(54) РЕЛЕЙНО-ИМПУЛЬСНЫЙ РЕГУЛЯТОР ДЛЯ ОБЪЕКТА ВТОРОГО ПОРЯДКА
| название | год | авторы | номер документа |
|---|---|---|---|
| Релейно-импульсный регулятор | 1983 |
|
SU1137442A1 |
| Способ формирования управляющегоСигНАлА B РЕлЕйНО-иМпульСНыХСиСТЕМАХ упРАВлЕНия | 1976 |
|
SU796785A1 |
| Релейно-импульсный регулятор | 1988 |
|
SU1640667A1 |
| Релейный регулятор | 1989 |
|
SU1695263A1 |
| Релейно-импульсный регулятор | 1984 |
|
SU1280567A1 |
| Релейно-импульсный регулятор | 1988 |
|
SU1608616A1 |
| Релейное управляющее устройство | 1972 |
|
SU443363A1 |
| Частотно-импульсный регулятор | 1985 |
|
SU1287100A1 |
| Релейно-импульсный регулятор | 1988 |
|
SU1644086A1 |
| Система управления с координатно-параметрической обратной связью | 1983 |
|
SU1126927A1 |

1
Изобретение относзггся к релейным системам автоматического управления и может быть использовано для стабилизапии объектов второго порядка.
Известен репейно-импульсный рюгу- лятор, содержаний последовательно соединенные первый элемент сравнения и трехпозшшонный релейный элемент, выход которого соединен с входом исполнитепьнотчэ механизма и через элемент гибкой обратной связи с вторым входом репейного элемента и первым входом элемента сравнения, второй вход KOTqporo соединен с выходом первого элемента сравнения, а его выход непосредственно и через блок задержки с первым и вторым входами блока логического умножения, выход которого через фильтр соединен с вторым входом элемента гибкой обратной связи С1 3
Недостатком этого регулятора является возможность по$шления повторного однопопжфного импульса ухфавления.
обусловленная невысокой помехоустойчивостью регулятора. Наиболее близким к предлагаемому является релейно-импульсный регутгктр дпя объекта второго порядка, содержащий последовательно соединенные первый сумматор, апериодическое звено, второй сумматор, на второй вход которого подается сигнал сшшбки управленяя, трехпозищюнный релейный элемент с
to гестерезисом, выход которого соедянев с первым входом первого сумматора и входом формирователя выходных сигналов управления исполшггельным органом 2j .
15
Недостатком известного устройства является плохое качество процесса управления объектом второго порядка иэ-за невысокой помехоустойчивости регулято20ра.
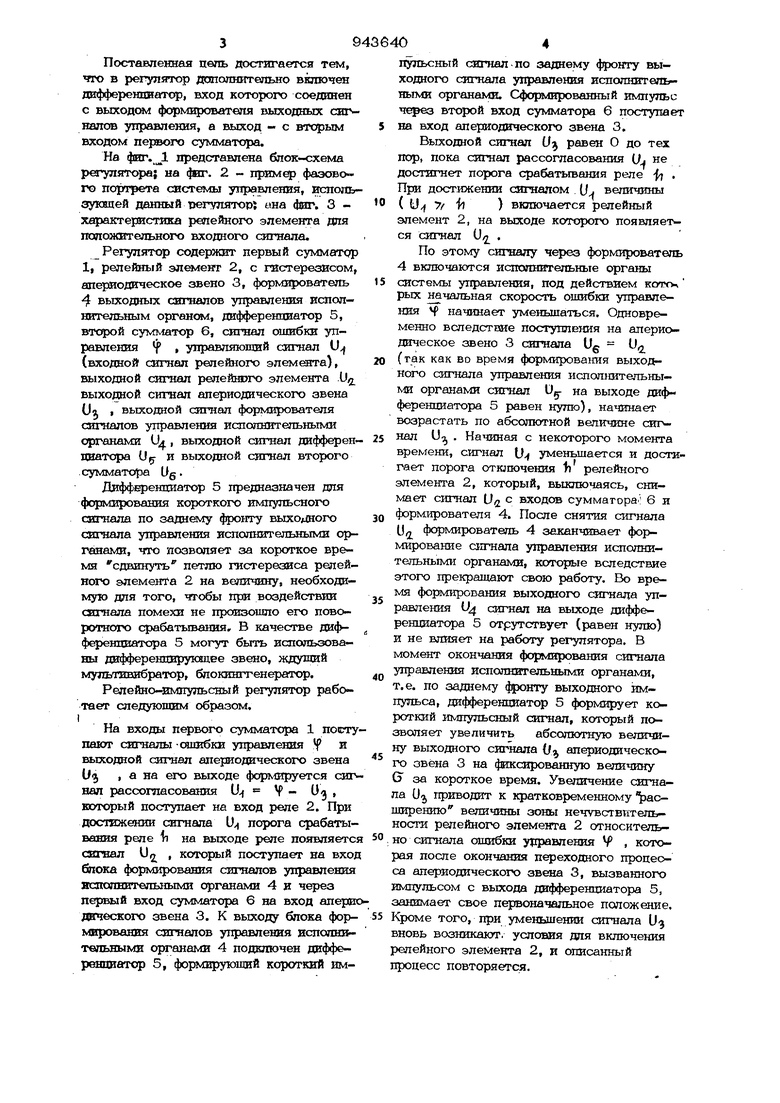
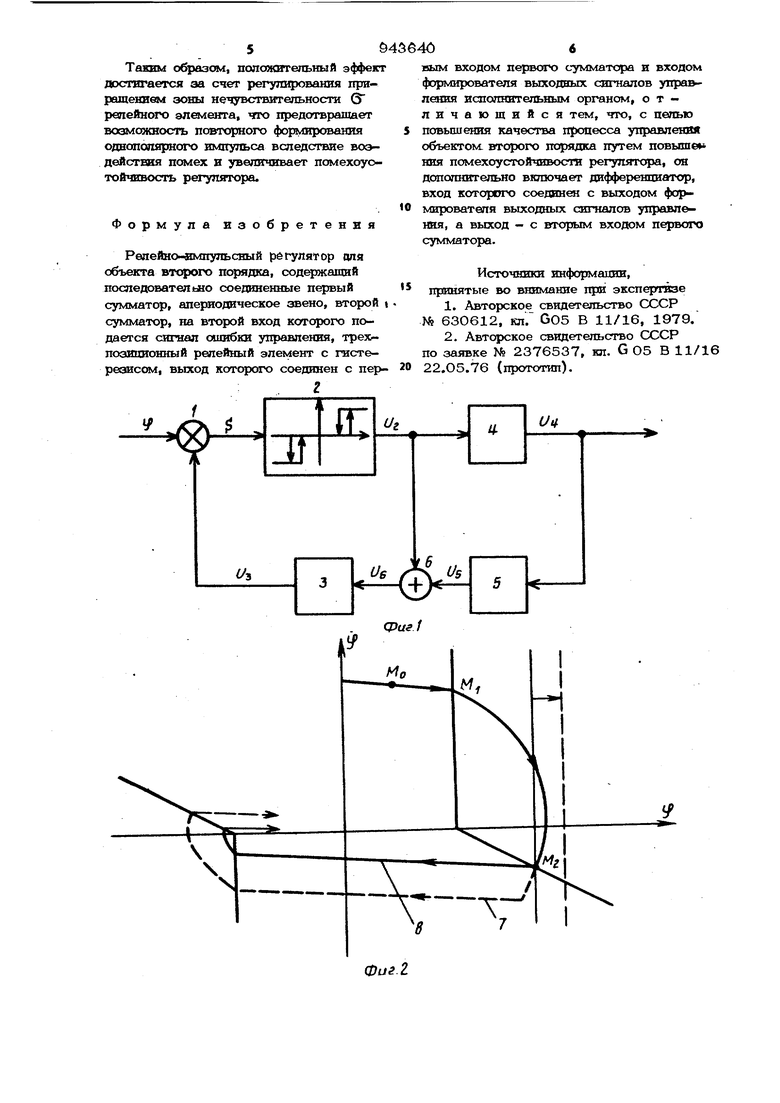
Цель изобретения - повышение качест. ва процесса управления объектом второго порядка путем повышения помехоустойчивости регу71ятор а. Поставленная цепь достигается тем, ИГО в регул5ггор jjonojiioiTenbHO включен дифференциатор, вход которого соединен с выходсж формирователя выходньос сигналов управления, а выход - с вторым входом перзэого сумматора. На фнг. JI представлена блок-схема регулятора; на (}яг. 2 - пример фазового портрета системы управления, исполь зующей данный регулятор; ана фиг. 3 характеристика репейного элемента для положительного входного сигнала. Регулятор содержит первый сумматор 1, релейный эл&легег 2, с гистерезисом апериодическое звено 3, формирователь 4 выходных сигналов управления исполнительным органом, дифференциатор 5, втсфой сумматор 6, сигнал ошибки управления f , управляющий сигнал U (входной сигнал релейного элемента), выходной сигнал релейного элемента .0 выходной сигнал апериодического звена Ua , выходной сигнал формирователя сзггналов управления исполнительными органами U, выходной сигнал дифферен цнатора и и выходной сигнал второго сумматора Од Дифференциатор 5 предназначен для формирования короткого импульсного сзгсгнала по заднему фронту выхол(ного сигнала управления исполнительными органами, что позволяет за короткое время сдвинуть петлю гистерезиса релейного элемента 2 на величину, необходимую для того, чтобы при воздействии сигнала помехи не прсшзошло его поворотного срабатьгоания, В качестве дифференди гора 5 могут быть использованы дифферешшрукяцее звено, ждущий мультивибратор, блокинггенератор. Релейнонгсмпульсный регулятор работает следующим образом. I На входы первого сумматора 1 поЕту пают сигналы -саиибки управления С и выходной сигнал апериодического звена и , а на его выходе формируется сиг нал рассогласования U-f Ч - 0 , который поступает на вход реле 2. При досшжеянии сигнала U порога срабатывания реле на выходе реле по51БЛяетс скгвал и 2 , который поступает на вхо блока формирования сигналов управления исполнительными органами 4 и через первый вход сумматора 6 на вход апери даческого звена 3. К выходу блока фор мирования сигналов управления исполнительными органами 4 подключен дифферешшатор 5, формирующий короткий им904 цульсный сигнал по заднему фронту выходного сигнала управления испопнител ными органами. Сформированный импульс через второй вход сумматора 6 поступает на вход апериодического звена 3. Выходной сигнал U равен О до тех пор, пока сигнал рассогласования (Jj не достигнет порога срабатьгоания реле fj . При достижении сигналом {J. величины ( и 7/ И ) включается релейный элемент 2, на выходе которого появляется сигнал и,2. По этому сигналу через формирователь 4 включаются исполнительные органы системы управления, под действием котчх рых начальная скорость ошибки управления М начинает уменьшаться. Одновременно вследствие поступления на алериодическое звено 3 сигнала Ug U,, (гак как во время формирования выходного сигнала управления нспояюггельны- ми органами сигнал U на выходе дифференциатора 5 равен нутпо), начинает возрастать по абсолютной величине сигнал и . Начиная с некоторого момента времени, сигнал U-f уменьшается и достигает порога отюпочения ti релейного элемента 2, который, выключаясь, снимает сигнал U/j с входов сумматора; 6 и формирователя 4. После снятия сигнала и формирователь 4 заканчивает формирование CKTueaia управления исполнительными органами, которые вследствие этого прекращают свою работу. Во время формирования выходного сигнала управления 4 сигаал на выходе дифференциатора 5 отрутствует (равен нулю) и не влияет на работу регулятора. В момент окончания фqpмиpoвaния сигнала управления испопнЕГгельными органами, т.е. по заднему (JpoHTy выходного импульса, дифференциатор 5 формирует короткий импульсный сигаал, который позволяет увеличить абсолютную величину выходного сигнала 0% апериодического звена 3 на фиксированную величину G за короткое время. Увеличение сигнала и, приводит к кратковременному расширению величины зоны нечувствительности репейного элемента 2 относительно сигнала слиибки управления V , которая после окончшшя переходного процесса апериодического звена 3, вызванного импульсом с выхода дифференциатора 5, занимает свое первоначальное положение. Кроме того, при уменьшении сигнала U вновь возникают, условия для включения релейного элемента 2, и описанный процесс повторяется.
Таккм образстм, попожшепьный эффект достигается эа счет регушфования при- решением зоны нечувствительности (5 репейного элемента, что предотвращает возможность повторного формирования однополярного вмпуттьса вследствие воэдействкя помех н увеличивает помехоустойчивость регулятора.
Формула изобретения
Реаейно-ямпульсвый регулятор оля объекта второго порядка, содержапшй последовательно соединенные первый сумматор, апериодическое звено, второй сумматор, на второй вход которого подается сигнал ошибки управления, трехпоэиционный релейный элемент с гистерезисом, выход которого соединен с перг
вым входом первого сумматора и входом формирователя выходных сигналов управления исполнительным органом, отличающийся тем, что, с целью повышения качества процесса управления объектом второго порядка путем повыше ния помехоустойчивости регулятора, он дополнительно включает дифференциатор, вход которого соединен с выходом формирователя выходных сигналов управления, а выход - с вторым входом первого сумматора.
Источники информации, принятые во внимание при экспертизе
по заявке № 2376537, кл. G 05 В 11/16 22.О5.76 (прототип).
()
, .
s
«-
S
r
фигЗ
