Изобретение относится к техническим средствам систем автоматического регулирования и может быть использо- вано для регулирования и управления различными динамическими объектами и технологическими процессами.
Целью изобретения является расширение области применения за счет увеличения диапазона входных сигналов регулятора и повышение динамической точности регулирования.
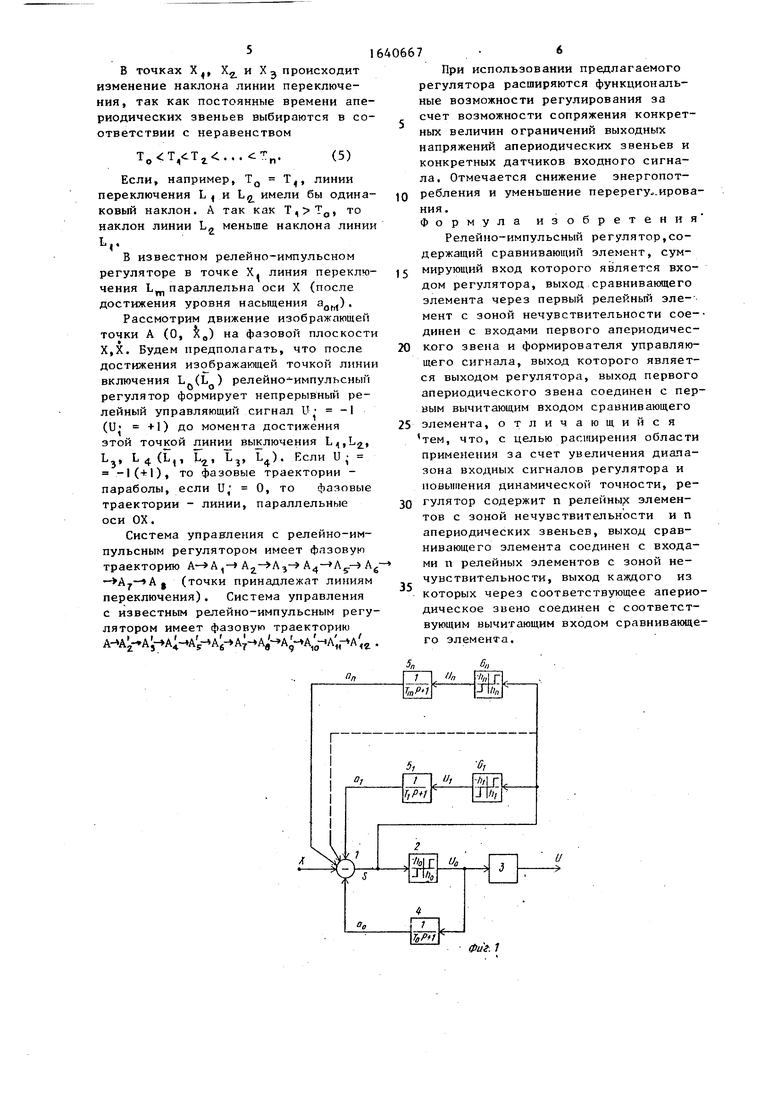
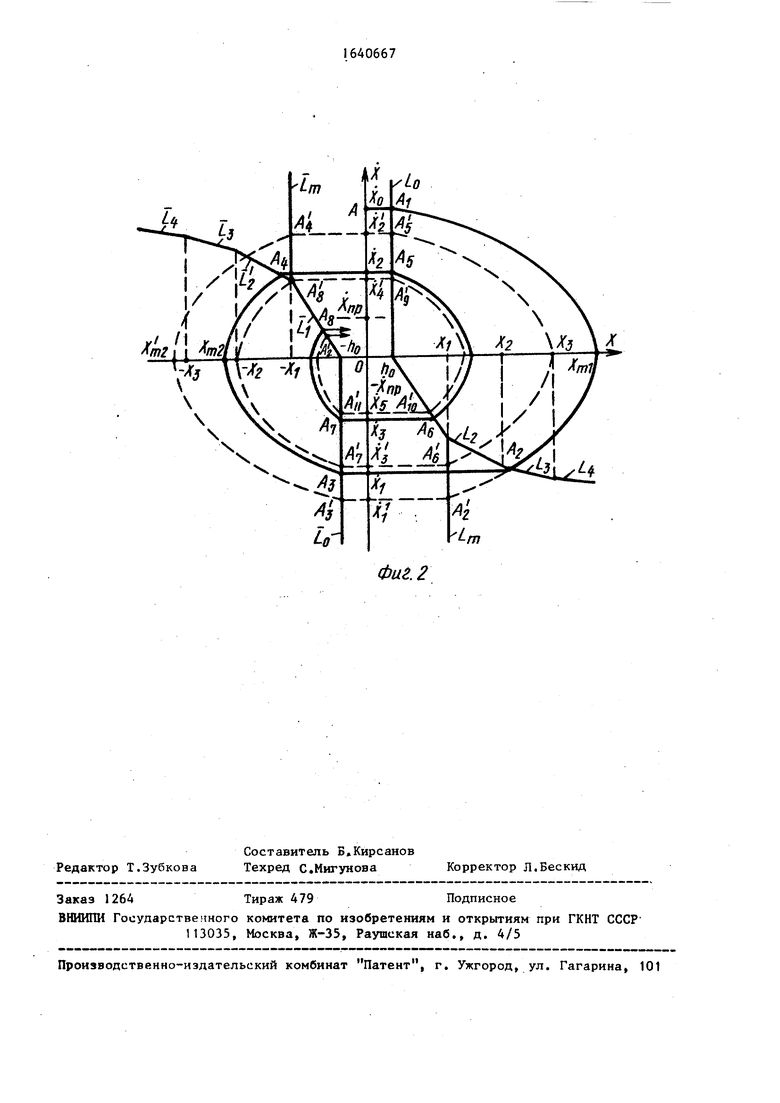
На фиг.1 приведена структурная схема релейно-импульсного регулятора; на фиг.2 - фазовые траектории системы управления с релейно-импульсным ( регулятором.
Релейно-импульсный регулятор содержит сравнивающий элемент 1,первый 2 релейный элемент с зоной нечувствит тельности, формирователь 3 управляющего сигнала,, первое 4 апериодическое звено, второе 5{...(п+1)-е 5п апериодические звенья и второй 6... . ,.(п+1)-й 6П релейные элементы с зоной нечувствительности.
На фиг.1 и 2 введены следующие обозначения:
а0...ап выходные сигналы соответственно первого 4...(п+1)-го 5п апериодических звеньев; Ua.t.Un - выходные сигналы соотСЈ
О
б
0
J
ветственно первого 2...(п+1)-го 6Я релейных элементов с зоной нечувствительности;
. ..h -зоны нечувствительности соответственно первого 2...(п+1)-го 6 релейного элемента с зоной
нечувствительности; 10...Тп - постоянные времени соответственно первого 4...(n+t)-ro 5n апериодических звеньев; о«
10
15
...,1,4,1,- участки прямых, ограничивающих линию переключения в правой полуплоскости фазовой плоскости;
А
А„,...,Ао - точки пересечения фазовой траектории с линиями переключения в системе с релейно-импульсным регулятором;25
А ,А,,
А-,...,А,г - точки пересечения фазовой траектории с линиями переключения в системе-прототипе .
Гормирователь 3 управляющего сигала представляет собой запаздывающее вено с запаздыванием Ј,, на выключеие.
30
Релейно-импульсный регулятор работает следующим образом.
Пусть входной сигнал X увеличивается от нуля. При достижении сигналом X значения Ь0 срабатывает первый 2 релейный элемент с зоной нечувст40
вительности, выходной сигнал которого поступает на вход первого 4 апериодического звена и формирователь 3 управляющего сигнала. В замкнутом контуре возникает, скользящий режим. ., Этот режим характеризуется тем,что выходной сигнал сравнивающего элемента 1 S X - а„ he const. Выходной сигнал U0 представляет собой последовательность импульсов,частота
Рассмотрим процесс управления фазовой плоскости X, X на примере равления консервативным объектом рого порядка. Линии переключения с использованием релейно-импульсного регулятора L0- Ц- ,.B np вой полуплоскости и L0- L , L в левой полуплоскости. Линии перек чения с использованием известного релейно-импульсного регулятора L0- правой полуплоскости и Lm в левой полуплоскост
следования которых Јцв пропорциейаль-Линии переключения L,, La, L3, L
на величине TQX + X - h0, где X - скорость изменения входного сигнала. Если частота следования импульсов fUo такова, что Тц0 l/ЈU(, то формирователь 3,управляющего сигнала формирует непрерывный выходной сигнал. 1аким образом в скользящем режиме
можно найти из (2) в предположении что (условие выключения фор мирователя управляющего сигнала).Т ки Х, Х. иХэ точки достижени соответственно сигналами U0...Un+ уровня насыщения (Х4 а, + Ь0,
ьв.
а
ОГЛ
+ а
+ altn + h2).
п
+ h,, X,
aom+ ai
0
0
5
0
5
0
,
S X - а
си„
О по
(Т X + X - h),
const,
(1)
(2)
VQ О
Пусть первое 4 апериодическое звено имеет уровень насыщения аот. При X аот + Ь0 и при (входной сигнал продолжает возрастать) первый 2 релейный элемент с зоной нечувствительности остается во включенном состоянии, а сигнал S начинает увеличиваться и при S hj произойдет включение второго 6( релейного элемента. Считаем, что ,A - малая величина (). Если входной сигнал X продолжает возрастать, то и в новом контуре возникает скользящий режим, для которого
S X - aom - а, h, const.
(3)
Пусть второе 5 апериодическое звено имеет уровень насыщения . Если входной сигнал продолжает возрастать, то при X аот + + h, остается включенным второй 64 релейный элемент с зоной нечувствительности, сигнал S увеличивается до значения Ii2.(n2. ni А ) после чего также возникает скользящий режим, для которого
а2 h г const.(4)
При дальнейшем увеличении входного сигнала поочередно возникает скользящий режим при S h(h 3 - hz Д ) и т.д.
Рассмотрим процесс управления на фазовой плоскости X, X на примере управления консервативным объектом второго порядка. Линии переключения с использованием релейно-импульсного регулятора L0- Ц- ,.B npa- вой полуплоскости и L0- L , L,. в левой полуплоскости. Линии переключения с использованием известного релейно-импульсного регулятора L0- правой полуплоскости и Lm в левой полуплоскости.
Линии переключения L,, La, L3, L
можно найти из (2) в предположении, что (условие выключения формирователя управляющего сигнала).Точки Х, Х. иХэ точки достижения соответственно сигналами U0...Un+i уровня насыщения (Х4 а, + Ь0,
ьв.
а
ОГЛ
+ а
+ altn + h2).
п
+ h,, X,
aom+ aim +
В точках Х, Xz и X э происходит изменение наклона линии переключения, так как постоянные времени апериодических звеньев выбираются в соответствии с неравенством
....
(5)
Если, например, TQ линии переключения L , и L имели бы одинаковый наклон. А так как Т,Т0, то наклон линии Ьг меньше наклона линии L,.
В известном релейно-импульсном регуляторе в точке X, линия переключения L№ параллельна оси X (после достижения уровня насыщения аом).
Рассмотрим движение изображающей точки А (О, Х0) на фазовой плоскости Х,Х. Будем предполагать, что после достижения изображающей точкой линии включения L (L ) релейно-импульснып регулятор формирует непрерывный релейный управляющий сигнал U- -1 (U- +1) до момента достижения этой точкой линии выключения L1tL2, L3, L 4 (L,, Lz, Ц, L4). Если U -l(+l), то фазовые траектории - параболы, если U, 0, то фазовые траектории - линии, параллельные оси ОХ.
Система управления с релейно-им- пульсным регулятором имеет фазовую траекторию ,
. А4
(точки принадлежат линиям переключения). Система управления с известным релейно-импульсным регулятором имеет фазовую траекторию
АХ-А А ХХХХХХХ
При использовании предлагаемого регулятора расширяются функциональные возможности регулирования за счет возможности сопряжения конкретных величин ограничений выходных напряжений апериодических звеньев и конкретных датчиков входного сигнала. Отмечается снижение энергопот- ребления и уменьшение перерегу„.ирования.
Формула изобретения
Релейно-импульсный регулятор,содержащий сравнивающий элемент, сум5 пирующий вход которого является входом регулятора, выход сравнивающего элемента через первый релейный элемент с зоной нечувствительности сое-- динен с входами первого апериодичес0 кого звена и формирователя управляющего сигнала, выход которого является выходом регулятора, выход первого апериодического звена соединен с первым вычитающим входом сравнивающего
5 элемента, отличающийся тем, что, с целью расширения области применения за счет увеличения диапазона входных сигналов регулятора и повышения динамической точности, рео гулятор содержит п релейнырс элементов с зоной нечувствительности и п апериодических звеньев, выход сравнивающего элемента соединен с входами п релейных элементов с зоной нечувствительности, выход каждого из которых через соответствующее апериодическое звено соединен с соответствующим вычитающим входом сравнивающего элемента.
5л Б„
5

| название | год | авторы | номер документа |
|---|---|---|---|
| Релейный регулятор | 1989 |
|
SU1695263A1 |
| Многопороговый релейный элемент с опережающей характеристикой | 1989 |
|
SU1629977A1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 1999 |
|
RU2150726C1 |
| Релейно-импульсный регулятор | 1988 |
|
SU1644086A1 |
| Способ формирования управляющегоСигНАлА B РЕлЕйНО-иМпульСНыХСиСТЕМАХ упРАВлЕНия | 1976 |
|
SU796785A1 |
| Способ формирования трехуровневого управляющего сигнала в релейных системах управления динамическим объектом и релейный регулятор для механизации этого способа | 1989 |
|
SU1777119A1 |
| Устройство для контроля релейного регулятора | 1980 |
|
SU930276A1 |
| Релейный регулятор | 1989 |
|
SU1742786A1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2385480C1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2396586C1 |
Изобретение относится к техническим средствам систем автоматического регулирования и может быть использовано для регулирования и управления различными динамическими объектами и технологическими процессами. Целью изобретения является расширение области применения за счет увеличения диапазона входных сигналов регулятора и повышение динамической точности. Регулятор содержит сравнивающий элемент 1, первый 2 релейный элемент с зоной нечувствительности, формирователь 3 управляющего сигнала, первое 4 апериодическое звено, второе 5,... (п+1)-е 5П апериодические звенья и второй 64...(п+1)-й б релейные элементы с зо ной нечувствительности. При использовании предлагаемого регулятора расширяются функциональные возможности регулирования за счет возможности сопряжения конкретных величин ограничений выходных напряжений апериодических звеньев и конкретных датчиков входного сигнала. Отмечается пониже- ние энергопотребления и уменьшение перерегулирования. 2 ил. о « /
Фиг. 2
| Уткин В.И | |||
| Скользящие режимы и их применение в системах с переменной структурой | |||
| К.: Наука, 1974, с | |||
| Насос | 1917 |
|
SU13A1 |
| Способ испытания относительногоСОпРОТиВлЕНия изНОСу КОНСТРуКциОННыХМАТЕРиАлОВ | 1979 |
|
SU796735A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
