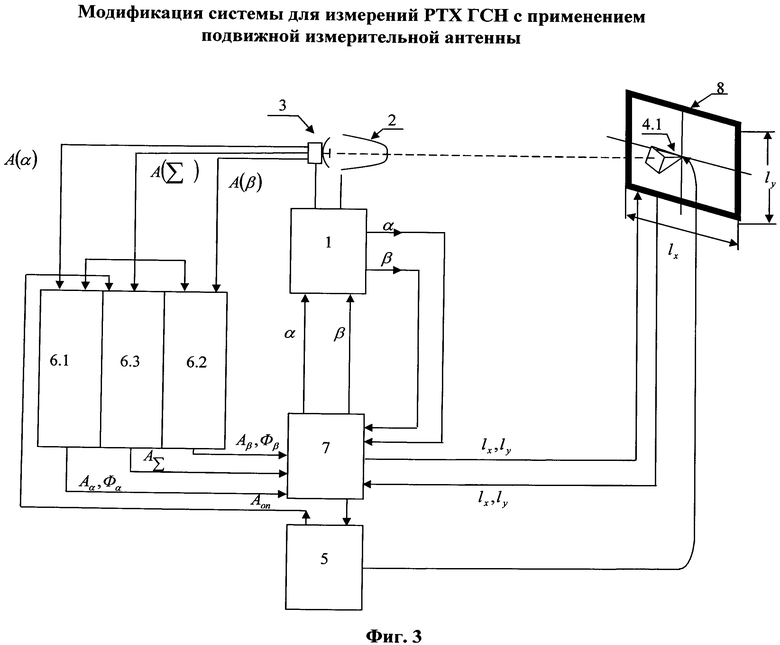
Однако рассмотренный метод не позволяет достичь предельных точностей оценки РТХ ГСН вследствие наличия методических погрешностей (5), связанных с определением значений РТХ по калибровочным таблицам, в основе которых лежат амплитудные и фазовые диаграммы разностных каналов фиг.2 антенны ГСН 3. В этом методе погрешности измерений амплитудных и фазовых соотношений участвуют дважды (при калибровке и в процессе измерений), что увеличивает результирующую погрешность оценки РТХ (хотя она и будет меньше, чем у аналога). В связи с этим предлагается модификация измерительной системы фиг.1, в которой исключены дополнительные измерительные антенны, основная измерительная антенна 4.1 устанавливается на управляемое координатное устройство с возможностью одновременного перемещения в направлениях «X» и «Y» под управлением компьютера 7, а измерения РТХ производятся в режиме подвижной измерительной антенны 4.1.
Работа системы в режиме измерений РТХ ГСН с подвижной измерительной антенной
Рассмотрим работу модификации измерительной системы фиг.3, в которой исключены дополнительные измерительные антенны, измерительная антенна 4.1 установлена на дистанционно управляемое двухкоординатное устройство 8. Перемещение измерительной антенны 4.1 осуществляется по координатам «X» и «Y» в плоскости, перпендикулярной РСН пеленгационной антенны ГСН 3 в отсутствии обтекателя (как и при исходной калибровке по ранее рассмотренному методу измерений с неподвижной измерительной антенной). Текущее положение измерительной антенны 4.1 в плоскости перемещений измеряется с помощью соответствующих датчиков перемещения «lx» и «ly», входящих в состав координатного устройства 8. Коды текущих значений координат (lxi, lyj) измерительной антенны 4.1 поступают с датчиков координатного устройства 8 через интерфейсную шину в управляющий компьютер 7. С управляющего выхода управляющего компьютера 7 на исполнительные координатные приводы (lx, ly) координатного устройства 8 через интерфейсную шину подаются команды управления (Lxi,Lyj) для установки измерительной антенны 4.1 в текущее положение РСН антенны ГСНЗ.
Способ измерений РТХ ГСН с помощью системы фиг.1 с применением модификации этой измерительной системы согласно фиг.3 заключается в следующем.
Перед началом измерений при снятом обтекателе 2 и неподвижной пеленгационной антенне ГСН 3 производится управляемое перемещение измерительной антенны 4.1 по координатам «X» и «Y» (аналогично процедуре калибровки измерительной системы фиг.1) для установки измерительной антенны 4.1 точно в положение РСН (см. фиг.2), соответствующее исходным координатам (lx0, ly0). В этом положении измеряются текущие значения разности фаз (Фα0) и (Фβ0) на выходах разностных каналов «α» и «β» пеленгационной антенны ГСН 3. Коды этих значений фиксируются в памяти управляющего компьютера 7 в качестве базовых (опорных, эталонных) значений. Одновременно фиксируется исходное значение относительного уровня амплитуды UΣ на выходе суммарного канала антенны ГСН 3. На этом процедура исходной калибровки и подготовки системы фиг.3 к измерениям закончена.
Необходимо отметить, что погрешности измерения разностей фаз (
Процедура последующих измерений РТХ ГСН, как и для ранее рассмотренного варианта системы фиг.1, основана на циклическом перемещении установленного на ОПУ 1 обтекателя 2 по координате «α» (курсу) при периодической переустановке положения ОПУ 1 на очередное значение координаты «βj» (тангажа) и контроле за нахождением обтекателя в допустимом секторе сканирования. За счет влияния обтекателя результирующее положение РСН антенны ГСН 3 будет смещаться по координатам «X» и «Y» в плоскости перемещения измерительной антенны 4.1 на координатном устройстве 8. Смещение положения РСН приводит к изменению знака и значения разности фаз (Фα) и (Фβ) на выходах соответствующих разностных каналов антенны ГСН 3. Значение и знак кодов разности фаз (Фα) и (Фβ) будут сигнализировать о величине и направлении смещения результирующего положения РСН антенны ГСН 3 относительно исходного положения РСН (lx0) и (ly0) для антенны ГСН 3 без обтекателя 2 (т.е. о величине и знаке пеленгационной ошибки, вносимой обтекателем 2).
Управляющий компьютер 7 анализирует поступающие на него с выходов измерительных устройств 6.1 и 6.2 коды текущих значений (Фα) и (Фβ). При отклонении текущих значений от исходных значений (Фα0) и (Фβ0), установленных при калибровке измерительной системы и соответствующих нахождению измерительной антенны 4.1 на РСН, управляющий компьютер 7 вырабатывает управляющие команды на координатное устройство 8. По этим командам измерительная антенна 4.1 перемещается из положения (lx0) и (ly0) в новое положение (lxi) и (lyj), соответствующее новому положению РСН (обусловленному пеленгационными ошибками, вносимыми обтекателем 2 при его перемещении относительно антенны ГСН 3). Текущие значения координат (lxi) и (lyj) измеряются с помощью датчиков, входящих в состав координатного устройства 8. Управляющий компьютер 7 определяет разности текущих значений координат и исходных значений координат положения измерительной антенны 4.1:

На основе измеренных линейных отклонений (Δlxi и Δlyj) положения измерительной антенны 4.1 (соответствующих угловым отклонениям результирующего положения РСН антенны ГСН 3 под влиянием перемещения обтекателя 2 по координатам «α» и «β») управляющий компьютер 7 по соотношению (2) определяет текущие значения пеленгационных ошибок γα(αi, βj) и γβ(αi, βj). Для обеспечения требуемой точности управляющий компьютер 7 согласует (регулирует) скорость перемещения ОПУ 1 (скорость сканирования обтекателя 2 относительно антенны ГСН 3) и скорости перемещения измерительной антенны 4.1 по координатам «X» и «Y» на координатном устройстве 8 таким образом, чтобы текущие значения разности фаз Фα и Фβ не превышали значений, ограничиваемых допустимой погрешностью измерений РТХ ГСН. В предельном случае эти отклонения не должны превышать разрешающей способности измерителей разности фаз устройств 6.1 и 6.2 (интервалов квантования измеряемых значений разностей фаз «dФα» и «dФβ»).
Управление скоростью перемещения ОПУ 1 по координате «α» (при сканировании сектора сечениями βj) осуществляется в управляющем компьютере на основе непрерывного вычисления значения КПО по соотношению
где dα - интервал по координате «α», на котором определяются текущие значения КПО;
Δγi+1 - текущее изменение значения пеленгационной ошибки у при перемещении обтекателя на величину «dα».
Аналогично контролируется значение КПО по ортогональной составляющей (по координате β).
Одновременно с контролем текущих значений разности фаз


Таким образом, при использовании подвижной измерительной антенны 4.1, перемещаемой под управлением компьютера 7 с помощью координатного устройства 8 в модификации измерительной системы фиг.3 обеспечивается более высокая точность измерений по сравнению с ближайшим аналогом и вариантом измерительной системы фиг.1 с неподвижной измерительной антенной 4.1. При этом обеспечивается необходимая полнота измерений РТХ ГСН во всем секторе относительных перемещений обтекателя 2 и антенны ГСН 3 по координате «α, β».
Режим измерений РТХ ГСН на промежуточной частоте используют в тех случаях, когда измерительные устройства 6.1, 6.2 и 6.3 при измерениях на частоте зондирующих сигналов f не обладают необходимой чувствительностью или когда требуется достоверная оценка значений РТХ с использованием штатных каскадов преобразования частоты и усиления на промежуточной частоте FП из состава ГСН. Для реализации этого режима в составе измерительных систем фиг.1 и фиг.3, соответственно, генератор 5 выполняют в виде синтезатора частоты, имеющего выход на частоте зондирующих сигналов f1, подключаемый к измерительной антенне 4.1 (а также к дополнительным измерительным антеннам 4 в варианте системы фиг.1), выход сигнала гетеродина f2, подаваемый на смесители суммарного и разностных каналов в составе штатной антенны ГСН 3, и выход опорного сигнала по промежуточной частоте FП, подаваемый на вход измерителя амплитуды суммарного канала (измерительное устройство 6.3). В качестве измерительных устройств 6.1, 6.2 и 6.3 в этом случае используют измерители амплитудных соотношений и разности фаз, аналогичные по функциям для ранее рассмотренных вариантов применения измерительных систем фиг.1 и фиг.3, но подключаемые к выходам штатных каскадов усиления промежуточной частоты (УПЧ) из состава штатной антенны ГСН 3 и измеряющие амплитудно-фазовые соотношения сигналов с выходов разностных и суммарного каналов антенны ГСН 3 на промежуточной частоте FП.
Во всем остальном реализация измерений в модификациях измерительных систем фиг.1 и фиг.2, использующих измерения амплитудных и фазовых сигналов на промежуточной частоте FП, аналогична рассмотренным ранее способам измерений РТХ ГСН с использованием неподвижной и подвижной измерительной антенны 4.1, соответственно.
Техническая реализация заявленных вариантов измерительной системы осуществляется на основе устройств, известных из уровня техники. В качестве ОПУ используется устройство, идентичное таким же устройствам из состава аналогов. В качестве измерительных устройств для измерения амплитудных и фазовых соотношений используются серийные цифровые измерительные приборы (амплифазометры, измерители векторных параметров сигналов), выпускаемые отечественной и зарубежной промышленностью. В качестве генераторов используются серийные программноуправляемые генераторы отечественного и зарубежного производства на соответствующие диапазоны частот работы ГСН (в том числе - по схеме синтезатора частоты). В качестве управляющего компьютера используется серийный персональный компьютер отечественного или зарубежного производства. Координатное устройство реализуется на основе конструктивных решений, известных из уровня техники еще с 70-х годов прошлого столетия (например, оборудования фирмы «Signtific Atlanta», США, Калифорния). Управление перемещением по вертикали и по горизонтали в координатном устройстве 8 может осуществляться с применением быстроходных винтовых передач, подсоединенных к шаговым двигателям. Отсчеты положений ОПУ и положений измерительной антенны на координатном устройстве осуществляются с помощью серийных кодовых датчиков перемещений отечественного или зарубежного производства, обладающих необходимой точностью.
Заявленная измерительная система и ее модификации могут применяться при экспериментальной отработке ГСН на стадии разработки опытных образцов, при серийном изготовлении ГСН и антенных обтекателей, а также при контроле технического состояния ГСН на ремонтных предприятиях и в сервисных центрах.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2012 |
|
RU2514197C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ЦЕЛЕЙ В МОНОИМПУЛЬСНОЙ ОБЗОРНОЙ РЛС И МОНОИМПУЛЬСНАЯ ОБЗОРНАЯ РЛС | 2004 |
|
RU2270458C1 |
| МОНОИМПУЛЬСНЫЙ ПЕЛЕНГАТОР | 2007 |
|
RU2361230C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2014 |
|
RU2553270C1 |
| Фазовый пеленгатор | 2016 |
|
RU2618522C1 |
| Способ обзорной пассивной однопозиционной моноимпульсной трёхкоординатной угломерно-разностно-доплеровской локации перемещающихся в пространстве радиоизлучающих объектов | 2017 |
|
RU2661357C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2271551C2 |
| СПОСОБ ТЕПЛОРАДИОТЕХНИЧЕСКИХ ИСПЫТАНИЙ РАДИОПРОЗРАЧНЫХ ОБТЕКАТЕЛЕЙ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2013 |
|
RU2525844C1 |
| ИНТЕГРИРОВАННАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ ДЛЯ ОБЪЕКТОВ С БЫСТРЫМ ВРАЩЕНИЕМ ВОКРУГ ПРОДОЛЬНОЙ ОСИ | 2014 |
|
RU2561003C1 |
| СПОСОБ АВТОКОРРЕЛЯЦИОННОГО ПРИЕМА ШУМОПОДОБНЫХ СИГНАЛОВ | 2015 |
|
RU2595565C1 |
Автоматизированная система измерений радиотехнических характеристик головок самонаведения ракет относится к области радиотехнических измерений и может быть использована для экспериментальной оценки радиотехнических характеристик головок самонаведения, содержащих антенну, защищаемую радиопрозрачным обтекателем. Заявленная система содержит дистанционно управляемое двухкоординатное опорно-поворотное устройство, содержащее датчики углового положения обтекателя (по курсу «α» и по тангажу «β»), пеленгационную антенну головок самонаведения, измерительные антенны (имитаторы цели), измерительные устройства (для измерения амплитудно-фазовых соотношений сигналов и относительных значений амплитуды), генератор (источник зондирующих излучений), управляющий компьютер. Технический результат заключается в повышении точности оценки пеленгационных ошибок, возможности первоначальной калибровки системы, учете пеленгационных ошибок по ортогональной координате, возможности измерений радиотехнических характеристик во всем секторе сканирования, высокая производительность измерений. 2 з.п. ф-лы, 3 ил.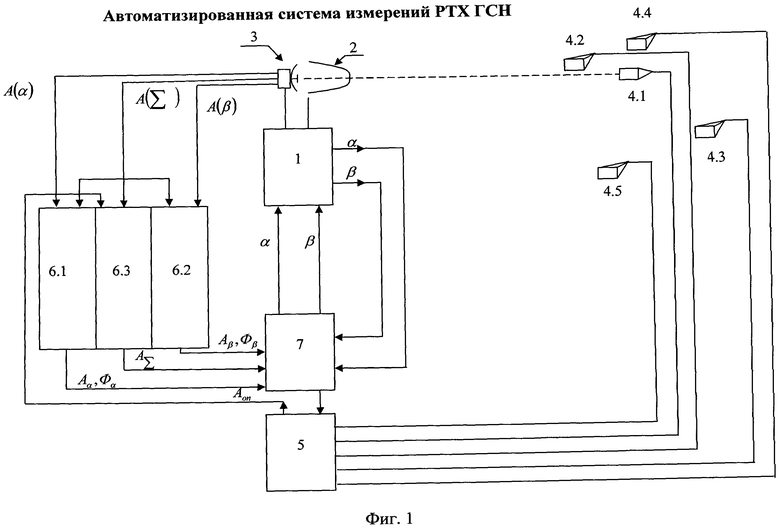
1. Автоматизированная система измерений радиотехнических характеристик головок самонаведения ракет (далее - система), включающая штатную антенну головок самонаведения (далее - антенна ГСН), опорно-поворотное устройство (ОПУ), обеспечивающее установку на него и управляемое перемещение измеряемых радиопрозрачных обтекателей антенны ГСН (далее - обтекатель) по двум ортогональным координатам, размещенную в дальней зоне антенны ГСН измерительную антенну, генератор зондирующих сигналов, выход которого подключен к измерительной антенне, отличающаяся тем, что опорно-поворотное устройство содержит датчики перемещения и дистанционно управляемые приводы по каждой координате перемещения обтекателя (по курсу и тангажу) относительно неподвижной антенны ГСН, в систему дополнительно введены измерители амплитудных и фазовых соотношений сигналов с выходов разностных каналов антенны ГСН по отношению к суммарному каналу антенны ГСН, измерительными входами подключенные к выходам разностных каналов антенны ГСН по курсу и тангажу, а опорными входами подключенные к выходу суммарного канала антенны ГСН, измеритель относительных значений амплитуды сигналов, измерительным входом подключенный к выходу суммарного канала антенны ГСН, а опорным входом подключенный к выходу опорного сигнала генератора зондирующих сигналов, управляющий компьютер, ко входам которого через интерфейсные шины подключены выходы измерителей амплитудно-фазовых соотношений сигналов разностных каналов антенны ГСН и измерителя относительных значений амплитуды сигналов суммарного канала антенны ГСН, а также выходы датчиков положения ОПУ по курсу и тангажу, а управляющие выходы компьютера через интерфейсные шины подключены ко входам дистанционно управляемых приводов ОПУ по курсу и тангажу, а также управляющему входу генератора зондирующих сигналов, при этом перед началом измерений в память управляющего компьютера введены калибровочные таблицы амплитудно-фазовых диаграмм разностных каналов антенны ГСН в отсутствии обтекателя, предназначенные для определения измеряемых значений радиотехнических характеристик при различных положениях обтекателя относительно антенны ГСН.
2. Система по п.1, отличающаяся тем, что в нее дополнительно введено координатное устройство, содержащее дистанционно управляемые приводы перемещения измерительной антенны по координатам «X» и «Y» в плоскости, перпендикулярной равносигнальному направлению разностных каналов антенны ГСН при снятом обтекателе, и датчики положения измерительной антенны по координатам «X» и «Y», входы дистанционно управляемых приводов и выходы датчиков положения измерительной антенны подключены через интерфейсные шины к соответствующим выходам и входам управляющего компьютера, измерительная антенна установлена на координатное устройство с возможностью перемещения в плоскости «XY» таким образом, что ее исходное положение (l xo, l yo) перед началом измерений соответствует положению равносигнального направления антенны ГСН при снятом обтекателе, а текущие значения координат (l xi, l yi) положения измерительной антенны соответствуют измеряемым значениям пеленгационных ошибок для текущего углового положения (αi, βi) обтекателя относительно антенны ГСН.
3. Система по п.1 или 2, отличающаяся тем, что при использовании антенны ГСН, содержащей штатные смесители и усилители промежуточной частоты разностных каналов по курсу и тангажу и суммарного канала, измеритель амплитудно-фазовых соотношений разностных каналов по курсу и тангажу, а также измеритель амплитудных соотношений суммарного канала, работают на промежуточной частоте и подключены к соответствующим выходам усилителей промежуточной частоты разностных и суммарного каналов антенны ГСН, в качестве генератора зондирующих сигналов используется синтезатор частоты, выход зондирующего сигнала которого подключен к измерительной антенне, гетеродинный выход подключен к смесителям антенны ГСН, а выход опорного сигнала на промежуточной частоте подключен ко входу опорного сигнала измерителя амплитудных соотношений суммарного канала.
| ИЗМЕРИТЕЛЬ ПЕЛЕНГАЦИОННЫХ ХАРАКТЕРИСТИК СИСТЕМ АНТЕННА-ОБТЕКАТЕЛЬ | 2005 |
|
RU2287834C1 |
| ВЕРТОЛЕТНЫЙ РАДИОЛОКАЦИОННЫЙ КОМПЛЕКС | 2007 |
|
RU2344439C1 |
| JP 2005045668 A 17.02.2005 | |||
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ РАДИОТЕХНИЧЕСКИХ ХАРАКТЕРИСТИК СИСТЕМ АНТЕННА-ОБТЕКАТЕЛЬ | 1997 |
|
RU2133478C1 |
| Устройство для измерения угловых ошибок | 1972 |
|
SU459744A1 |
| УСТРОЙСТВО СЕЛЕКЦИИ САМОНАВОДЯЩИХСЯ ПРОТИВОРАДИОЛОКАЦИОННЫХ РАКЕТ | 1998 |
|
RU2155353C2 |

