Изобретение относится к устройствам приема радио- и телевизионных сигналов, располагаемых на подвижных носителях, и может быть использовано при создании аппаратуры для приема программ спутникового телевидения, устанавливаемой, в частности, на маломерных плавсредствах, как-то: прогулочные катера, яхты, небольшие торговые и пассажирские суда.
Известна корабельная антенная система стабилизации горизонтального направления луча (заявка ЕПВ N 0373257), которая содержит гироскоп и соединенные с ним датчики килевой и бортовой качки. Недостатком устройства является его ограниченные функциональные возможности. К недостаткам этого устройства, как и устройств по заявкам Японии N 62-190902 и ФРГ N 4237994, следует отнести также необходимость использования для организации стабилизации положения приемной антенны в условиях качки и эволюций судна бортовых систем судовождения и навигации, таких как гировертикаль (гирогоризонт) или гироазимут-горизонт, эти гироскопические системы являются сложными и дорогими, располагаемыми близ центра масс судна, где минимальны по величине возмущения от линейных ускорения переносных движений при качке. В этом случае антенные устройства являются неавтономными. К тому же маломерные суда такими сложными системами навигации не оснащаются в силу их дороговизны.
Наиболее близким по своему техническому решению к заявляемому устройству является изобретение по заявке Японии N 62-190902. Устройство содержит антенну, установленную на трехосной конструкции карданова подмеса, каждая из осей которого снабжена двигателем и датчиком угла поворота оси. Устройство включает в себя также систему автоматического управления, содержащую вычислители, определяющие углы коррекции осей, в соответствии с которыми в блоки управления двигателями подаются сигналы на соответствующие развороты осей двигателями. Кроме того, оси угла места и крена снабжены датчиками абсолютного угла (датчиками горизонта).
Однако указанное устройство не позволяет получить достаточную точность стабилизации положения приемной антенны в условиях повышения параметров (амплитуды и частоты) качки и интенсификации эволюций судна, во-первых, из-за высоких погрешностей датчиков горизонта при существенных линейных ускорениях от переносного движения качающейся палубы и, во-вторых, из-за значительных величин кардановой ошибки при больших углах качки.
Задачей заявляемого устройства является повышение точности стабилизации положения приемной антенны при обеспечении автономности устройства.
Это достигается тем, что антенное устройство, содержащее антенну, укрепленную на поворотной оси угла места трехосного карданова подвеса, каждая из осей которого снабжена двигателем и датчиком угла поворота оси, причем двигатели и датчики углов всех трех осей подключены к системе автоматического управления устройства, снабжено платформой-маятником, подвешенной к оси угла места. Платформа-маятник снабжена двигателем и датчиком угла поворота платформы-маятника вокруг оси угла места. Кроме того, на платформе-маятнике установлены двухкоординатный датчик угловой скорости и двухкоординатный датчик линейного ускорения. Двигатель и датчик угла платформы-маятника, а также датчики угловой скорости и линейного ускорения подключены к системе автоматического управления устройства.
Заявляемая совокупность элементов и связей позволяет достичь поставленную цель изобретения за счет использования стабилизируемой платформы-маятника, положение которой относительно антенны по углу места автоматически регулируется двигателем платформы-маятника.
При изучении известных технических решений в данной области техники совокупность признаков, отличающих заявляемый объект, не была выявлена. Данное решение существенно отличается от известных.
Заявляемое решение явным образом не следует из уровня техники и имеет изобретательский уровень.
Заявляемое решение может быть реализовано на современных материалах и компонентах и является промышленно применимым.
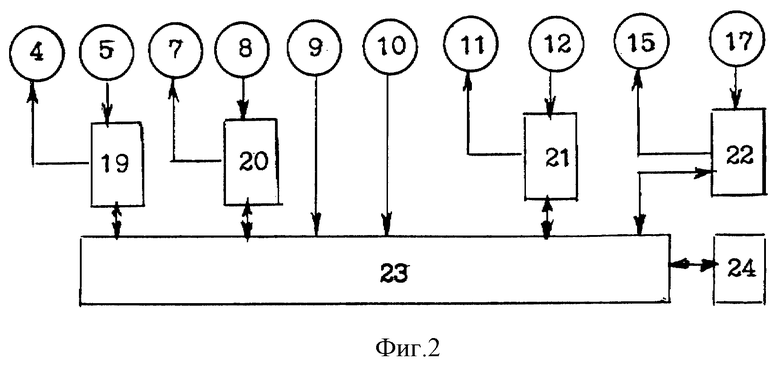
Прилагаемые чертежи поясняют суть устройства. На фиг. 1 показано одно из конструктивных решений кинематической схемы опорно-поворотного устройства с антенной. На фиг. 2 представлена функциональная схема системы автоматического управления двигателями опорно-поворотного устройства. На чертежах обозначено:
1 - антенна,
2 - поворотная ось угла места,
3 - рама карданова подвеса,
4 - двигатель угла места,
5 - датчик угла места,
6 - платформа-маятник,
7 - двигатель платформы-маятника,
8 - датчик угла поворота платформы-маятника,
9 - двухкоординатный датчик угловой скорости,
10 - двухкоординатный датчик линейного ускорения,
11 - двигатель угла крена,
12 - датчик угла крена,
13 - поворотная ось угла крена,
14 - вилка карданова подвеса,
15 - двигатель азимута,
16 - поворотная ось азимута,
17 - датчик угла азимута,
18 - палуба судна,
19 - блок управления двигателем угла места,
20 - блок управления двигателем платформы-маятника,
21 - блок управления двигателем угла крена,
22 - блок управления двигателем азимута,
23 - контроллер,
24 - пульт управления.
Устройство состоит из антенны, опорно-поворотного устройства, на котором крепится антенна, и системы автоматического управления двигателями опорно-поворотного устройства.
Опорно-поворотное устройство крепится на палубе судна. Оно представляет собой трехосную конструкцию карданова подвеса.
Антенна 1 (фиг. 1) жестко соединена с поворотной осью 2, установленной в раме 3 карданова подвеса. С осью 2 соединен двигатель 4, установленный на раме 3. Двигатель 4 предназначен для изменения положения антенны 1 по углу места. Ее положение контролируется датчиком угла 5, который также установлен на раме 3 и соединен с поворотной осью 2. К оси 2 подвешена платформа-маятник 6. Двигатель 7 и датчик угла 8 механически связаны с осью 2 и платформой-маятником 6. Двигатель 7 предназначен для поворота платформы-маятника 6 вокруг оси 2 и удержания ее в требуемом угловом положении относительно оси 2, а следовательно, относительно антенны 1. Контроль за угловым положением платформы-маятника 6 осуществляется датчиком угла 8.
На платформе-маятнике 6 установлены двухкоординатный датчик угловой скорости 9 и двухкоординатный датчик линейного ускорения 10. Конструктивно каждый из двухкоординатных датчиков 9 и 10 может быть выполнен из двух однокоординатных датчиков.
Платформа-маятник 6 вместе с антенной 1 и рамой 3 образуют единый неуравновешенный и самоориентирующийся по абсолютным углам места и крена в вертикальном направлении инерционный объект, в котором угол положения платформы-маятника 6 относительно антенны 1 является регулируемым параметром.
Угол крена антенны 1, а соответственно платформы-маятника 6 и рамы 3, изменяется с помощью двигателя 11 и контролируется датчиком угла 12. Двигатель 11 и датчик 12 соединены с осью 13 рамы 3 и установлены на вилке 14 карданова подвеса. Азимутальный двигатель 15 соединен с осью 16 вилки 14 и вращает раму 3 с антенной 1 и платформой-маятником 6. Контроль поворота оси 16 осуществляется датчиком угла 17, который соединен с осью 16. Ось 16, двигатель 15 и датчик угла 17 установлены на палубе 18 судна.
Датчик 5 угла места (фиг. 2) включен на вход блока 19 управления двигателем угла места, выход которого подключен к двигателю 4 угла места. Датчик 17 угла азимута подключен к входу блока 22 управления двигателем азимута, к выходу которого подключен двигатель 15 азимута. Датчик 12 угла крена подключен к выходу блока 21 управления двигателем угла крена, выход которого подключен к двигателю 11 угла крена.
Датчик 8 угла поворота платформы-маятника подключен к входу блока 20 управления двигателем платформы-маятника, выход которого подключен к двигателю 7 платформы-маятника.
Входы-выходы блоков управления 19, 20, 21, 22 подключены соответственно к первому, второму, третьему и четвертому входу-выходу контроллера 23. На пятый вход-выход контроллера 23 включен вход-выход пульта 24 управления.
Выход двухкоординатного датчика 9 угловой скорости подключен на первый вход контроллера 23, на второй вход которого подключен выход двухкоординатного датчика 10 линейного ускорения.
Устройство работает следующим образом. Целеуказание по углу места поступает с пульта 24 управления в контроллер 23, где сравнивается с показаниями датчиков 8 угла поворота платформы-маятника. Полученное рассогласование усиливается в блоке 20 управления двигателем платформы-маятника и отрабатывается двигателем 7. Платформа-маятник 6 разворачивается относительно оси 2, а соответственно и антенны 1, на угол, численно равный целеуказанию, и удерживается двигателем 7 в этом положении. Под действием сил тяжести платформа-маятник 6 стремится занять вертикальное положение, при этом ее площадка с датчиками 9 и 10 скоростей и ускорений и осью 2 занимают горизонтальное положение, а ось 2 вместе с антенной 1 выводятся по абсолютному углу места на угол, численно равный углу разворота платформы-маятника. Тем самым осуществляется наведение антенны в земном пространстве по углу места при нулевом угле крена.
Сигналы с двухкоординатного датчика 9 угловой скорости и двухкоординатного датчика 10 линейного ускорения поступают в контроллер 23. Контроллер 23 суммирует с требуемыми коэффициентами передачи сигналы абсолютной продольной угловой скорости и абсолютного продольного линейного ускорения. Полученная сумма усиливается в блоке 19 управления двигателем угла места и преобразуется двигателем 4 в пропорциональный крутящий момент, приложенный к оси 2 относительно рамы 3. Полярностью и коэффициентом передачи сигнала угловой скорости обеспечивается демпфирование угловых колебаний инерционного объекта по абсолютному углу места, а полярностью и коэффициентом передачи сигнала линейного ускорения обеспечивается компенсация дестабилизирующего момента неуравновешенности от ускоренного переносного движения оси 2 угла места. Тем самым осуществляется активная стабилизация положения антенны в земном пространстве по углу места в условиях качки носителя.
Аналогично стабилизируется положение антенны по абсолютному углу крена, при этом от датчиков 9 и 10 используются сигналы абсолютной поперечной угловой скорости и абсолютного поперечного линейного ускорения платформы-маятника 6. Контроллер 23 суммирует эти сигналы с требуемой полярностью и коэффициентами передачи, полученная сумма усиливается блоком 21 управления двигателем угла крена и пропорционально преобразуется двигателем 11 в крутящий момент, приложенный к раме 3 относительно вилки 14. Данный момент демпфирует угловые колебания инерциального объекта по углу крена и компенсирует момент неуравновешенности от ускоренного переносного движения оси 13 угла крена.
Если положение объекта застабилизировано по абсолютным координатам углов места и крена, то сигналы датчиков относительных координат - датчика 5, измеряющего угол поворота рамы 3 по углу места, и датчика 12, измеряющего угол поворота рамы 5 по углу крена - становятся пропорциональны углам качки судна в продольной и поперечной плоскостях соответственно. Это индикаторное свойство стабилизированной платформы-маятника используется для управления азимутом антенны.
Целеуказание по курсовому углу антенны 1, отсчитываемому в плоскости горизонта и представляющему собой разность задаваемого угла азимута антенны и текущего курса носителя (судна), поступает в контроллер 23 с пульта управления 24, а данные о фактическом курсовом угле антенны, отсчитываемом в плоскости палубы 18, поступают с датчика 17 угла азимута. Контроллер 23 осуществляет преобразование координат с учетом поступающей в него с датчиков 5 и 12 информации о текущих значениях углов продольной и поперечной качки судна и сравнивает одинаково отсчитываемые (одноименные) задаваемый и тактический курсовые углы антенны. Полученное рассогласование усиливается в блоке 22 и отрабатывается двигателем 15 азимута. Тем самым осуществляется наведение и стабилизация антенны в земном пространстве по азимуту в условиях качки и изменения курса.
Заявляемое техническое решение опробовано в макете и показало высокую эффективность работы.
Изобретение относится к устройствам приема радио- и телевизионных сигналов, располагаемых на подвижных носителях. Техническим результатом является повышение точности стабилизации приемной антенны при обеспечении автономности устройства. Это достигается тем, что антенное устройство, содержащее антенну 1, укрепленную на поворотной оси 2 угла места трехосного карданова подвеса, каждая из осей которого снабжена двигателем и датчиком угла поворота оси, причем двигатели и датчики всех трех осей подключены к системе автоматического управления устройства, снабжено платформой-маятником 6, подвешенной к оси 2 угла места, а также двигателем 7 и датчиком 8 угла поворота платформы-маятника вокруг оси угла места. Кроме того, на платформе-маятнике установлены двухкоординатный датчик 9 угловой скорости и двухкоординатный датчик 10 линейного ускорения. Двигатель 7, датчики 8, 9 и 10 подключены к системе автоматического управления устройства. 1 з.п. ф-лы, 2 ил.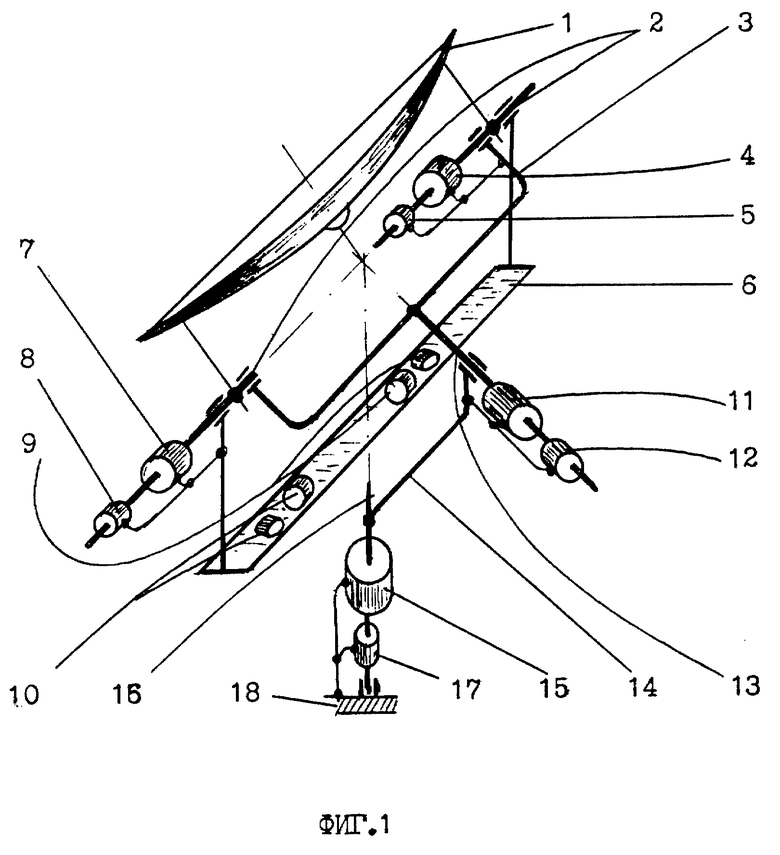
| Способ крашения тканей | 1922 |
|
SU62A1 |
| Поворотное устройство антенны | 1987 |
|
SU1422270A1 |
| Способ изготовления волокнистой ленты из резаного жгута и машина для осуществления способа | 1957 |
|
SU108478A1 |
| МАШИНА ДЛЯ ГРОХОЧЕНИЯ (ВАРИАНТЫ), СПОСОБ ГРОХОЧЕНИЯ (ВАРИАНТЫ) И СПОСОБ УСТРАНЕНИЯ ЗАКУПОРИВАНИЯ ГРОХОТА | 2002 |
|
RU2266164C2 |
| СПОСОБ ПРОФИЛАКТИКИ РЕЦИДИВНОГО КАМНЕОБРАЗОВАНИЯ | 2006 |
|
RU2320368C1 |
| US 4609083 A, 02.09.1986. | |||
