(54) СПОСОБ ФОРМИРОВАНИЯ-УПРАВЛЯЩЕГО
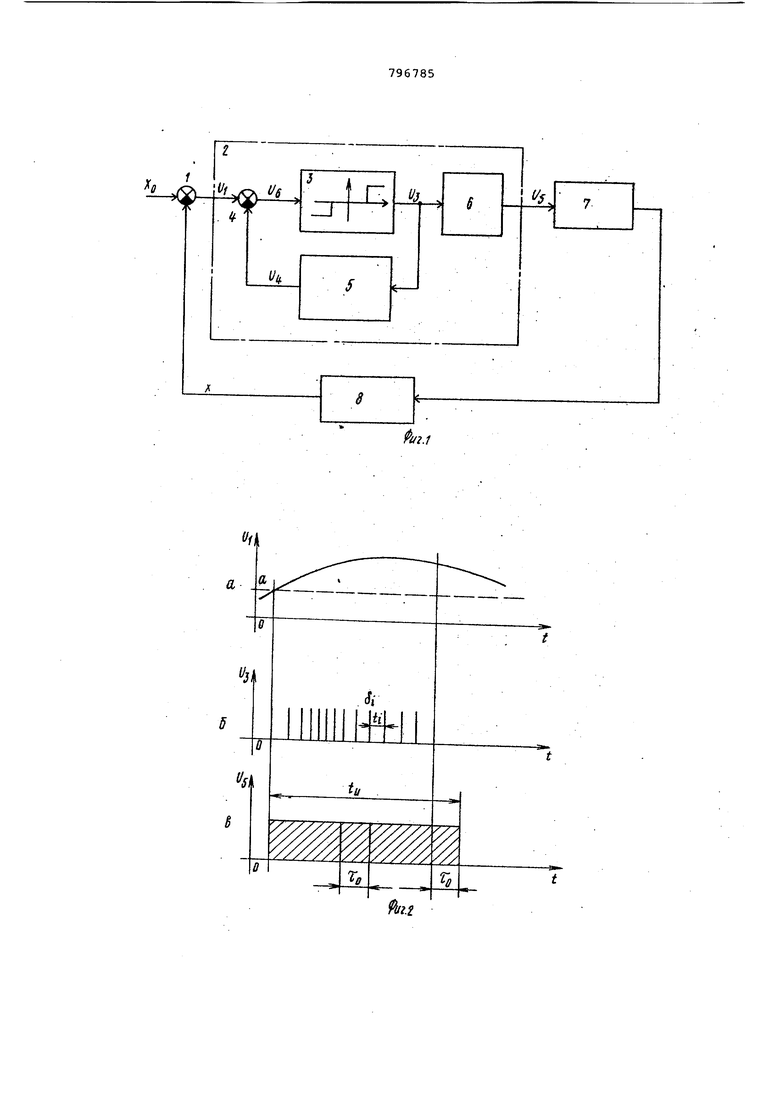
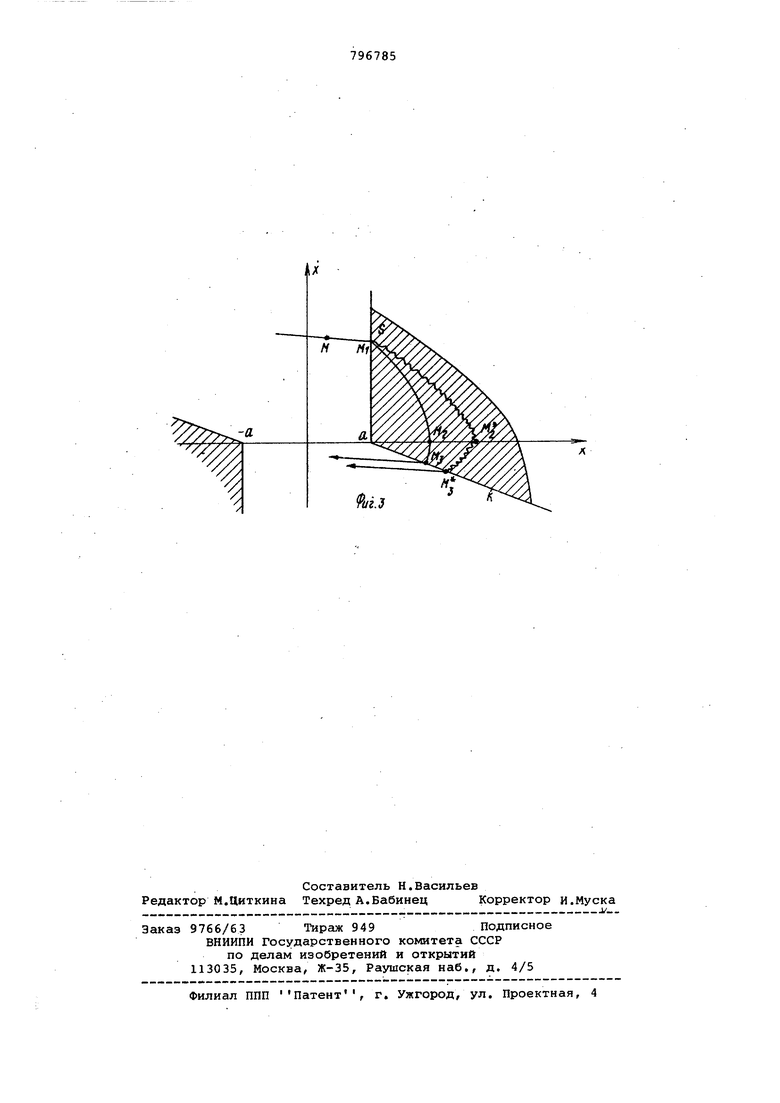
СИГНАЛА В РЕЛЕЙНО-ИМПУЛЬСНЫХ СИСТЕМАХ УПРАВЛЕНИЯ жеиие изображающей точки на фазовой траектории; а, -а - границы зоны нечувствительности системы; S - област существования скользящего режима, Суть способа состоит в следующем При достижении увеличивающимся сигналом ошибки управления границы зоны нечувствительности в системе фо мируется передний фронт релейного не рерывного управляющего сигнала, и начинается управление в скользящем режиме. При этом, начиная с момента образования импульсного сигнала,созданного вследствие управления в скол зящем режиме, формируют непрерывный сигнал. Непрерывный сигнал заканчивается в момент времени, при котором временной интервал между соседними импульсными сигналами превышает некоторую заданную величину т. Пример реализации способа в системе управления при входном сигнале Хо О представлен ниже.; Пусть в некоторый момент времени сигнал и, поступающий от линейного датчика - измерителя 1 сигнала ошибки управления, по величине меньше уровня срабатывания t РЭ 3 и имеет тенденцию к увеличению (сигнал U на фиг. 2а). Указанной величине соответствует положение точки М на фазовой плоскости (фиг. 3). в описанной ситуации релейно-импульсный регулятор 2 находится в исходном состоянии: РЭ 3 выключен, выходной сигнал инерционного звена 5 равен ну лю (н качестве инерционного эвена рассматривается апериодическое звено) 4 При увеличении сигнала х (а, следовательно, и и ). при U а срабатывает РЭ 3, и на входы формирователя управляющего сигнала и инерцион ного з-вена 5 начинает поступать сигнал От, (выходной сигнал РЭ) „ Выходным сигналом звена 5, который имеет нарастающий характер при включении РЭ 3, ПРОИЗВОЛ4ИТСЯ компенсация сигна ла U-f, и если темп изменения последнего йеньше скорости нарастания сигнала U4 то РЭ 3 выключается через время, определяемое только его запаздыванием (временным или пространс венным гистерезисом). в идеальном случае РЭ переключается мгновенное В течение времени включения РЭ на ег выходе формируется одиночный импульс (фиг. 26) бесконечно малой длител ности. Импульс cf-j преобразуется формирователем 6 управляющего сигнала в импульс фиксированной длительности , (фиг. 2в) . Выходной сигнал РЭ 3 в области скользящего режима S представляетсо бой последовательность импульсов сГ, частота которых определяется параметрами сигнала х и его п роизводной х и параметрами апериодического звена 5. Если после включения РЭ 3 время t между двумя соседними импульсами (Я{ меньше Го, то выходной сигнал формирователя 6 управляющего сигнала (Uf) является непрерывным. В соответствии с приведенной выше логикой функционирования регулятора 2 изображающая точка при управлении объектом второго порядка (представляемым двумя инерционными звеньями) может иметь участки фазовой траектории типа участка М - М2- Мз/ на котором в точке М производится включение исполнительных органов 7, а в точке М3 их.отключение (фиг. 3). Любая другая фазовая траектория с прерыванием управляющего сигнала за счет создания скользящего режима при управлении имеет большую протяженность по координате х, т,е.) и по координате х, т.е .. Так как время действия управления, необходимое для перемещения изображающей точки из положения М-( на ли- нию выключения К зависит от положения точки М на ней, то время действия управления с прерыванием управляющего сигнала всегда больше времени релейного непрерывного управления. Формула изобретения Способ формирования управляющего сигнала в релейно-импульсных системах управления, заключающийся в том, что в зависимости от ошибки управления формируют импульсный управляющий сигнал путем создания скользящего режима, отличающийся тем, что,с целью уменьшения времени управления при одновременном уменьшении перерегулирования, начиная с момента возникновения импульсного сигнала, формируют непрерывный управляющий сигнал, причем формирование непрерывного сигнала прекращают в момент превышения временным интервалом между импульсными сигналами некоторой, наперед заданной и определенной требуемыми характеристиками переходного процесса, величины, , Источники информации, принятые во внимание при экспертизе 1, Уткин В,И. Скользящие режимы и их применения в системах с переменной структурой. М., Наука, 1974, с. 13.
а .
| название | год | авторы | номер документа |
|---|---|---|---|
| Релейно-импульсный регулятор | 1988 |
|
SU1640667A1 |
| Релейный регулятор | 1989 |
|
SU1695263A1 |
| Релейно-импульсный регулятор | 1983 |
|
SU1137442A1 |
| Релейно-импульсный регулятор | 1988 |
|
SU1644086A1 |
| Нелинейный преобразователь для систем с переменной структурой | 1982 |
|
SU1043593A1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2396586C1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2385480C1 |
| Способ управления | 1975 |
|
SU805247A1 |
| Релейно-импульсный регулятор для объекта второго порядка | 1980 |
|
SU943640A1 |
| Релейный регулятор | 1990 |
|
SU1836658A3 |
J
