Изобретение относится к области автоматики и вычислительной техник и может быть испапьзовано в системах с числовым протрзь-ц тым управлением для формирования шаговых траекторий и подготовки исходной информации для интерполирующих устройств при работе в режиме, обратном проце су интерполирования. Устройство может быть использовано также в телеметрических системах и системах обработки считываемой в режиме следящего преобразования графической информации с целью ее сжатия или устранения избыточности.
Известно устройство 5 содержащее сумматоры, компаратор, логические
элементы Г 11.
Известно также устройство, содержащее счетчики и сзмматоры, к входам которых подключены выходы счетчиков 21.
Эти устройства используются для формирования траекторий в системах с числовым программным управлением.
Однако такие устройства не обеспечивают вьЕюлнения обратного процесса интерполяции, т.е. сжатия информации, no3Tot4y не могут быть использованы для подготовки информации, необходимой для работы интерполяторов.
Наиболее близким к предлагаемому является интерполятор, содержащий два сумматора и два счетчика, подклченных своими выxoдalvIи к входам сумматора, элемент И-НЕ и блок элементов задержки .31,
Недостатком этого устройства является невысокая точность работы в режиме обратной интерполяции, а следовательно;невысокий коэффициент сжатия информации и большой объем требуемой для запоминания информации памяти. Кроме того, при работе в режиме интерполяции известное устройство не позволяет определять момент окончания отрабатываемой траектории и требует для этого привлечения дополнительных средств, что усложняет устройство.
Цепь изобретения - повышение точности и упрощение устройства.
Цель достигается тем, что в интерполятор, содержапщй первый и второй счетчики, соединенные выходами соответственно с первым и вторым входами первого и второго сумматора генератор импульсов, сое1083952
диненный выходом с первыми входами первого и второго элементов И, вторые входы которых подключены к выходу триггера, третьи входы - к вы- 5 ходам второго сумматора, а выходы первого и второго элементов И соединены с первыми входами первого и второго счетчиков и соответственно через первый и второй элементы 10 ИЛИ - с третьим и с четвертым входами второго сумматора, третий и четвертый входы первого сумматора соединены с вторыми входами соответственно второго и первого счет15 чиков импульсов и с вторыми входами второго и первого элементов ИЛИ и с входами первого и второго элементов задерлски, вторые входы первого и второго счетчиков являются вхо20 дани интерполятора, а выходы первого и второго элементов И являются выходами интерполятора, выходы первого и второго сумматоров подключены к первому и второму входам тре5 тьего элемента ИЛИ, введены блок сравнения3 элемент РАЗДЕЛИТЕЛЬНОЕ ИЛИ, третий, четвертый и пятый элементы И, четвертый элемент ИЛИ, третий элемент задержки, выходы пер0 вого и второго счетчиков подключены к первому и BTopoiiy входам блока сравнения, первый и второй выходы которого через третий и четвертый элементы И соединены с первым и вторым входами четвер-того элемента ИШi, соединенного выходом через РАЗДЕШТЕЛЬНОЕ ИЛИ с пятыми входами первого и второго сумматоров, а через третий элемент задержки - с перQ вым входом пятого элемента И, второй вход которого подключен к выходу третьего элемента ИЖ, а выход является третьим выходом интерполятора, вторые входы третьего и четс вертого элементов И соединены с выходами первого и второго элементов задержки соответственно, выход блока сравнения соединен с первым входом триггера, второй вход которого является входом интерполятора.
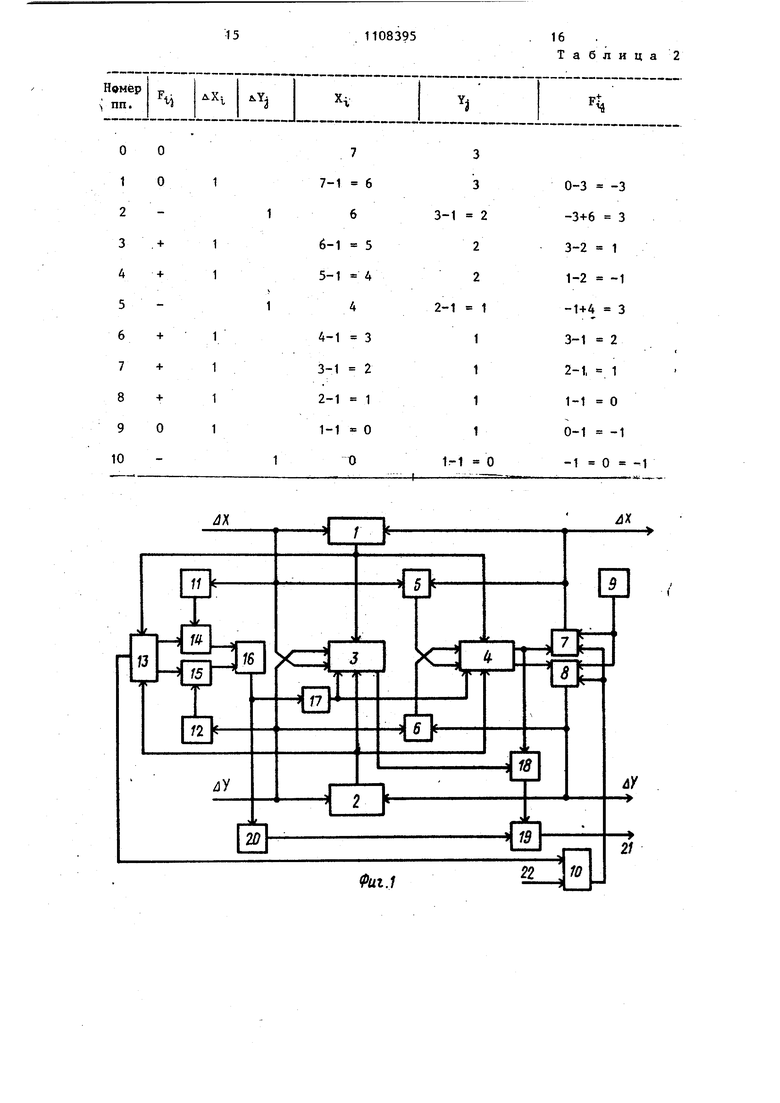
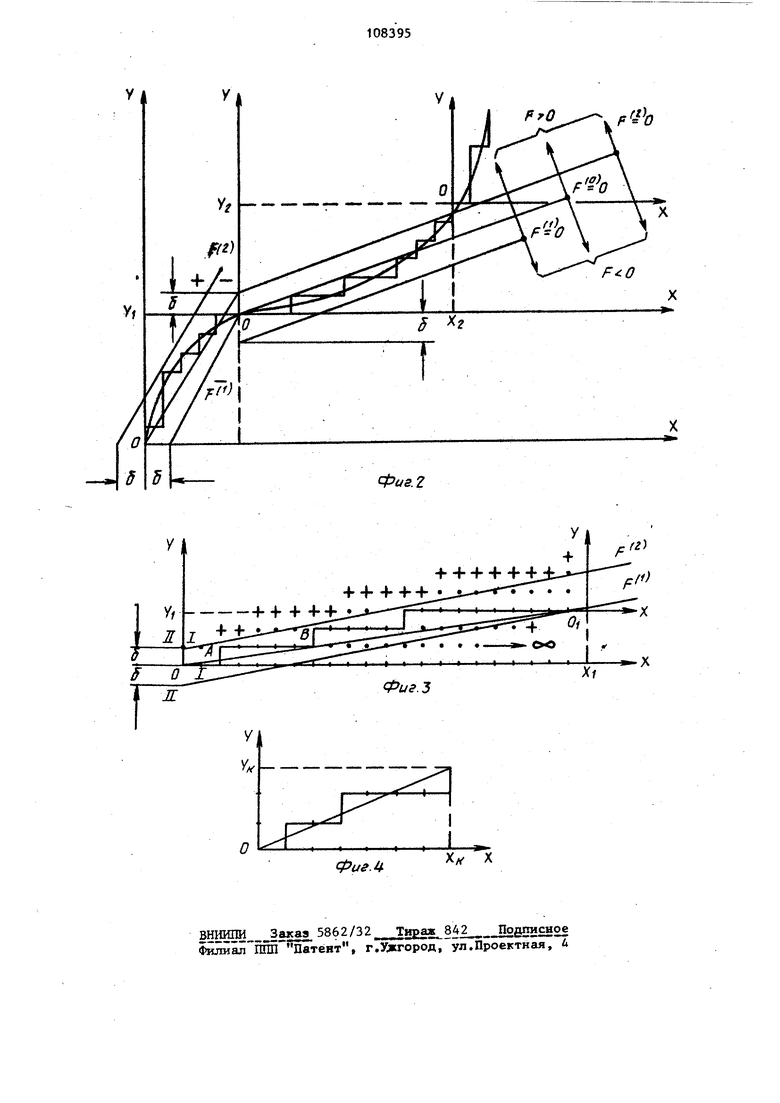
На фиг. 1 представлена структурная схема интерполятора; на фиг. 2 график, поясняющий принцип его работы в режиме обратного интерпо5 лирования,- на фиг, 3 - пример обработки траектории в режиме обратного интерполирования; на фиг. 4 .пример линейной интерполяции.
Интерполятор (см. фиг. 1) содержит первый 1 и второй 2 счетчики, первый 3 и второй 4 сумматоры, первый 5 и второй 6 элементы ИЛИ, первый 7 и второй 8 элементы И, генератор импульсов 9, триггер 10, второй Ни первый 12 элементы задержки, блок сравнения 13, третий 14 и четвертый 15 элементы И, четвертый элемент ИЛИ 16, элемент РАЗДЕЖТЕЛЬНОЕ ИЛИ 17, третий элемент ИЛИ 18, пятый элемент И 19, третий элемент задержки 20, выход интерполятора 21, входную шину 22.
Счетчики 1 и 2 служат для подсчета текущих элементарных приращений координат и хранения текущего значения координаты, сумматоры 3 и 4 накопительного типа - для подсчета оценочных функций.
Первый и второй входы сумматоров используются соответственно для управления арифметической операцией вычитания содержимого второго и суммирования содержимого первого счетчиков с содержимым сумматора. Третий и четвертый входы являются входами операндов. Пятые входы первого и второго сумматоров являются соответственно входами суммирования и вычитания констант, численно равных половине величины допустимой погрешности и используется только в режиме обратной интерполяции. Первый и второй выходы сумматоров являются выходами знакового разряда и являются индикаторами соответственно отрицательного и положительного, включая и нуль, чисел.
Элементы ШШ 5 и 6 используются для сбора сигналов управления сумматором. Элементы И 7 и 8 используются в качестве коммутаторов сигналов при работе устройства в режиме интерполирования. Генератор импульсов 9 служит для выработки тактвых импульсов.Триггер 10 служит для формирования строба, определяющего длительность кадра интерполяции. Элементы задержки 11 и 12 используются для задержки входных сигналов на время, необходимое для суммирования входного единичного импульса с содержимым счетчика. Схема сравнения 13 служит для опргеделения отношений между числовыми величинами содеряшмого первого и второго счетчиков. На первом вьпсоде
сигнал появляется, если содержимое счетчиков равно нулю. На втором выходе схемы сигнал формируется, если содержимое первого счетчика больше содержимого второго счетчика. На третьем выходе сигнал формируется, если содержимое первого счетчика меньше содержимого второго счечика.
Элементы И 14 и 15 пропускают на выходе те входные сигналы, которые формируют большее значение числа в одном из счетчиков. Элемент ШШ 16 служит для сборки сигналов, элемент РАЗДЕЛИТЕЛЬНОЕ ИЛИ 17 для формирования путем распараллеливания входного импульса кода двоичного числа, равного половине допустимой погрешности или половине величины допустимого коридора при работе устройства в режиме обратной интерполяции. Элемент ИЛИ 18 служит для сборки сигналов, элемент И 19 - для формирования сигнала, соответствующего концу формируемого отрезка, элемент задержки 20 - для задержки сигнала опроса элемента И 19 на время, необходимое для выполнения арифметической операции в сумматорах. Выход 21 является выходом интерполятора. Появление на нем сигнала свидетельствует об окончании формирования отрезка. Вхо 22 является входом переключения устройства в режим работы интерполирования.
Принцип работы устройства в режиме обратной линейной интерполяции основан на вычислении двух смещенны на величину + соотносительно центрального отрезка, определяемого оценочной функцией
-Z , ,
(1) 1, 2, 3, ..., I
1, , -5, ..., J|
оценочных функций вида
F/
f AYgX, - |uXi(Y, - (2) 4
и E |&YjX - ((i)4r(3)
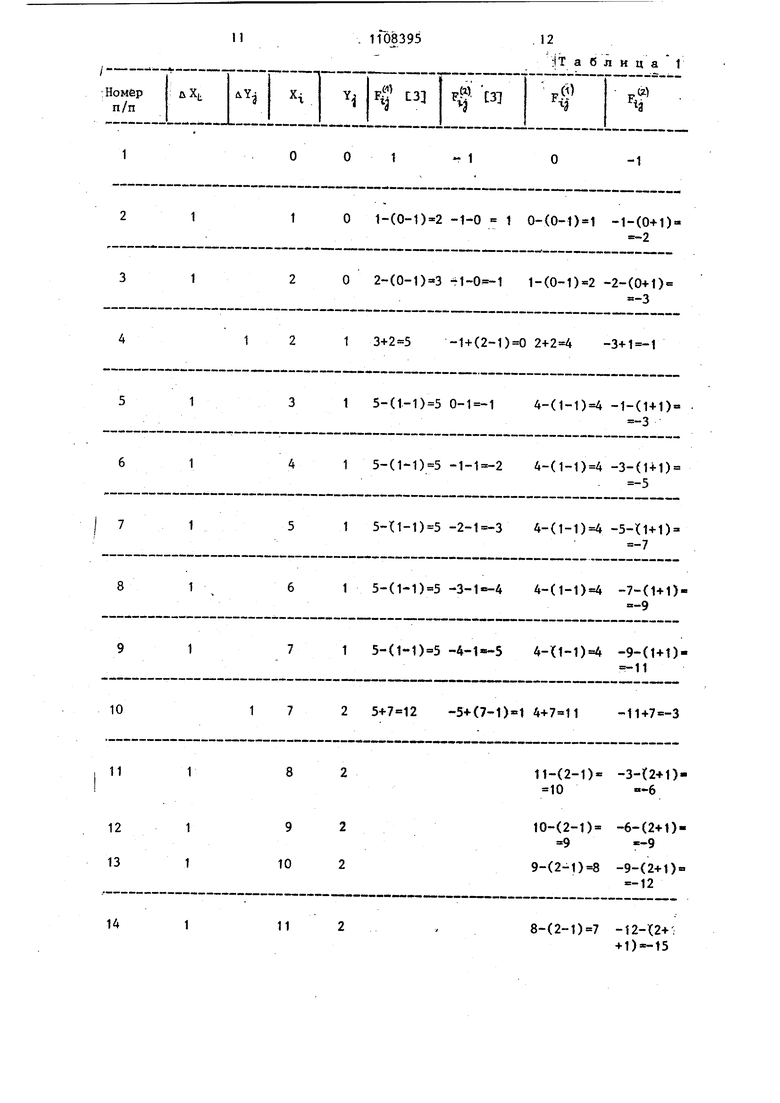
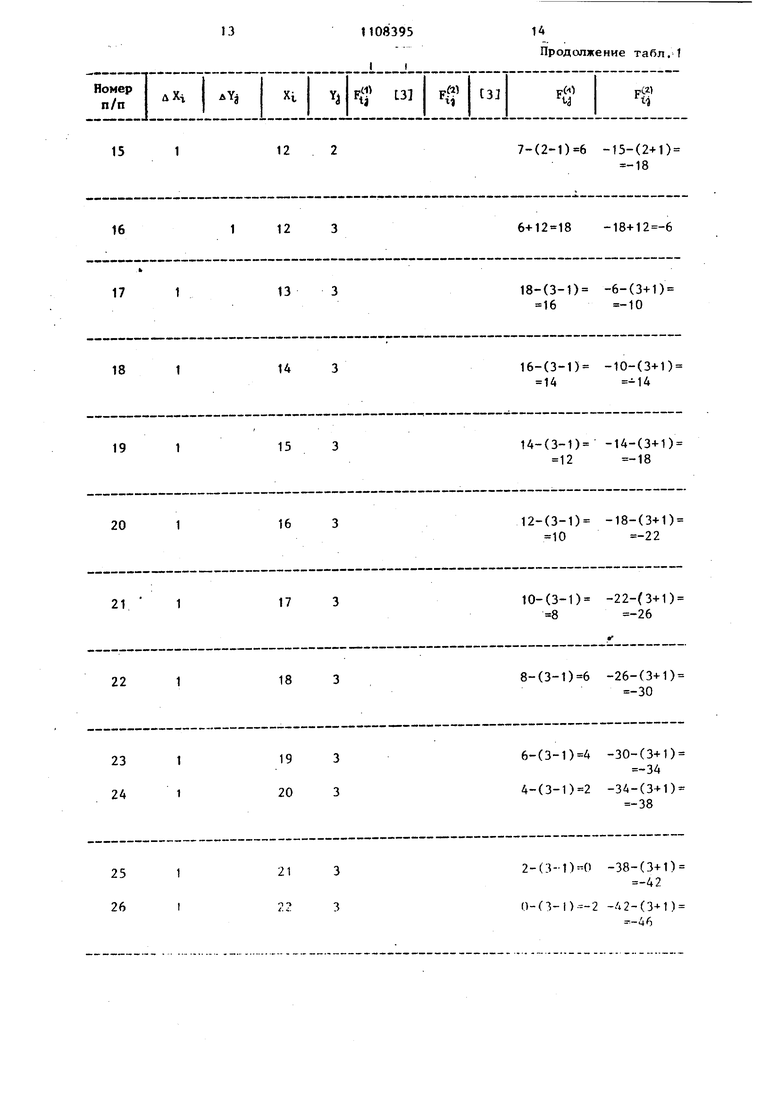
при условии, что между переменными соблюдается условие Х Здесь д XT и uY - элементарные приращения переменных, Х{, .и YJ - текущие значения переменных (Xt 2 лХ, и YJ 2La.Yp и 2сГ - величина допустимой погрешности, оказывающая влияние на степень сжатия информации и величину аппроксимирующего отрезка. Если X; - Y-i , то смещенные относительно друг друга оценочные функции имеют следующий вид (Х. ч-с) -1лХ, (4 X Yj-cT (5 -) Необходимость задания начальных смещений - сГ в выражениях (3) и (5) связана с необходимостью уже на начальном этапе получить для оценочных функций противоположные знаки. Мезкду знаком оценочной функции, определяемой вьфажением (1), и текутзщми значениями ее переменных существует следующая зависимость. Значение оценочной функции равно нулю, если значения переменных лежат на теоретической кривой. Оценочная функция положительна, если текущее значение зависимой переменной больше теоретического значения, и наоборот. Аналогичное соотнощение соблюдается и для смещенных оценочных функ ций . На фиг. 2 показаны законы изменения знаков оценочных функций для точек, лежащих по разные стороны от теоретического отрезка с учетом смещения. Анализ законов изменения оценочных функций (см. фиг. 2) с учётом возможной их реализации, прказьюает, что в качестве одного из условий выхода координаты текущей точки из заданного коридора или условия непринадлежности точки формируемому отрезку является вьшолнение одного из следующих соотношенийF|.O О .или При этом считается, что начальная точка отрезка находится в начале ко ординат. Выражения (2) - (5) и условие (6) определяют алгоритм работы устройства . Одно из основных отличий предлагаемого алгоритма от известного C3J основанного на использовании выражений (с учетом принятой для облегчения сравнительного анализа индексации и ширины коридора 2о): AYjXb -2AXi(Yj - 1) (XT -1) -f состоит в том, что противоположные смещения оценочной функции осуществляются вдоль одной из осей, при том только той, для которой текущее значение одной из двух переменных является меньщим. У прототипа, как это видно из выражений (6) - (7) смещения осуществляются вдоль обеих осей, что приводит к уменьшению величины коридора при малых и больших углах наклона отрезка, в результате этого изменяется величина допустимого отклонения, а вместе с ней изменяются (в сторону уменьшения) коэффициент сжатия и величина аппроксимирукщего отрезка. Этот факт иллюстрируется приведенным на фиг. 3 примером, где цифрами I и II обозначена величина допустимого коридора прототипа и предлагаемого устройства соответственно. Кроме того, известное устройство 3 не позволяет изменять величину допустимой погрешности или величину допустимого коридора, что ограничивает его возможности. Наличие свободного члена сГ в (6) и (7) не обеспечивает необходимой регулировки допустимой погрешности вдоль всей траектории. В табл. 1 приведен пример обработки траектории, заданной своими приращениями, с помощью выражений (6) и (7) для прототипа и выражений (2), (3) и (6) для предлагаемого устройства. Табл. 1 поясняется фиг. 3. Из примера видно, что одной и той же начальной величине допустимого отклонения известный алгоритм выдает более короткие отрезки, чем предлагаемый. Так,в соответствии с алгоритмом прототипа в точке А с координатами (2, 1) был бы зафиксирован конец отрезка, так как оценочная функция F 31 изменила свой знак. В связи с тем, что текущая точка оказалась на границе коридора (F 0)f можно было бы игнорировать зто обстоятельство (ходя у прототипа зто не предусмотрено), но в точке В с координатами (7, 2) вследствие изменения знака F СЗ был бы зафиксирован конец отрезка. Это является следствием влияния угла наклона отрезка на величину
7.
допустимого коридора. Этого недостатка предлагаемый алгоритм не имеет. На фиг. 3 отдельными точками показанй возможные продолжения из предьиущей точки траектории ( исходя из условия, что знак приращений обрабатываемой траектории не меняется), а. крестиками помечены точки выхода из разрешенной (допустимой) области коридора, в которых был бы зафиксирован конец отрезка в случае продолжения траектории в этом направлении. Запрещенные точки над траекторией показаны исходя из условия, что движение из предьщущей точки осуществляется вверх, и под траекторией - исходя из условия движения вправо, т.е. в сторону увеличения координат. В результате обработки траектории с порогом сГ 1, в соответствии с приведенным примером, сформирован отрезок 00 , значения проекций которого соответственно равны Х и У, , а величина погрешности не пре.вышает 2сГ
При необходимости величину погрешности можно уменьшить коррекцией координаты на одно элементарное приращение, т.е. возвратившись к предьдущему шагу.
Устройство в режиме обратной интерполяции работает следующим образом.
В исходном состоянии счетчики 1 и 2, сумматор 3- и триггер 10 обнулены, а в сумматор А занесено значение константы - сГ. Поступающие на входы счетчиков 1 и 2 единичные элементарные приращения переменных
дХ-i и дУ накапливаются в них, фо мируя значения текущих переменньк Xj, и YJ .С приходом каждого приращения лХ на вход сумматора 3 и через элемент ИЛИ 5 на вход сумматора 4 из содержимого сумматоров 3 и 4 вычитается накопленное к тому времени значение содержимого счетчика 2. С приходом каждого приращения iY на вход сумматора 3 и через элемент ИЛИ 6 на вход сумматора 4 накопленное к этому времени значение содержимого счетчика 1 суммируется с содержимым сумматоров 3 и 4.
В процессе работы схема сра нения 13 сравнивает содержимое счетчиков между собой и вьщает на один из элементов И 14 или И 15 разре083958
шакщий потенциал. Если содержимое счетчика 1 больше содержимого счетчика 2, разрешающий потенциал подается на вход элемента И 14, в про5 тивном случае - на вход элемента
И 15. Входные импульсы через соот- ветствующие элементы задержки 11 и 12 поступают на другие входы элементов И 14 и 15 и проходят через
10 один из открытых элементов И 14 или 15 и через элемент ИШ 16 на вход элемента РАЗДЕШТЕЛЬНОЕ ИЛИ 17 с выхода которого в сумматоры 3 и,4 заносится соответственно знаf5 чение константы плюс и минус cf, численно равной половине величины допустимого коридора, в котором должен находиться формируемый отрезок. В результате этого в сумма20 торах 3 и 4 формируются соответственно значения оценочных функций и FXJ в соответствии с выражениями (2) и (3), если Х- Yj , или (4) и (5), если Х .
25 При выходе обрабатываемой траектории из пределов заданного коридора одна из оценочных функций меняет свой знак на противоположный, что вызывает появление на соответствую30 Щ выходе знакового разряда одного из сумматоров сигнала, который через элемент ИЛИ 18 поступает на вход элемента И 19, разрешая прохождение задержанного элементом задержки 20 сигнала на выход устройства 21 и считывание со счетчиков относительных координат или величин проекций сформированного вектора. После считывания информации счетчики и сумматоры устанавливаются в исходное состояние, и устройство готово к обработке очередных поступающих на его вход приращений.
45 Совокупность сформированных таким образом отрезков аппроксимирует с заданной точностью обрабатываемую траекторию. Точность аппроксимации регулируется шириной задаваегп мого коридора 2.
Принцип работы устройства в режиме линейной интерполяции основан на вычислении оценочной функции, 55 определяемой выражением
Ч
( -Z.6Xt(Y-7iYp,
(X uY ) ( Ь 3 0 их,, AYj) Q
1, л) 0, если F : 0,
где Xi и Y; - количество шагов, ко iторые необходимо отработать до конечной точки отрезка.
Эти значения подсчитываются счетчиками 1 и 2 соответственно, а само значение оценочной функции подсчитывается сумматором 4,
Подобная организация работы, когда число оставшихся шагов подсчитываете самими счетчиками интерполятора до их полного обнуления, позволяет экономить оборудование. В режиме линейной интерполяции устройство работает следующим образом.
Перед началом работы в счетчики
1и 2 вводятся значения величин проекций отрабатываемого отрезка X и
Y, сумматор 4 при этом должен быть обнулен. С поступлением на вход 22 триггера 10 импульса Начало кадра триггер изменяет свое состояние на противоположное, и разрешающий потенциал с его выхода прикладывается к входам элементов И 7 и 8, на другие входы которых поступают импульсы от генератора импульсов 9. Если содержимое сумматора 4 больше или равно нулю, то на вход элемента И 7, связанный с выходом.-сумматора,подается разрешающий потенциал, и импульсы с генератора импульсов 9 проходят через элемент И 7 и поступают на вход счетчика 1, вычитая из его содержимого единичное приращение АХ. Одновременно эти же импульсы через элемент ИЛИ 5 поступают на вход сумматора 4, вызывая вычитание содержимого счетчика
2из содержимого сумматора. Этот процесс продолжается до тех пор, пока знак содержимого сумматора не изменится на противоположный и не станет отрицательным. Это вызывает
появление разрешающего потенциала на выходе сумматора, связанном с
элементом И 8, а разрешакяций потенциал на выходе сумматора, связанном с элементом И 7, исчезает. В результате импульсы с генератора импульсов 9 проходят через элемент И 8 на вход счетчика 2, вычитая из его содержимого единичное приращение йУ. Эти же импульсы, поступая через элемент ИЛИ 6 на вход сумматора 4, вызывают суммирование содержимого счетчика 1 с содержимым сумматора 4. Этот процесс продолжается до тех пор, пока содержимое сумматора не станет равным нулю или изменит свой
знак на противоположный. При этом разрешающий потенциал на входе элемента И 8, связанном с выходом сумматора, исчезает и появляется на выходе, связанном с входом племента И 7. Описанный колебательный цикл работы интерполятора повторяется до тех пор, пока содержимое обоих сметчиков не станет равным нулю. Схема сравнения 13 при этом вьфабатывает сигнал, поступающий на вход триггера 10. Разрешающий потенциал на выходе триггера исчезает, и работа устрой ства после обнуления счетчиков и сумматора заканчивается.
Импульсы, появлякициеся в процессе работы интерполятора на выходах элементов И 7 и 8, используются для управления шаговым приводом исполнительных устройств.
Пример, иллюстрирующий описанный принцип работы устройства, приведен в табл. 2 и на фиг.4.
По сравнению с базовым устройством предлагаемое обеспечивает большие точность и коэффициент уплотнения или сжатия информации, а также высокую точность восстановления траектории между заданными опорными точками. Свойство обратимости превращает интерполятор в универсальное средство обработки информации, позволяет сократить объем требуемого оборудования и расширить область его применения в системах автоматики и телемеханики.
:1Т а б л и ц а 1
| название | год | авторы | номер документа |
|---|---|---|---|
| Интерполятор | 1978 |
|
SU798729A1 |
| Линейный интерполятор | 1988 |
|
SU1522157A1 |
| Линейно-круговой интерполятор | 1985 |
|
SU1259218A1 |
| Линейный интерполятор | 1989 |
|
SU1674064A1 |
| Линейный интерполятор | 1986 |
|
SU1413603A1 |
| Интерполятор | 1983 |
|
SU1089551A1 |
| Многокоординатный линейно-круговой интерполятор | 1984 |
|
SU1156008A1 |
| Цифровой линейный интерполятор | 1991 |
|
SU1807450A1 |
| Линейный интерполятор | 1991 |
|
SU1809421A1 |
| Линейный интерполятор | 1986 |
|
SU1383302A1 |
ИНТЕРПОЛЯТОР, содержащий первый и второй .-счетчики, соединенные выходами соответственно с пepвы f и вторым входами первого и второго сумматора, генератор импульсов, соединенный выходом с первыми входами первого и второго элементов И, вторые входы которых подключены к выходу триггера, третьи входы - к выходам второго сумматора, а выходы первого и второго элементов И соединены с первыми входами первого и второго счетчиков и соответственно через первый и второй элементы ИЛИ - с третьим и с четвертью входами второго сумматора, третий и четвертый входы первого сумматора соединены с вторыми входами соответственно второго и первого счетчиков импульсов и с вторыми входами второго и первого элементов .ИЛИ и с входами первого и второго элементов задержки, вторые входы первого и второго счетчиков являются входами интерполятора, а выходы первого и второго эЯементов И являются выходами интерполятора, выходы первого и второго сумматоров подключены к первому и второму входам третьего элемента ИЛИ, отличающийся тем, что, с целью повышения точности и упрощения интерполятора, в него введены блок сравнения, элемент РАЗДЕЛИТЕЛЬНОЕ ИЛИ, третий, четвертый и пятый элементы И, четвертый элемент ИЛИ, третий элемент задержки, выходы первого и второго счетчиков подклкгчены к (Л С первому и второму входам блока сравнения, первый и второй выходы которого через третий и четвертый О элементы И соединены с первым и е вторым входами четвертого элемента ИЛИ, соединенного выходом через РАЗДЕЛИТЕЛЬНОЕ ИЛИ с пятыми входа- i ми первого и второго сумматоров, а через третий элемент задержки - с первым входом пятого элемента И, 00 второй вход которого подключен к оо со сд выходу третьего элемента ИЖ, а выход является третьим выходом интерполятора, вторые входы третьего и четвертого элементов И соединены с выходами первого и второго элементов задержки соответственно, выход блока сравнения соединен с первым входом триггера, второй вход которого является входом интерполятора.
14
11
8-(2-1)7 -12-Х2+; -i-1)-t5
Продолжение табл. t
I I
О О
7-1 6
6-1 5
, +
+ 5-1 4
4-1 3
+ + 3-1 2 2-1 1 1-1 О
3
3
0-3 -3 -1 2 -3+6 3
2 3-2 1
2 1-2 -1 -1 1 -1+4 3
1 3-1 2
1 2-1, 1
1
1 0-1 -1 1.-1 О -1 О -1
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США № 3763363, кл | |||
| Способ отопления гретым воздухом | 1922 |
|
SU340A1 |
| Планшайба для точной расточки лекал и выработок | 1922 |
|
SU1976A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
