силы привода и генератор колебаний. Наложение дополнительр1ых колебаний на силу привода компенсирует зону неопределенности сил трения покоя, что позволяет повысить точность измерений в этом устройстве 2.
Однако при этом ухудшаются динамические и энергетические характеристики устройства,.
Цель .изобретения - улучшение динамических и энергетических характеристик устройства.
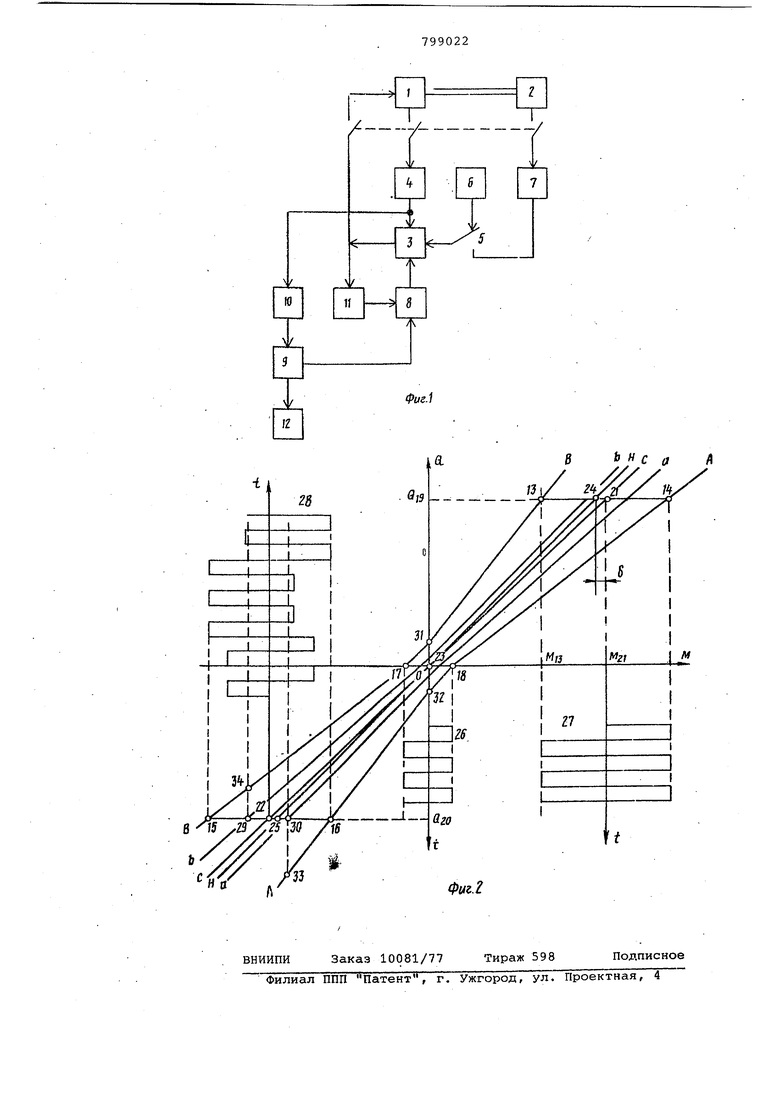
. Цель достигается тем, что в устройство для управления реверсивным приводом с механической передачей, содержащее исполнительный орган, автоматический регулятор силы привода и генератор колебаний, введены датчики силы привода и перемещения исполнительного органа, вычислительное устройство, блоки усреднения силы привода и выключения колебаний, измерительный прибор и задатчик. Причем выход датчика силы привода соединен с первым входом автоматического регулятора силы привода и входом блока усреднения, выход которого соединен с входом вычислительного устройства, соединенного выходами с измерительнь1м прибором и первым входом генератора колебаний, второй вход которого через блок выключения колебаний соединен с выходом автоматического регулятора силы привода, соединенного вторым входом с выходом генератора колебаний, а третьим через дополнительно введенный перекл1рчатель с выходами задатчика и датчика перемещений. На фиг. 1 показана блок-схема устройства для управления реверсивным приводом; на фиг. 2 - графики обобщенных сил .и колебаний.
Устройство содержит привод 1 с механической передачей и исполнительный орган 2. К приводу присоединен автоматический регулятор 3 силы привода, входы которого связаны с датчиком 4 силы привода и через переключатель 5 с датчиком перемещения или задатчиком б. Датчик 4 силы привода соединен с приводом, а датчик 7 перемещения - с исполнительным органом, К автоматическому регулятору 3 подключен генератор 8 колебаний, один из входов которого через последовательно соединенные вычислительное устройство 9 и блок 10 усреднения силы привода соединен с датчиком 4 илы привода, другой через блок 11 ыключения колебаний соединен с выхоом автоматического регулятора. К ычислительному устройству 9 подсоеинен измерительный прибор 12.
На фиг. 2 показана зона трения пооя в системе координат М и Q, де М - обобщенная сила привода; Q - обобщенная сила исполнительного ргана; линия А - граница фактического трогания в положительном направлении ( ход машины вперед ) линия В - фактическая граница тргания в противоположном направлении (ход машины назад); прямая н нейтральная линия, на которой сила трения (момент трения) равна нулю т.е. М - Q j .
Зона, ограниченная линиями А и В является зоной трения покоя (определяется экспериментально), Отрезки 13-14, 15-16, 17-18 - некоторые характерные горизонтальные отрезки зоны трения покоя при значениях Q в точках 19 и 2j и при нулевом значнии Q . Точки 21,22 и 23 - средние точки горизонтальных отрезков. 14 Ц- аГ 1г-°
В рассматриваемом частном случае зона трения покоя симметрична относительно начала координат и средняя точка 23 совпадает с точкой 0.
Точки-, находящиеся посередине горизонтальных отрезков, например 21, 22 и 23, названы средними точками, а их 1вометрическое место - линия С - названа средней линией. Точки, находящиеся на пересечении горизонтальных отрезков с нейтральной линией н, например 24,25 и О нейтральные точки. cf - поправка, равная приращению силы привода в нейтральной точке относительно средней точки одного горизонтального отрезка(Например для отрезка 13-14 сГ 2i а и b - линии трогания задаваемой зоны трения покоя (аналогичны А и В). .
На фиг. 2 показаны также графики прямоугольных колебаний 26 и 27 результирующей силы в зависимости от времени t с постоянными амплитудами, равными половине горизонтальных отрезков 17-18, 13-14, зон трения относительно средних точек 2 и 21 соответственно. График прямоугольных колебаний 28 соответствует частичной компенсации трения покоя в отрезке 15-16 относительной средней точки 22 и относительно точек 29 и 30.
Устройство может работать как в режиме точного измерения силы исполнительного органа, так и в режиме точного ее задания. Возможен режим частичной компенсации трения ПОКОЯ, зона трения покоя произвольно сужается в требуемых пределах.
Система в режиме измерения- рабо-тает следующим образом.
Если машина находится в остановленном состоянии под нагрузкой, то при изменении , в границах зоны трения А-8,т.е. например- 1718-31-32, трсгания не происходит. Если в этот момент включить автомаческий регулятор 3 и с помощью генератора 8 колебаний подать на еговход колебания 26, амплитуда которых равна половине горизонтального размера зоны трения покоя (фиг. 2), то при результирующая сила периодически выходит за границу А, т.е. установка периодически трогается в положительном направлении с частотой наложенных колебаний, к,-. - координата средней точки горизонтального сечения. При аналогично происходит пери одическое трогание привода в противо положном направлении. Очевидно, что при М(Г(1-О трогания не. происходи Сигнал о трогании с помощью датчика 7 перемещения через переключатель 5 подается на вход автоматичес кого регулятора 3, который, ваздей-ствуя на привод, уменьшает или увеличивает до тех пор, пока точка (, Q) не выйдет на среднюю линию с, в этот момент машина останавливается. Требуемая амплитуда колебаний задается с помощью вычислительного устройства 9 в зависимости от сигнала М , получаемого от датчика 4 силы через блок 10 усреднения силы, представляющего собой фильтр низких частот. На измерительный прибор 12 от вычислительного устройства 9 подается усредненное во времени. значение силы с учетом поправки rf В момент остановки привода показания прибора соответствуют MQtcf MH т.е. точке, лежащей на нейтральной линии, где М Q.i Таким образом, по показаниям М можно установить значение Q , С воз растанием Q (сила на исполнительном органе имеет случайную составляю щую) автоматичедки, как было указано выше, возрастает сила привода М и одновременно на вход автоматическо го регулятора 3 через цепочку: датчи 4силы, блок 10 усреднения силы, вычислительное устройство 9, генератор 8-колебаний подаются колебания,, амплитуда которых возрастает в соответствии с увеличением горизонтального размера зоны трения покоя. Например, при Q Q2.f амплитуда 3 14 21 Автоматический регулятор 3 увеличивает М до тех пор, пока точка (h -jQ--) не выйдет на среднюю линию. В этот момент установка перестает трогаться и прибор 12 показывает значение М Q. . Датчик 7 перемещения необходим для автоматической остановки механической системы. Когда переключатель 5соединяет автоматическ-ий регулятор 3 с датчиком 7, установка работает в режиме измерения силы исполнительного органа. Если в рассматриваемой на фиг,1 схеме переключателем 5 к входу автоматического регулятора 3 присоединит задатчик 6, установка будет работать в режиме задания силы исполнительного органа. Работа установки Е режиме задания, в отличие от работы в режиме измерения, может быть эффективна только в том случае, когда существует составляющая силы, зависящей от перемещения, например в лебедках. Здесь при превышении нагрузки лебедка потравливает трос и- этим уменьшает нагрузку до заданной величины. Причем потравливание троса происходит весьма экономно, так как обеспечивается высокая точность за счет исключения зоны трения покоя. Очевидно, могут быть случаи, ког-. да согласно технологическому процессу нужен только режим задания или только режим измерения, например для лебедок (боковых-) траншейного землесоса - или для крансч, взвешивающего груз. В первом случае из схемы на фиг. 1 г-югут быть исключены датчик 7 перемещений и .переключатель 5, а задатчик G . непосредственно присоединен к входу автоматического , peryjisjTopa 3. Во втором случае можно исключить из схемы задатчик б и переключатель 5;а датчик 7 соединен с нходом. автоматического регулятора 3. Блок 11 выключения колебаний в любом случае служит для выключения генератора 8 колебаний в рр.жиме непрерывного вращения машины, когда определенность трения исчезает. Практически часто возникает задача Сужения зоны трения покоя, так как полное ее исключение вызывает автоколебательные процессы в автоматизированном приводе. Для этого, воздействуя на вычислительное Устройство 9 корректирующим сигналом, можно уменьшить степень компенсации: отношение амплитуды колебаний а 1C половине горизонтального размера зоны трения покоя - Ь- О (а /Ь)-/ при q/b-O - режим нулевой компенсации ,- режим полной к мпенсаНа графике 28 (фиг.2) показан случа 70%-ной компенсации q/t)-O,7 . -Пусть находится в окрестности точки 20. Если 7 .Qi 33 то результирующая сила М.,- ч- а периодически выходит за границу А, т.е. установка периодически трогается в положительном направлении. ,При М М , (1.Q,, аналогично происходит трогание в противоположном направлении. В случае г М, (1.-(1,- Q „ машина останавливается. При работе установки в режиме изменения сигнал перемещения- исполнительного органа 2 датчиком 7 через переключатель 5 подаетс-я на вход автоматического регулятора 3, который, воздействуя на привод 1, уменьшает или увеличивает м - до тех пор, пока точка (М.-, ) не войдет в зону, ограниченную линиями а-Ь f В этгот момент происходит остановка привода.
При работе установки в режиме задания односторонние перемещения исполнительного органа приводят к изменению его силы Q и к автоматической остановке машины при значении силы исполнительного органа, равной заданной на зещатчике б, с точностью до ширины зоны а-Ь. Например, натяжение троса зависит от угла поворота барабана лебедки и при периодическом изменении угла поворота в сторону, например наматывания сила Q увеличивается. Когда точка ()входит в зону, ограниченную линиями а-Ь, система останавливается.
При изменении ,(1 амплитуда колебаний, задаваемая с помощью вычислительного устройства 9 в зависимости от сигнала М
и корректирующего сигнала, уменьшается пропорционально выбранной степени компенсации О / Ъ - 0,7 .
Таким образом, в зависимости от корректирующего сигнала, т.е, от степени компенсации а/Ъ , можно задать в пределах фактической зоны А-В любую ширину требуемой зоны трения покоя а-Ь- В более общем, случае/ введя в вычислительное уст.ройство программы изменения корректирующего сигнала, можно задать любую конфигурацию зоны трения покоя в рамках фактической, что позволяет оптимизировать выбор параметров диНс1мической системы по точности и демпфирующим характеристикам.
Предлагаемое устройство может быть использовано в автоматизированном приводе оперативных лебедок земснарядов. Кроме того, оно может быть применено в натурных аэрогидродинамических испытаниях для измерения сил и моментов на рулях или сил сопротивления, в том.числе и при испытаниях в аэрогидродинамических трубах. Его можно использовать для взвешивания грузов непосрбдственно при перегрузке их подъемными кранами.
. Формула изобретения
Устройство для управления реверсивным приводом с механической передачей, содержащее исполнительный орган, автоматический регулятор силы привода и генератор колебаний, 5 отличающееся тем, что, с целью улучшения динамических и энергетических характеристик устройства, в него введены датчики силы привода и перемещения исполнительного орган.а, 0 вычислительное устройство, блоки
усреднения силы привода и выключения колебаний, измерительный прибрр и задатчик, пг ичем выход датчика силы привода соединен с первым входом 5 автоматического регулятора силы привода и входом блока усреднения,, выход которого соединен с входом вы. числительного устройства, соединенного выходами с измерительным прибо- ром и первым входом генератора колебаний, второй вход которого через блок выключения колебаний соединен с выходом автоматического регулятора силы привода, соединенного вторым входом с выходом генератора колеба5 НИИ, а третьим - через дополнительно
введенный переключатель - с выходами : задатчика и датчика перемещений, i Источники информации,
принятые во внимание при экспертизе 0 1.Авторское свидетельство СССР , 186182, кл. G 01 М 13/04, 1966.
2.Авторское .свидетельство .СССР № 285267, кл. F 16 С 39/06, 1970.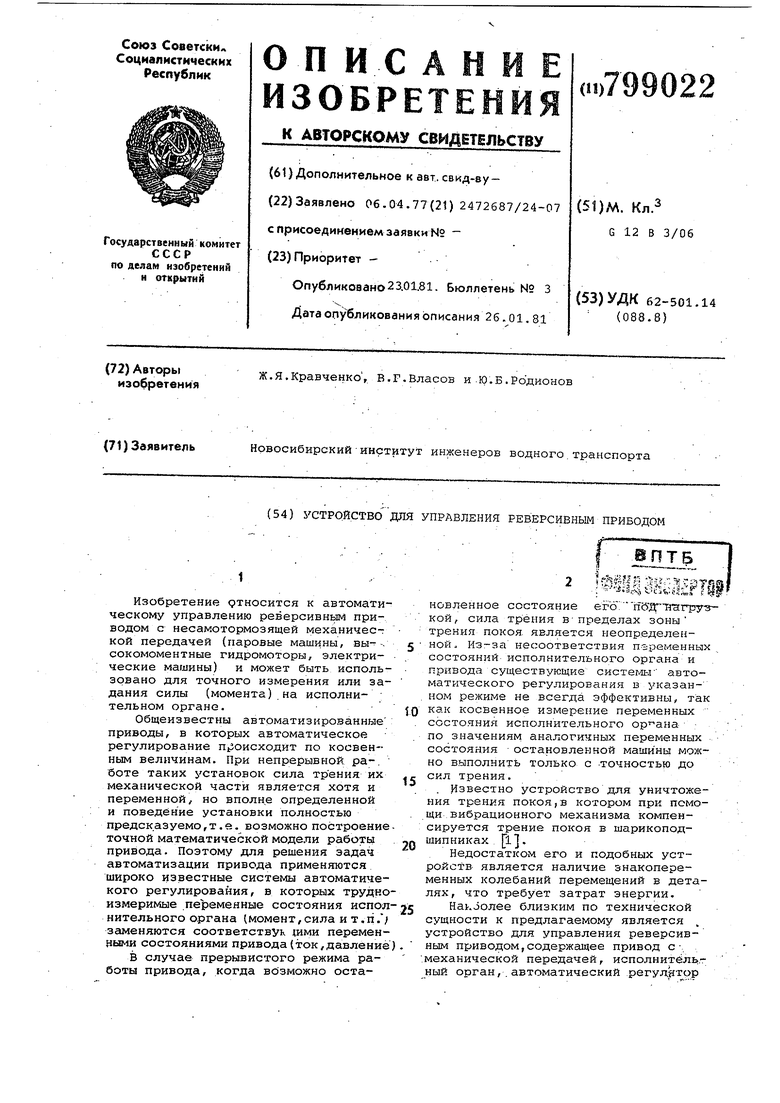
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2016 |
|
RU2628757C1 |
| Устройство диспетчерского управления распределением воздуха в горных выработках метанообильных угольных шахт | 1986 |
|
SU1423745A1 |
| Способ автоматического управления процессом получения извести в шахтной печи | 1987 |
|
SU1571378A1 |
| Устройство для регулирования тепловым режимом вагранки | 1980 |
|
SU907371A1 |
| Устройство автоматической стабилизации дутьевого режима доменной печи | 1982 |
|
SU1126606A1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ТЕХНИЧЕСКИ ОПТИМАЛЬНЫМ УГЛОМ НАКЛОНА НЕПОДВИЖНОЙ НАПРАВЛЯЮЩЕЙ ПОВЕРХНОСТИ ДВИЖЕНИЯ ВЗВЕШИВАЕМОЙ И ДОЗИРУЕМОЙ СЫПУЧЕЙ СМЕСИ САМОТЕКОМ ЗА СЧЕТ СИЛЫ ЗЕМНОГО ТЯГОТЕНИЯ ПРИ ПРИГОТОВЛЕНИИ И РАЗДАЧЕ КОРМОВ И КОРМОВЫХ СМЕСЕЙ В ЖИВОТНОВОДСТВЕ И ПТИЦЕВОДСТВЕ | 2014 |
|
RU2597437C2 |
| Программный регулятор | 1986 |
|
SU1495745A1 |
| Система управления тепловым режимом стекловаренной печи | 1978 |
|
SU753793A1 |
| Следящий электропривод с компенсацией люфта | 1981 |
|
SU981929A1 |
| Устройство для автоматического управления процессом улавливания бензольных углеводородов из коксового газа | 1981 |
|
SU971442A1 |