Изобретение относится к области электротехники и может быть использовано для диагностирования технического состояния асинхронных двигателей в процессе работы, в том числе на железнодорожном транспорте.
Известно устройство диагностики работоспособности
электромеханической системы (патент РФ на полезную модель изобретение №146950), содержащее объект диагностики, измерительный блок, аналого-цифровой преобразователь, приемное устройство, отличающееся тем, что дополнительно введены коммутатор измерительных каналов, блок аппаратуры синхронизации, устройство первичной обработки сигналов, включающее блок нейросетевой селекции измерительных сигналов, блок формирователя временных сигналов, блок нейросетевой адаптации частоты опроса селектированных параметров, блок буферного запоминающего устройства, блок формирователя группового диагностического сигнала, устройство нейросетевого анализа, включающее блок селекции и декодирования группового сигнала, блок синхронизации, блок обработки и формирования абсолютных значений, блок формирования обучающей выборки нейронной сети, блок базы данных, блок нейросетевой диагностики, пульт оператора.
Недостатком предлагаемого устройства является отсутствие возможности проведения частотного анализа сигналов, как следствие снижение уровня достоверности диагнозов.
Известен способ диагностики механизмов и систем с электрическим приводом (патент РФ на изобретение №2641318), в котором реализуется запись значений фазных токов и напряжений электродвигателя в течение заданного интервала времени и с заданной периодичностью, разложение их на гармонические составляющие с помощью быстрого преобразования Фурье и измерение амплитуды и фазы гармонических составляющих, фильтрацию гармонических составляющих, преобразование полученного сигнала из аналоговой в цифровую форму, идентификацию технического состояния и прогнозирование ресурса безаварийной работы диагностируемого объекта по совокупности параметров гармонических составляющих фазных токов и напряжений, генерируемых электродвигателем, и динамики их изменения, согласно изобретению используют искусственную нейронную сеть, которая идентифицирует техническое состояние объекта с применением коэффициентов искажения кривой тока и кривой напряжения для каждого интервала времени с выдачей результата - кода возможного дефекта, анализирует и прогнозирует техническое состояние объекта с применением интегрального параметра поврежденности за весь исследуемый период времени и выдает результат возможного значения параметра поврежденности будущего измерения через тот же интервал времени. При этом для обучения искусственной нейронной сети применяют теорию планирования эксперимента, а для более точной оценки технического состояния механизмов и систем с электрическим приводом используют синусоидальные составляющие напряжений и токов, не являющиеся кратной основной частоте - интергармоники, которые позволяют проследить явные изменения целочисленных гармоник.
Недостатком предлагаемого способа является отсутствие анализа вибрации подшипниковых узлов и крутящего момента двигателя.
Известно устройство дистанционной диагностики асинхронных электродвигателей (патент РФ на полезную модель №147268), содержащее блок датчиков тока, блок датчиков напряжения, блок датчиков температуры изоляции обмотки статора и блок датчиков температуры подшипников, при этом выходы датчиков тока и напряжения подключены через блоки аналоговых цифровых преобразователей к блоку прямого преобразования Фурье, к выходу блока прямого преобразования Фурье подключен блок нейронной сети, а выходы датчиков температуры изоляции обмотки статора электродвигателя и датчиков температуры подшипников подключены через блоки аналоговых цифровых преобразователей к блоку нейронной сети, выход блока нейронной сети подключен к блоку связи, взаимодействующим с блоком отображения информации и блоком хранения информации. Блок нейронной сети обрабатывает измеренные значения входных параметров и выдает результат -значения показателей режимов работы и поврежденности элементов асинхронного электродвигателя.
Недостатком предлагаемого устройства является отсутствие анализа вибрации подшипниковых узлов и крутящего момента двигателя.
Известен способ диагностирования обобщенного технического состояния электродвигателя, описанный в патенте РФ на изобретение №2641318. Способ диагностирования технического состояния электрических машин, реализуемый на базе вычислительного комплекса, путем измерения вибрации, потребляемого тока, температуры, отличающийся тем, что измеренные значения преобразуются входными нелинейными функциями, масштабируются, суммируются с формированием обобщенного трехмерного вектора технического состояния, упомянутый вектор оценивается по заданным пороговым значениям с последующей визуализацией на дисплей.
Недостатком способа является отсутствие анализа крутящего момента двигателя, что снижает достоверность диагноза.
Известна система и способ для предсказания неисправностей в механизмах, приводимых в работу асинхронными машинами (патент США US 2003/0042861 А1), заключающийся в наблюдении за изменением крутящего момента, который вычисляется косвенно по величине фазных токов. Оценка отклонения вычисленной характеристики двигателя от известной говорит о неисправности в механической системе.
Недостатком способа является отсутствие контроля неисправностей по другим диагностическим признакам, а также отсутствие частотного анализа сигнала момента, по которому можно дифференцировать дефекты системы.
За прототип принят способ диагностирования неисправностей и осуществляющая его система, описанная в патенте Республики Корея (KR101432786B10). Данная система включает в себя:
- устройство для диагностирования роторной обмотки с помощью анализа тока и частоты вращения; процедуру вычисления вибрации ротора;
- процедуру диагностирования неисправностей подшипников, включающую блок, в котором косвенным образом вычисляется крутящий момент в воздушном зазоре двигателя, блок вычисления характеристических частот подшипников, блок частотного анализа момента, определяющий нарушение баланса распределения магнитного поля в воздушном зазоре, возникающего из-за эксцентриситета ротора, вызванного дефектами подшипника;
- процедуру определения КПД двигателя, в которой определяется разница между подводимой энергией и выходной мощностью двигателя, по которой судят о наличии неисправностей.
Недостатком устройства является определение крутящего момента косвенным способом, что может повлечь за собой снижение достоверности диагностирования при наличии дефектов в двигателе, кроме того, не диагностируются межвитковые замыкания в статорных обмотках. Еще одним недостатком описываемого устройства является отсутствие возможности определения остаточного ресурса двигателя в процессе эксплуатации.
Целью предлагаемого способа и устройства является повышение достоверности диагностирования и прогнозирования технического состояния асинхронных двигателей.
Поставленная цель достигается тем, что устройство оценки технического состояния асинхронного двигателя, содержит блок многомерной регрессии, позволяющий по совокупности диагностических признаков - амплитуд характеристических частот дефектов в спектре вибрации подшипниковых узлов, в спектре проводимости фазы статора, в спектре сигнала крутящего момента, температуры подшипниковых узлов, статора, ротора - производить оценку и прогнозирование технического состояния двигателя с помощью предлагаемого способа. Причем достоверность диагностирования повышается также за счет перекрестного анализа данных, полученного из различных источников. Например, анализ технического состояния подшипниковых узлов анализируется по данным, полученных из сигнала вибрации, спектра проводимости, сигнала момента и температуры узла. Таким образом снижается вероятность ложных диагнозов.
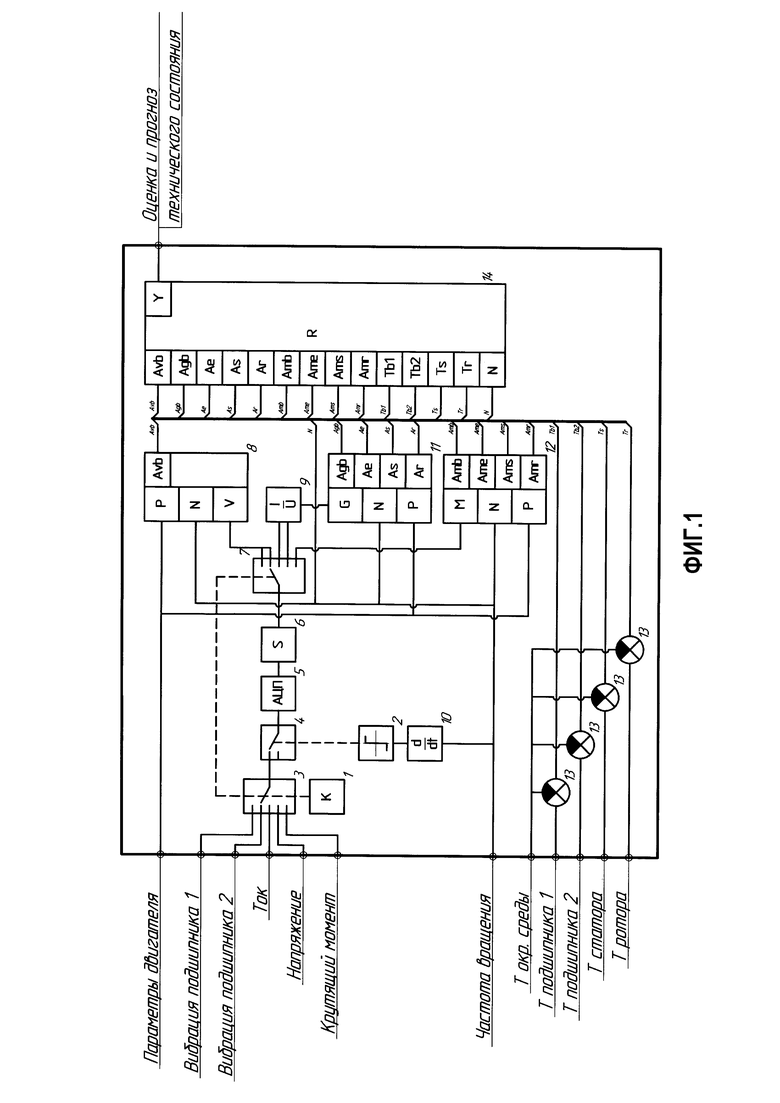
На фиг. 1 представлена структурная схема предлагаемого устройства.
Устройство имеет входы для сигналов:
1. «Параметры двигателя» - число пар полюсов, число пазов ротора, геометрические параметры подшипников и другие конструктивные параметры;
2. «Вибрация подшипника 1» - сигнал с датчика вибрации, установленного на подшипник со стороны выходного вала двигателя;
3. «Вибрация подшипника 2» - сигнал с датчика вибрации, установленного на подшипник с противоположной стороны выходного вала двигателя;
4. «Ток» - сигнал тока статора одной из фаз обмотки двигателя;
5. «Напряжение» - сигнал напряжения статора одной из фаз обмотки двигателя;
6. «Крутящий момент» - сигнал датчика момента, установленного на выходном валу двигателя;
7. «Обороты» - значение частоты вращения ротора асинхронного двигателя;
8. «Т окр. среды» - значение температуры окружающего воздуха;
9. «Т подшипника 1» - значение температуры подшипника со стороны выходного вала двигателя;
10. «Т подшипника 2» - значение температуры подшипника с противоположной стороны выходного вала двигателя;
11. «Т статора» - среднее значение температуры статорной обмотки;
12. «Т ротора» - среднее значение температуры роторной обмотки; Входной канал параметров двигателя подключен к входам Р
анализаторов спектра 8, 11, 12. Входной канал вибрации подшипника со стороны выходного вала подключен к первому входу переключателя каналов 3. Входной канал вибрации подшипника с противоположной стороны выходного вала подключен ко второму входу переключателя каналов 3. Входной канал сигнала тока по меньшей мере одной из фаз обмотки статора связан с третьим входом переключателя каналов 3. Входной канал сигнала напряжения по меньшей мере одной из фаз обмотки статора подключен к четвертому входу переключателя каналов 3. Входной канал сигнала крутящего момента двигателя подключен к пятому входу переключателя каналов 3.
Переключатель каналов 3 управляется коммутатором 1, а выход переключателя каналов соединен с выключателем 4, управляемым сигналом производной от частоты вращения двигателя, полученным с выхода дифференциатора 10 и порогового элемента 2, подключенного к входному каналу сигнала частоты вращения двигателя,
Выход аналого-цифрового преобразователя 5 связан с вычислителем спектра 6, соединенного с входом селектора каналов 7, синхронно переключающегося с переключателем каналов 3. Первый и второй выход селектора каналов 7 подключен к входу V анализатора спектра вибрации 8, третий и четвертый канал селектора 7 подключен к вычислителю спектра проводимости фазы двигателя 9, выход которого соединен со входом G анализатора спектра проводимости 11, а пятый выход селектора каналов 7 связан с входом М анализатора спектра крутящего момента выходного вала двигателя 12.
Полученные пики амплитуд, соответствующие характеристическим частотам: дефектов подшипника Avb, Agb, Amb; эксцентриситету ротора Ае, Ame; межвитковым замыканиям обмотки статора As, Ams; неисправностям роторной обмотки Ar, Amr поступают на блок 14, представляющий собой блок вычисления многомерной регрессии, также имеющий входы для значения температуры подшипника, установленного со стороны выходного вала Tb1, значения температуры подшипника, установленного с противоположной стороны выходного вала Tb2, температуры статора Ts, температуры ротора Tr, вычисляемые с помощью вычитателя 13, вход сигнала частоты вращения двигателя N.
Блок многомерной регрессии имеет выходной сигнал «Оценка и прогноз технического состояния», позволяющий непрерывно оценивать текущее техническое состояние двигателя и производить анализ возможного остаточного ресурса.
Устройство работает следующем образом.
Коммутатор 1 итеративно переключает сигналы вибрации подшипников, тока и напряжения статорной обмотки, крутящего момента. Производная частоты вращения двигателя, вычисленная блоком 10, проходит через пороговый элемент, что в итоге активирует переключатель при стабильных оборотах двигателя и переключатель 4 окажется подключенным к аналого-цифровому преобразователю 5. Оцифрованный сигнал поступит на блок вычисления спектра сигнала 6. Переключатели 3 и селектор 7 объединены связью, поэтому переключаются синхронно. Таким образом, соответствующий спектр сигнала поступит на блок 8, либо блок 9, либо блок 12.
В блоке 8 происходит анализ спектра сигнала вибрации, затем по известным из методов вибрационного диагностирования формулам находятся пики амплитуд, соответствующие дефектам подшипника.
Блок 9 вычисляет спектр проводимости фазы. Полученный спектр подается на вход G блока анализатора спектра проводимости 11 и по известным формулам находятся пики амплитуд, соответствующие дефектам подшипников, статора, ротора и наличию эксцентриситета ротора.
Спектр сигнала крутящего момента поступает на вход М блока анализатора спектра момента 12, где проводится анализ и вычисляются пики амплитуд, соответствующие дефектам подшипников, статора, ротора и наличию эксцентриситета ротора.
Дополнительными диагностическими признаками, указывающие на глубокий дефект, является температура узла, поэтому вычисляется относительная окружающей среде температура подшипников, статора, ротора с помощью вычитателя 13.
Значения амплитуд характеристических частот, величины частоты вращения двигателя и температуры подаются на входы блока многомерной регрессии 14, который оценивает текущее техническое состояние по экспертной шкале и просчитывает возможный остаточный ресурс двигателя.
Предлагаемый способ оценки технического состояния асинхронных двигателей заключается в следующем. Измеренные с помощью соответствующих датчиков сигналы вибрации подшипников, тока и напряжения статорной обмотки, а также крутящего момента, оцифровывают с помощью аналого-цифрового преобразователя. Затем с помощью быстрого преобразования Фурье получают спектры этих сигналов.
В спектре вибрации находят частотные компоненты fv, основанные на конструкции подшипника и соответствующие дефектам.
Для дефектов внутренней дорожки качения эти частоты можно рассчитать, как:

характеристические частоты дефектов внешней дорожки качения вычисляются согласно:
характеристические частоты дефекта сепаратора могут быть найдены по выражению:
для дефектов тел качения может применяться формула:
где fc - характеристическая частота дефекта сепаратора, Гц; fн - характеристическая частота перекатывания тел качения по наружному кольцу, Гц; fв - характеристическая частота перекатывания тел качения по внутреннему кольцу, Гц; fш - характеристическая частота перекатывания тел качения, Гц; fr - частота вращения ротора, Гц; z - число тел качения; dш диаметр тел качения, мм; D0 диаметр окружности по центрам тел качения, мм; β - контактный угол, рад.
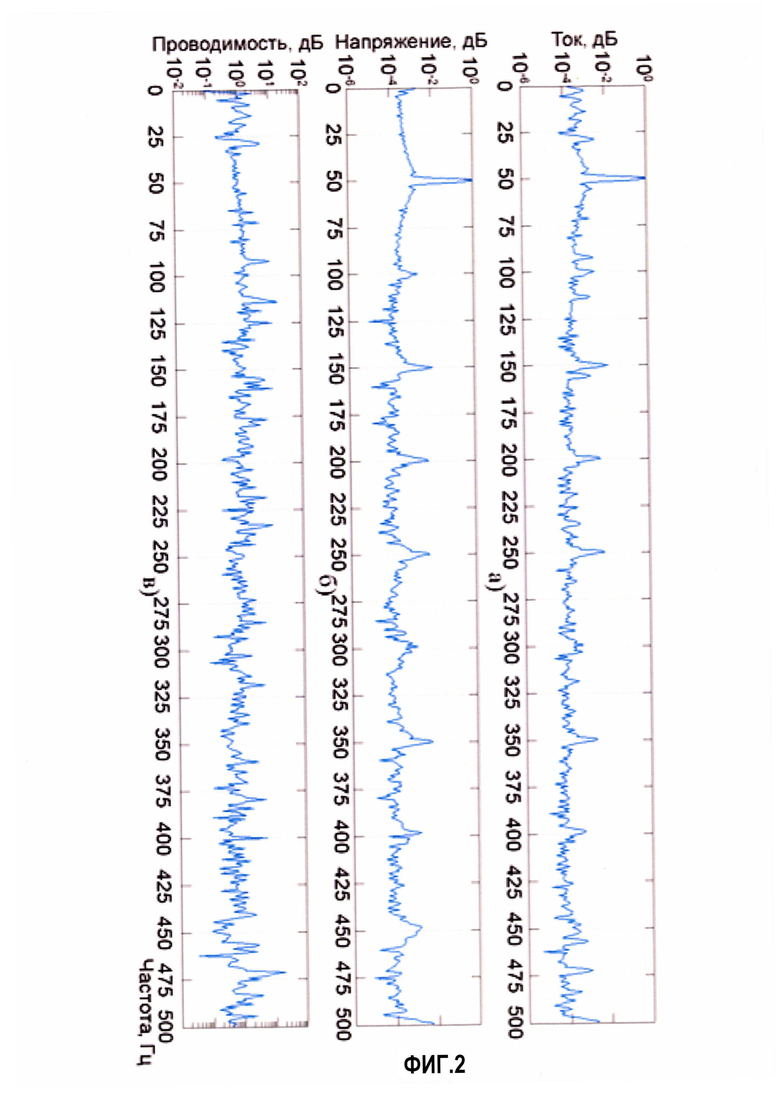
На основе найденных спектров для сигнала тока и сигнала напряжения вычисляют спектр проводимости фазы. Необходимость получения спектра проводимости фазы обоснована тем, что причиной гармоник, возникающих в спектре тока двигателя, но отсутствующих в спектре напряжения, являются физические процессы, происходящие в двигателе, в том числе вызванные его дефектами. Процесс получения спектра проводимости проиллюстрирован на фиг. 2. Для этого спектры тока (а) и напряжения (б) фазы нормализуются, а амплитуды тока делятся на соответствующие им по частоте амплитуды напряжения. Таким образом, уменьшаются по уровню амплитуды, вызванные внешними источниками воздействия (несинусоидальное питание, помехи от внешних устройств и т.д.).
В полученном спектре проводимости фазы (в) находят частотные компоненты, соответствующие дефектам асинхронного двигателя.
Дефект стержней ротора асинхронного двигателя приводит к возрастанию амплитуды последовательности боковых частот в спектре проводимости фазы:
где f1 - частота питающей сети, s - скольжение, k - порядок гармоники.
Частотные компоненты в спектре проводимости, указывающие на присутствие короткозамкнутых витков, могут быть найдены по формуле:
где p - число пар полюсов; s - скольжение ротора; k - порядок гармоники, целое 1,3,5…; f1 - частота питающей сети; n - целое 1,2,3…
Из-за эффекта эксцентриситета воздушного зазора появляются спектральные составляющие на частоте:
где - частотные компоненты в сигнале тока, Гц; nrt - целое 0,1,2,3,…; nd - порядок эксцентриситета, целое 0,1,2,3,…, при nd=0 статический эксцентриситет, при nd=1, 2, 3,… динамический; s - скольжение;р - число пар полюсов; Z2 - число зубцов ротора; - порядок гармоники магнитодвижущей силы статора, четное целое 1, 3, 5,…;
Дефекты подшипников приводят к появлению гармоник на частотах:
где k=1, 2, 3,…; fv - одна из характеристических частот, основанная на конструкции подшипника.
В полученном спектре крутящего момента аналогично находят частоты дефектов двигателя, которые описываются следующими формулами. При дефектах ротора будут возникать пульсации момента на частотах:
Частотные компоненты, вызванные дефектами межвитковых замыканий в статорной обмотке, проявляются в спектре момента на частотах:
Из-за наличия эксцентриситета в двигателе будут возникать пики спектральной характеристики на частотах:
Дефекты подшипников приводят к появлению гармоник на частотах:
Вычисляются дополнительные диагностические признаки, указывающие на глубокий дефект - измеренная относительно окружающей среде температура подшипников, статора и ротора.
Значения амплитуд характеристических частот, величины частоты вращения двигателя и температуры узлов анализируются с помощью многомерной линейной регрессии. Многомерная регрессия восстанавливает неизвестную зависимость наблюдаемой вещественной величины от набора вещественных признаков, таким образом можно оценить текущее техническое состояние по экспертной шкале и просчитать возможный остаточный ресурс двигателя. Решающая функция регрессии находится по результатам экспериментальных опытов для каждого конкретного типа двигателя, причем в эксплуатации, с течением времени и накоплением данных о режимах работы двигателя, функция блока многомерной регрессии изменяется, и за счет этого результаты оценки и прогнозирования можно улучшить.
Применение предлагаемого способа и устройства, реализующего его, позволит повысить достоверность диагностирования и оценки прогнозирования остаточного ресурса асинхронных двигателей в процессе эксплуатации, и экономически оправданно к применению в машинах большой мощности, в том числе на железнодорожном транспорте.
| название | год | авторы | номер документа |
|---|---|---|---|
| Метод оценки технического состояния корабельных дизелей в условиях эксплуатации | 2020 |
|
RU2774729C2 |
| СПОСОБ ДИАГНОСТИКИ ЭЛЕКТРИЧЕСКИХ ДВИГАТЕЛЕЙ С ФАЗНЫМ РОТОРОМ | 2008 |
|
RU2392632C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ ОБОБЩЁННОГО ТЕХНИЧЕСКОГО СОСТОЯНИЯ ЭЛЕКТРОДВИГАТЕЛЯ | 2016 |
|
RU2641318C1 |
| СПОСОБ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ЭЛЕКТРОПРИВОДНОЙ АРМАТУРЫ | 2011 |
|
RU2456629C1 |
| СПОСОБ ДИАГНОСТИКИ ЭЛЕКТРОДВИГАТЕЛЕЙ ПЕРЕМЕННОГО ТОКА И СВЯЗАННЫХ С НИМИ МЕХАНИЧЕСКИХ УСТРОЙСТВ | 2005 |
|
RU2300116C2 |
| Система мониторинга и диагностирования состояния турбогенератора | 2023 |
|
RU2814856C1 |
| Способ мониторинга вибрации щеточно-коллекторных узлов электродвигателей постоянного тока | 2019 |
|
RU2730109C1 |
| СПОСОБ ДИАГНОСТИКИ ЭЛЕКТРОДВИГАТЕЛЯ ПЕРЕМЕННОГО ТОКА И СВЯЗАННЫХ С НИМ МЕХАНИЧЕСКИХ УСТРОЙСТВ | 2007 |
|
RU2339049C1 |
| Система мониторинга и диагностирования состояния турбогенератора | 2023 |
|
RU2814857C1 |
| СПОСОБ ДИАГНОСТИКИ МЕХАНИЗМОВ И СИСТЕМ С ЭЛЕКТРИЧЕСКИМ ПРИВОДОМ | 2009 |
|
RU2431152C2 |
Изобретение относится к области метрологии. Устройство содержит в своем составе вход параметров двигателя, два входа сигналов вибрации подшипников двигателя, входы сигнала тока и напряжения фазы статора асинхронного двигателя, вход сигнала крутящего момента двигателя, вход датчика частоты вращения двигателя, датчик температуры окружающей среды и четыре датчика температуры, соответствующие температурам подшипников, статора и ротора. Канал вычисления спектра состоит из селектора, аналого-цифрового преобразователя и вычислителя спектра. Вычисленные спектры поступают на соответствующий каждому сигналу спектроанализатор, где находятся соответствующие дефектам асинхронного двигателя амплитуды характеристических частот. Данная информация, а также информация от датчиков температуры поступают на вход многомерной регрессии, с помощью которой определяется текущее техническое состояние двигателя и может быть осуществлен прогноз остаточного ресурса. Многомерная регрессия восстанавливает неизвестную зависимость наблюдаемой вещественной величины от набора вещественных признаков, таким образом можно оценить текущее техническое состояние по экспертной шкале и просчитать возможный остаточный ресурс двигателя. Технический результат - повышение достоверности диагностирования и прогнозирования технического состояния асинхронных двигателей. 2 н. и 2 з.п. ф-лы, 2 ил.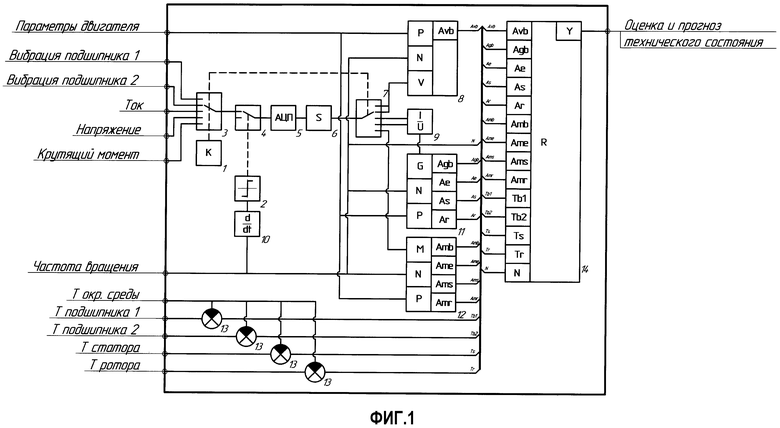
1. Устройство оценки технического состояния асинхронных двигателей, имеющее входной канал параметров двигателя, подключенный к входам анализаторов спектра, входной канал вибрации подшипника со стороны выходного вала, подключенный к первому входу переключателя каналов, входной канал вибрации подшипника с противоположной стороны выходного вала, подключенный ко второму входу переключателя каналов, входной канал сигнала тока по меньшей мере одной из фаз обмотки статора, связанный с третьим входом переключателя каналов, входной канал сигнала напряжения по меньшей мере одной из фаз обмотки статора, подключенный к четвертому входу переключателя каналов, входной канал сигнала крутящего момента двигателя, подключенный к пятому входу переключателя каналов, причем переключатель каналов управляется коммутатором, а выход переключателя каналов соединен с выключателем, управляемым сигналом производной от частоты вращения двигателя, полученным с выхода дифференциатора, подключенного к входному каналу сигнала частоты вращения двигателя, при этом производная частоты вращения двигателя проходит через пороговый элемент, что в итоге активирует переключатель при стабильных оборотах двигателя и передает один из выбранных каналов на аналого-цифровой преобразователь, выход которого связан с вычислителем спектра, соединенным с входом селектора каналов, синхронно переключающегося с переключателем каналов, причем первый и второй выход селектора каналов подключен к анализатору спектра вибрации, передающего на выход амплитуду характеристических гармоник в спектре вибрации, соответствующих дефекту двигателя, третий и четвертый канал селектора подключен к вычислителю спектра проводимости фазы двигателя, выход которого соединен со входом анализатора спектра проводимости, передающего на выход амплитуду характеристических гармоник в спектре проводимости фазы, соответствующих дефекту двигателя, а пятый выход селектора каналов связан с анализатором спектра крутящего момента выходного вала двигателя, передающего на выход амплитуду характеристических гармоник в спектре крутящего момента, соответствующих дефекту двигателя, причем входы анализатора спектра вибрации, анализатора спектра проводимости и анализатора спектра крутящего момента подключены к входному каналу сигнала частоты вращения, а выходы – к блоку многомерной регрессии, который также соединен с входным каналом частоты вращения двигателя и выходом четырех вычитателей, осуществляющих вычисление относительной окружающей среде температуры подшипника со стороны выходного вала двигателя, со стороны, противоположной выходному валу двигателя, средней температуры статора, средней температуры ротора, при этом блок многомерной регрессии на основании входных данных через выходной канал устройства передает текущее техническое состояние объекта диагностирования и оценку остаточного ресурса двигателя.
2. Способ оценки технического состояния асинхронных двигателей, включающий измерение тока и напряжения по меньшей мере одной из фаз обмотки статора, измерение частоты вращения ротора, измерение крутящего момента двигателя, определение относительной окружающей среде температуры подшипниковых узлов, температуры ротора и статора, аналого-цифровое преобразование данных сигналов, построение спектральных характеристик этих сигналов с помощью преобразования Фурье, анализ спектра вибрации подшипников, отличающийся тем, что дополнительно вычисляется спектр проводимости по меньшей мере одной из фаз статора, и анализируются спектральные компоненты, порождаемые дефектом двигателя, вместе с тем анализируется спектр крутящего момента и вычисляются характеристические частоты дефектов двигателя в этом спектре, затем результат анализа спектра вибрации, проводимости, крутящего момента, вместе со значением частоты вращения ротора и относительной окружающей среде температуры подшипниковых узлов, температуры ротора и статора обрабатывается с помощью многомерной линейной регрессии, дающей оценку текущего технического состояния по экспертной шкале и возможный остаточный ресурс двигателя.
3. Способ по п. 2, отличающийся тем, что решающая функция блока многомерной регрессии изменяется в процессе эксплуатации объекта диагностирования и поступления диагностических данных с целью повышения достоверности диагноза и прогноза остаточного ресурса.
4. Способ по п. 2, отличающийся тем, что для вычисления проводимости фазы статора асинхронного двигателя записывают сигналы тока и напряжения данной фазы, производят аналого-цифровое преобразование данных сигналов, строят спектральную характеристику сигналов тока и напряжения с помощью преобразования Фурье, спектры тока и напряжения фазы нормализуются, а амплитуды тока делятся на соответствующие им по частоте амплитуды напряжения.
| KR 101432786 B1, 23.09.2014 | |||
| СПОСОБ ПОЛУЧЕНИЯ ГИДРОЛИЗАТОВ СВИНОГО МЯСА | 0 |
|
SU166464A1 |
| EP 3293501 A1, 14.03.2018 | |||
| ПЛОДОВО-ЯГОДНЫЙ ПИЩЕВОЙ ПРОДУКТ С ПРОТИВОМИКРОБНЫМ ДЕЙСТВИЕМ ПРОТИВ HELICOBACTER PYLORI | 2010 |
|
RU2523009C2 |
| Способ сварки и наплавки бронзы | 1961 |
|
SU147268A1 |
| US 6774601 B2, 10.08.2004 | |||
| Устройство для оштукатуривания стен | 1956 |
|
SU111684A1 |
| Способ централизованного распределения мелкозернистых материалов (например, глинозема) по последовательно подключенным к магистрали пневмотранспорта приемным емкостям | 1961 |
|
SU146950A1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ ОБОБЩЁННОГО ТЕХНИЧЕСКОГО СОСТОЯНИЯ ЭЛЕКТРОДВИГАТЕЛЯ | 2016 |
|
RU2641318C1 |
| СПОСОБ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ И ОЦЕНКИ ОСТАТОЧНОГО РЕСУРСА ЭЛЕКТРОМЕХАНИЧЕСКОГО АГРЕГАТА С АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2016 |
|
RU2626231C1 |
| Скляр А | |||
| В | |||
| Совершенствование методики и устройства определения частоты вращения | |||

