(54) УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ЦЕНТРИГОВАНИЯ

| название | год | авторы | номер документа |
|---|---|---|---|
| Оптико-электронное устройство для автоматического центрирования линз | 1980 |
|
SU972293A1 |
| Цифроаналоговая следящая система | 1989 |
|
SU1700536A1 |
| Устройство для автоматической центрировки оптических компакт-дисков | 1989 |
|
SU1704159A1 |
| Двухотсчетный следящий привод | 1989 |
|
SU1700535A1 |
| Двухканальный цифроаналоговый следящий привод | 1988 |
|
SU1631517A1 |
| УСТРОЙСТВО И СПОСОБ ОЦЕНКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ АСИНХРОННЫХ ДВИГАТЕЛЕЙ | 2019 |
|
RU2711647C1 |
| Система управления для остановки шпинделя в определенном угловом положении | 1980 |
|
SU1308185A3 |
| Устройство для контроля изделий с прерывистой винтовой поверхностью | 1985 |
|
SU1293478A1 |
| СПОСОБ КОНТРОЛЯ ФОРМЫ ПОРШНЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2403535C1 |
| ПОВОРОТНЫЙ УГЛОМЕРНЫЙ СТОЛ | 2015 |
|
RU2596693C1 |
Изобретение относится к измерительной технике и может быть использовано в кругломерах и измерительных маигаиах. Известно устройство для автоматического центрирования, содержащее шпиидель, каретку измерительным преобразователем, установленную на шпинделе с возможностью поперечного перемещения, сервопривод каретхи, преобразователь углового положения шпинделя, два сервопривода центрировашя и вычислитет. При обкатывании центрируемой датали нзме{жтельным преобразователем по его сигналам и сигналам преобразователя углового положения шпинделя, вычислитель вырабатывает сигналы, пропорциональные пррекшсям эксцентриситета, пост шанпцие в сервоприводы ценп ирования и управляющие перемещением детали относительно оси цпшнделя, и сигнал, пропорциональный отклонению траектории измерительного . преобразователя от средней окружности сечения детали, поступающий в сервопривод каретки и управляющий ее перемещением {. Недостатком этого устройства является невозможность автоматического центрироваш1Я детали при начальном эксцентриситете, превышающем рабоФ1й ход измерительного преобразователя. Шль изобретения - автоматизация центрирования при начальном эксцентриситете, превыщающем рабочий ход измер ительного преобразователя. Указанная цель достигается тем, что устройство для автоматического центрирования снабжено корректором амплитуда, вход которото соединен с выходом измерительного преобразователя, корректором фазы, вход которого соединен с выходом преобразователя, углового положения щпинделя анализатором, входа 1 которого соединены с двумя выходами вычислителя, переключателем, имеющим управляющий вход, соединенный с выходом анализатора, и обеспечивающим подключение на время грубого центрирования входа сервопривода каретки к выходу измерительного преобразователя и входов вычислителя к выходам ксфректора амплитуды и корректора фазы, a на время .точного центрирования - входов вычислителя к выходам измерительного пре379
образователя и преобразователя углового поло женин шпинделя и третьего выхода вычислителя к входу сервопривода каретки.
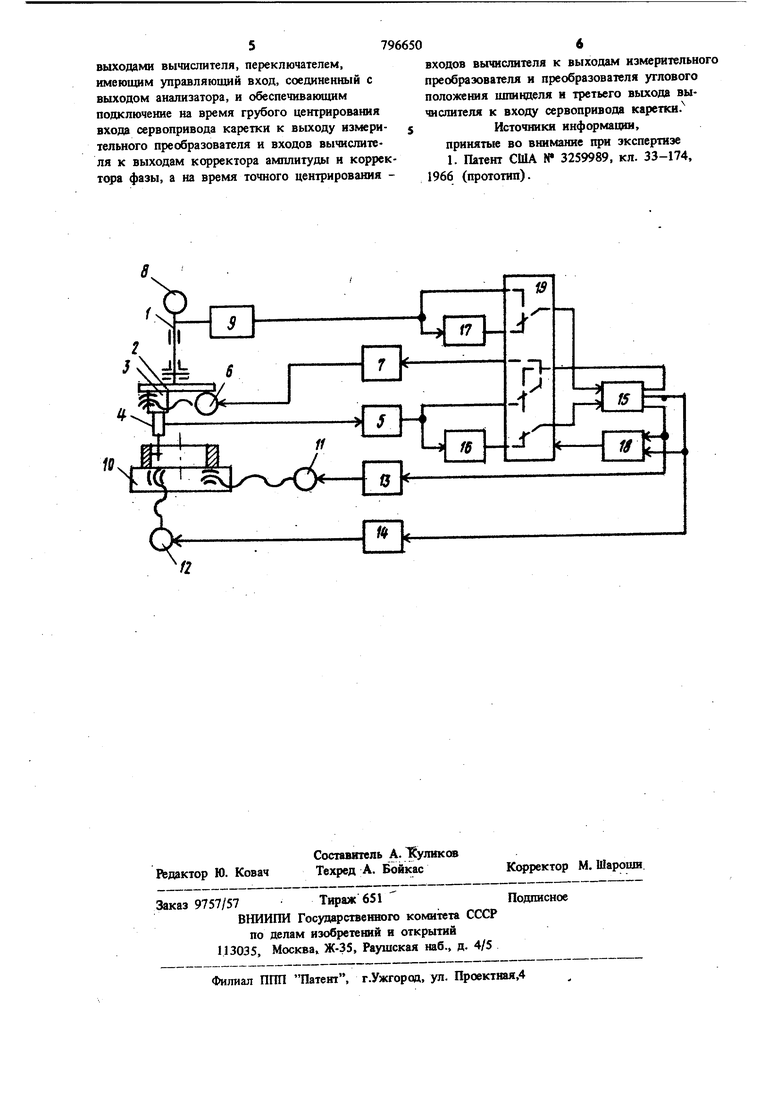
На чертеже показана схема устройства для автоматического центрирования.Устройство содержит шпиндель 1 с направляющей 2, по. которой перемещается каретка 3 с измерительным преобразователем 4, имеющим усилитель 5, сервопривод каретки, состоящий из двигателя 6 и преобразователя 7 привода . каретки 3, привод 8 шпинделя, преобразователь 9 углового положения шпинделя, центрирующий стол 10, на который устанавливается измеряемая деталь и который может перемещаться в двух направлениях при помощи двух сервоприводов . центрирования, включающих в себя соответственно двигатели 11 и 12 и преобразователи 13 и 14 приводов центрирования, вычислитель 15, корректор 16 амплитуды, корректор 17 фазы, анализатор 18 и переключатель 19. Вход корректора 16 амплитуды соединен с выходом усилителя 5 измерительного преобразователя 9 углового положения шпинделя. Входы анализатора 18 соединены с двумя выходами вычислителя 15, а выход
анализатора 18 соединен с управляющим входом переключателя 19. Переключатель 19 может иметь два положения. В первом положении, соответствующем грубому центрированию, переключатель 19 соединяет вход преобразователя 7 привода каретки с выходом усилителя 5, и входы вычислителя 15 - к выходам корректора 16 амплитуды и корректора 17 фазы. Во втором положении, соответствующем точном центрированию, переключатель 19 соединяет входы вычислителя 15 с выходами усилителя 5 и преобразователя 9 углового положения шпинделя и третий выход вычислителя 15 - с входом преобразователя 7 привода каретки 3.
Устройство для автоматического центрирования работает следующим образом.
В начале центрирсжания переключатель 19 находится в положении, соответствующем грубому центрированию. Измерительный преобразователь 4 вращается относительно прверхности измеряемой детали. Сигнал измерительного преобразователя 4, усиленный усилителем 5, поступает в преобразователь 7 привода каретки 3, в результате чего щуп измерительного преобразователя 4 следит за поверхностью детали, так что ход щупа не превышает величины его рабочего хода, а сигнал рассогласования - величины максимального рабочего диапазона преобразователя. Сигнал рассогласования кcq)ректируется по амплитуде корректором 16 амплитуды и подается в вычислитель 15. Сюда же поступает сдвинутый по фазе корректором 17 фазы сигнал преобразователя 9 углового положения шпинделя. Вь1числитель 15 вырабатывает управляющие сигналы, поступающие на преобразователи 13 и 14 приводов центрирования, которые, отрабатывая команду, перемещают стол 10 с деталью и уменьшают ее эксцентриситет относительно оси шпинделя.
Работа устройства при грубом центрировании основывается на том, что в режиме слежения сигнал рассогласования приближается к производной от сигнала измерительного преобразователя 4 при остансжленном приводе его каретки. Коррекция амплитуды сигнада рассогласования обеспечивает одинаковый коэффициент передачи вычислителя 15 при грубом и точном центрировании, а коррекция фазы сигнала преобразователя 9 углового положения щпинделя обеспечивает соответствие направлени центрирующего перемещения направлению зксцентриситета. Величина коррекции амплитуды и фазы подбирается для конкретных параметров устройства центрирования расчетным или экспериментальным путем. Управляющие сигналы анализируются анализатором 18 и при уменьшении амплитуды сигнала ниже заданного уровня, соответствующего эксцентриситету меньшему, чем рабочий ход измерительного преобразователя 4, производится переключение переключателя 19 во второе положение. Далее осуществляется точное центрирование описанным образом.
Применение предлагаемого устройства позволяет автоматизировать процесс грубого центрирования и тем самым повысить производительность измерения на измерительных ма шинах.
Формула изобретения
Устройство для автоматического центрирования, содержащее щпиндель, каретку с изм {штельным преобразователем, установлен1 ю на шпинделе с возможностью поперечного перемещения, сервопривод каретки, преобразователь углового положения шпивделя, два сервопривода центрирования и вычислитель, два выхода которого соединены с входами сервоприводов центрирования, а третий предназначен для получения сигнала, пропорционального отклонению траектории измерительного преобразователя от федней окружности, отличающееся тем, что, с целью автоматизации центрирования при начальном эксцентриситете, превышающем рабочий ход измерительного преобразователя, оно снабжено корректором амплитуды, вход которого соединен с выходом измерительного преобразователя, корректором фазьь вход которого соединен с выходом преобразователя углового положения щпинделя, анализатором, входы которого соединены с первыми двумя 579 выходами вычислителя, переключателем, имеющим управляющий вход, соединеииый с выходом аиализатора, и обеспечивающим подключение на время грубого центрирования входа сервопривода каретки к выходу измерительного преобразователя и входов вычислителя к выходам корректора амплитуды и корректора фазы, а на время точного центрирования входов вычислителя к выходам измерительного преобразователя и преобразователя углового положения шпинделя и третьего выхода вычислителя к входу сервопривода каретки. Источники информации, принятые во внимание при экспертизе 1. Патент США № 3259989, кл. 33-174, 1966 (прототип).
