(54) РОЛЬГАНГ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для изменения направлениядВижЕНия лЕСОМАТЕРиАлОВ | 1979 |
|
SU796108A1 |
| АВТОМАТИЧЕСКИЙ ВАРИАТОР ФМВ | 1995 |
|
RU2088428C1 |
| Рольганг | 1978 |
|
SU763208A1 |
| АВТОМАТИЧЕСКАЯ КОРОБКА ПЕРЕДАЧ ФМВ | 1993 |
|
RU2061600C1 |
| Узел приводного рольганга | 1983 |
|
SU1143672A1 |
| КОЛЕСНО-ГУСЕНИЧНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2009 |
|
RU2407668C2 |
| Приводной винтовой ролик рольганга | 1979 |
|
SU796102A1 |
| Приводной винтовой ролик рольганга (его варианты) | 1979 |
|
SU854831A1 |
| Приводной винтовой ролик рольганга | 1977 |
|
SU630156A1 |
| Приводной винтовой ролик | 1976 |
|
SU740631A2 |
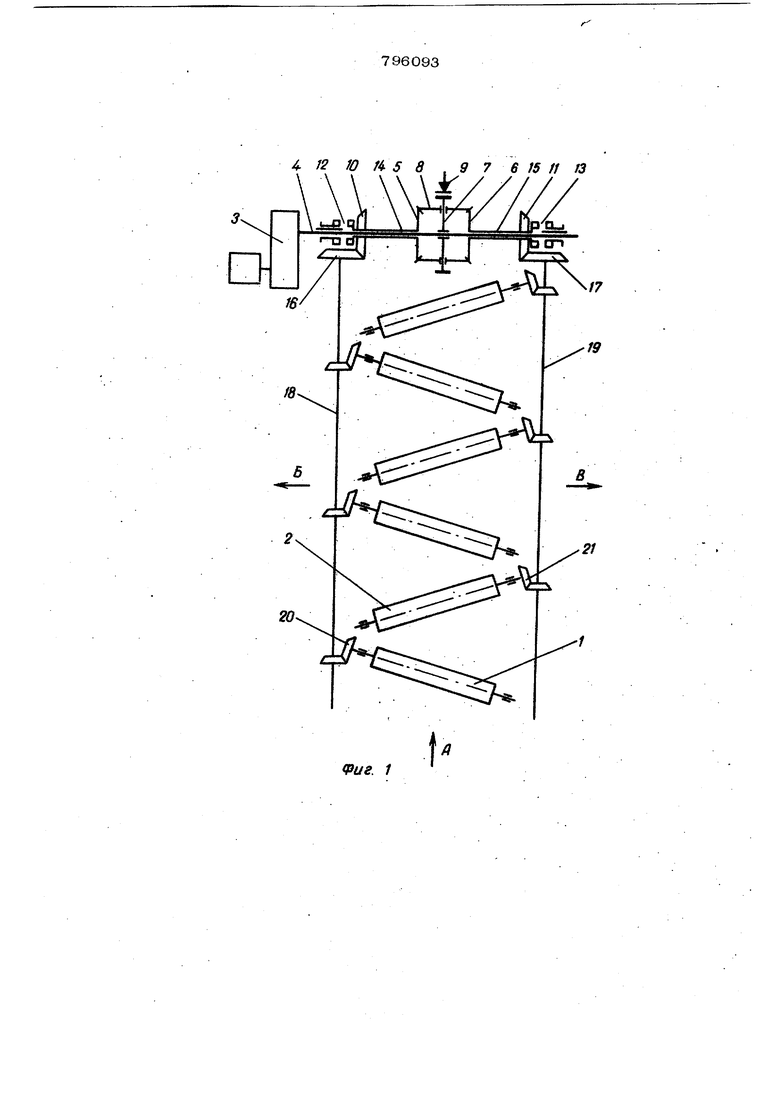
Изобретение относится к роликовым конвейерам и предназначено для транс- портирования, например лесоматериалов, на деревообрабатывающих предприятиях. Известен рольганг, содержащий связа ные с реверсивным приводом две группы роликов ll. Однако этот рольганг конструктивно сложен и недостаточно надежен в работе что обусловлено наличием двух отдельны реверсивных приводов. Частое реверсиро вание приводов в прсщессе работы роньганга снижает срок их службы и увеличивает эксплуатационные расходы. Цель изобретения - повышение надеж ности рольганга. Цель достигается тем, что рольганг снабжен соединенным с двигателем привода промежуточным валом, свободно установленными на последнем втулками и дифференциалом, водило которого снабжено тормозом, а шестерни жестко соеди нены с упомянутыми втулками, причем каждая из последних кинематически связана с одной из групп роликов и снабжена муфтой для Соединения с указанным промежуточным валом. На фиг.1 схематически изображен рольганг с наклонно расположенными роликами, план; на фиг.2 - то же,, с винтовыми роликами. РоЯьганг состоит из двух групп 1 и 2 роликов, причем ролики группы 1 размещены между роликами группы 2 и наоборот. Ролики каждой группьг расположены параллельно друг другу И установлены с наклоном в противоположные стороны относительно продольной оси рольганга. Рольганг содержит привод 3, соединенный с промежуточным валом 4, на котором размещен конический дифференциал, состоящий из шестерен 5 и 6, во- дила 7 и сателлитов 8. Шестерни 5 и 6 и водило 7 установлены на валу 4 свободно. Водило 7 снабжено тормозом 9. На валу 4 свободно установлены приводные шестерни 1О и 11, соединяемые с валом 4 муфтами 12 и 13 сцепления.
Шестерни 10 и 11 жестко соединены с шестернями 5 и 6 соответственно при помощи втупок 14 и 15. Шестерни 10 и 11 кинематичесщ соединены с роликами групп 1 и 2 соответственно при помоши шестерен 16 и 17, продольных валов 18 и 19 и конических пар 2О и 21, Рольганг работает следующим образом При включении привода 3 вап 4 начинает вращаться. Включением муфт 12 и 13 сцепления к приводу присоединяются шестерни 10 и 11, 16 и 17, передающие вращение валам 18 и 19 и соединенным с ними парами 2О и 21 группам роликов 1 и 2. Тормоз 9 в это время отключен и шестерни 5 и 6 дифферейциа- ла совместно с сателлитами 8 вращаются свободно на валу 4, не оказывая влияния на работу рольганга. При вращении ролики группы 1 стремятся сдвинуть груз с оси рольганга в одну сторону (на фиг.1вправо) ролики группы 2 - в противоположную сторону (влево). В результате их совместного взаимодействия на груз последний транспортируется вдоль продопь ной оси рольганга по стрелке А {см.фиг. 1).
Для сброса груза на сторону, например влево, отключают муфту 12 и включают тормоз 9. Водило 7 фиксируется в неподвижном положении. Вращение от шестерни 6 через сетеплит 8 передается шестерне 5, которая теперь начнет вращаться в обратном направлении, а следовательно, и ролики группы 1, кинематически связанные с шестерней 5, начнут вращаться также в обратном направпенин В результате действия на груз роликов группы 2, вращайщихся в прямом направлении и роликов группы 1, вращающихся во встречном направлении, груз с рольганга будет сбрасываться влево по стреп ке Б (см.фиг.1). Если необходимо сбросить груз с рольганга вправо, поступают аналогичным образом, но отключают му( ту 13 с включением тормоза 9.. ролики группы 1 будут вращаться в прямом направлении, а ролики группы 2 через дифференциал получают обратное вращение, в результате чего груз будет сбрасываться с рольганга вправо по стреке В (см.фиг.1).
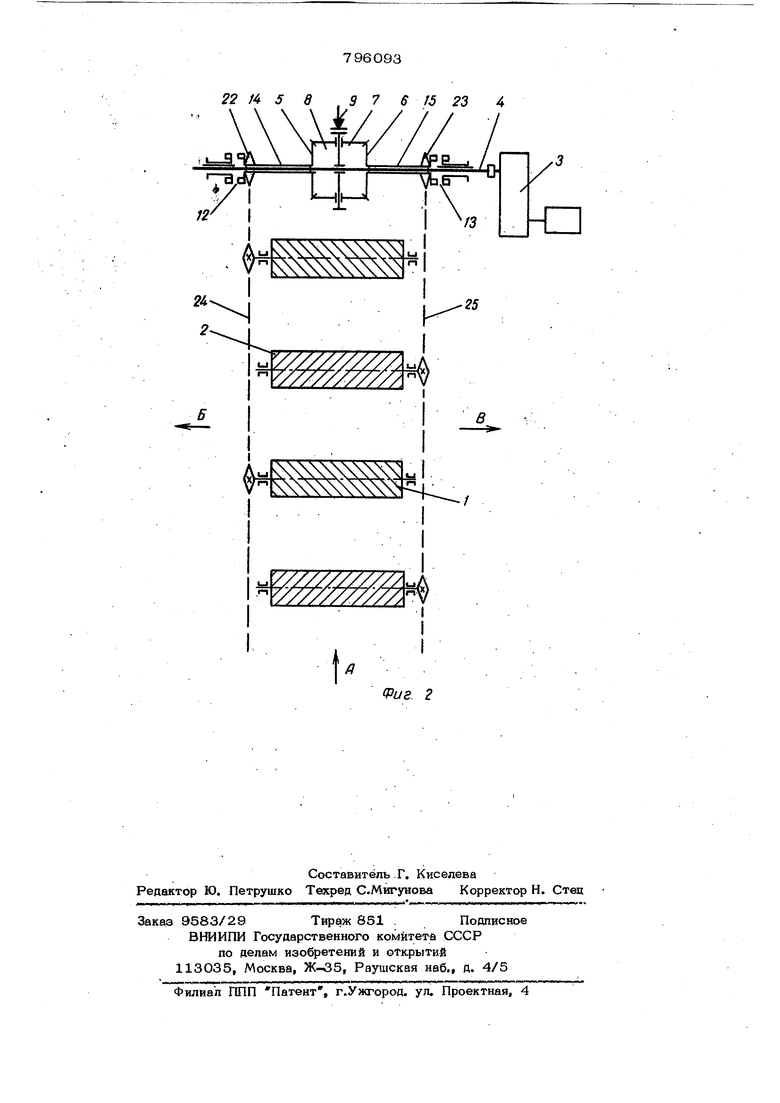
Предложенное устройство может быть использовано и в рольгангах, оборудованных Винтовыми роликами (см.фиг.2). В этом случае на втулках 14 и 15, связанных с щестернями дифференциала, закрепляются приводные звездочки 22 и 23 соединенные цепными гяговымн органрми 24 и 25 с группами роликов 1 и 2. Ролики каждой группы выполняются с винтовой навивкой противоположного направ- ления и размаиваются поочередно вдоль прюдольной оси рольганга.
груза с этого рольганга осуществляют аналогичным образом, т.е. отключают муфты 12 или 13 (т.е. муфты той стороны рольганга, куда необходимо сбросить груз) и включают дополнитель- но тормоз 9. Груз с рольганга сбрасывается противоположно направленной и встречно вращающейся навивкой роликов.
Формула изобретения
Рольганг, содержащий связанные с реверсивным приводом две группы роликов, отличающийся тем, что, с целью повышения надежности, он снабжен соединенным с двигателем привода промежуточным валом, свободно установленным на последнем втулками и дифференциапом, водило которого снабжено тормозом, а шестерни жестко соединены с упомянутыми втулками, причем каждая из последних кинематически связана с ойцой из групп роликов и снабжена муфтой для соединения с указанным промежуточным валом.
Источники инфс мации, принятые во внимание при : .экспертизе
4- 12 Ю /45 8 . 9 7 6 }5 ff 3
20
fPue. 1
.
