Известен ударный механизм с приводом от электрического двигателя через кривошипно-шатунную передачу, с применением автоматически сцепляющегося и расцепляющегося механического соединения между бойком и шатуном.
Сущность изобретения заключается в том, что, с целью предотвращения передачи ударов на корпус механизма от бойка через передачу при условии полного отсутствия в механизме отбойных пружин, указанное механическое соединение выполнено так, что оно расцепляется в момент достижения бойком максимальной скорости и начала замедленного движения сцепленного с бойком конца шатуна, с тем, чтобы боек наносил удар при отсутствии механического соединения его с ша туном, и снова сцеплялся при обратном движении бойка.
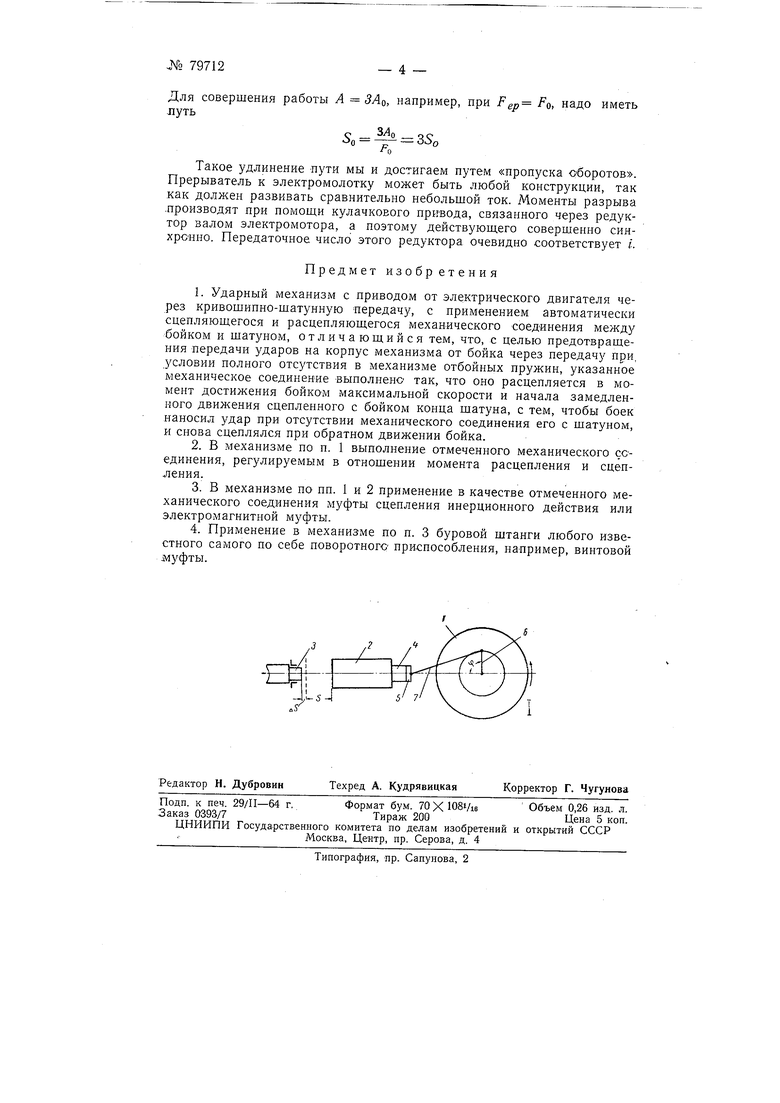
На чертеже изображена схема работы предлагаемого механизма.
Маховик / (может отсутствовать, что зависит от величины момента инерции приводного двигателя), боек 2, рабочий инструмент 3, электромагнит и якорь электромагнита (или вообще какой-либо сцепной механизм) 4-5, кривошип 6 радиуса R, шатун 7.
На чертеже не показаны: привод-асинхронный, высокоскоростной электромотор, прерыватель для электромагнита - маслоструйный или .другой конструкции, редуктор и кулачок для привода прерывателя.
Электромотор приводит в движение кривошипно-щатунный механизм и сообщает П р оборотов в минуту маховым массам. Кинетическая энергия последних будет равна
где / - момент инерции маховых масс.
Л„ : , 180
№ 79712-- 2 -
Если электромагнит включен, боек совершает возвратно-поступательные колебания, проходя за один оборот кривошипа путь
При этом ударов о рабочий инструмент не происходит, так как боек не доходит до него на расстояние (А5). Как известно, скорость вращаюшихся масс максимальна (пшах) в мертвых положениях кривст,113г.
шипа. В положениях, когда - , скорость маховых
масс минимальна (rimin), так как они к этому моменту отдали кинетическую энергию для создания ускорения бойка в предыдушем квадранте. В следуюшем квадранте кинетическая энергия маховых масс возрастает, так как боек отдает свою живую силу вследствие замедления своего движения. За один оборот ротора двигателя имеем:
2 работ сил инерции за период О, S работ сил тяжести за период О,
электромотор работает вхолостую, покрывая только механические потери в механизме.
Скорость точки (В) максимальна, когда и равна скорости цапфы (А) кривошипа
В ЭТОТ момент живая сила бойка
As
где т - масса бойка.
В следуюшем квадранте маховые массы должны получить приростживой силы на величину живой силы бойка, т. е.
- ( - ) j ИЛИ АА Ао
Если в момент, когда
электромагнит будет выключен, боек будет двигаться равномерно (пре-небрегая трением) со скоростью
Ve Vn
И К концу своего хода, равного
Sa S+AS.
при ударе о рабочий инструмент боек отдает свею живую силу, равнуюяб max
- -4-
Очевидно, что в очередном квадранте маховые массы не будут иметь, прироста кинетической энергии, а кривошип придет в мертвое положение со скоростью
L 2,5 5
Т
В А
тР„
р z
2
отузmV -f,
-itnav 1
соответствующей оборотам двигателя, примерно Птш. В этом же мертвом Псложении электромагнит, уже включенный, сцепит боек с кривошипно-шатунным механизмом.
Для того, чтобы боек в положении, когда ср :: - имел опять преж .
нюю скорость УВ , очевидно надо двигателю опять иметь прежние обороты, т. е. восстановить кинетическую энергию маховых масс до прежней величины. Для этого двигатель должен совершить работу
которую можно выразить: Л М ф Если за поворот
мотор при моменте М не сможет произвести работу то он ее может произвести за поворот
Если рассчитать массу бойка, момент инерции маховика и радиус кривошипа так, чтобы спустя определенное количество оборотов (г) цапфа (Л) кривошипа будет иметь прежнюю скорость VА VB Ve, т. е. ту скорость бойка, при которой он может совершить заданную работу удара (Аб), то можно опять выключить электромагнит при положении кривошипа ф - и боек опять произведет удар по рабочему инструменту, отдав ему работу
Итак, в обш.ем случае, в период между ударами бойка о рабочий инструмент электродвигатель должен произвести работу
где i-«пропуск оборотов на разбег для получения прироста кинетической энергии маховых масс.
Очевидно тогда число ударов электромолотка будет
Варьируя величинами (/) и радиусом кривошипа Rj можно менять число ударов бойк-а Z и величины работы одного удара бойка (As). При одном и том же электродвигателе это можно делать в известных пределах.
Таким образом мы можем получить на бойке усилие только Fgp FO, то для совершения работы Л Ло надо иметь путь
- 3 № 79712
A LAjn-Аб,
Т
Л ДЛ;к Лб,
f
тУ2 Аб
Л М ff-i
ер
с 0
, - -J

| название | год | авторы | номер документа |
|---|---|---|---|
| Электроотбойный безредукторный молоток | 1948 |
|
SU89874A1 |
| Бурильный молоток | 1957 |
|
SU109814A1 |
| Соленоидный молоток | 1959 |
|
SU125770A1 |
| Рабочий инструмент для механических молотков | 1947 |
|
SU79769A1 |
| Ударный механизм | 1956 |
|
SU105401A1 |
| ПРИВОД ВРАЩАТЕЛЬНО-УДАРНОГО ДЕЙСТВИЯ | 2005 |
|
RU2285104C1 |
| ВОЗДУШНО-ВАКУУМНЫЙ МОЛОТОК | 1949 |
|
SU85335A1 |
| Компрессионно-вакуумный ударный механизм к отбойным молоткам | 1951 |
|
SU109583A1 |
| Машина ударного действия | 1978 |
|
SU683894A1 |
| МЕХАНИЧЕСКИЙ МОЛОТОК С ЭЛЕКТРИЧЕСКИМ ПРИВОДОМ | 1931 |
|
SU36336A1 |
