1
Изобретение относится к сейсморазведочной технике, а именно к устройствам для управления источником сейсмических сигналов вибргщиониого действия.
Известна система управления вибрационными источниками сейсмических, сигналов, содержащая эадеаапяК генератор, блок управления и бгаэк фазовой коррекции, обеспечивающие соответствие фаз выходного сигнала вибраTOfia и контрольного сигнала 13 Сигнал обратной связи в системе берется с сейсмоприемиика, установленного около опорной плнты вибратора. Недостатком данной системы явля |(гся то, что при разных грунтах наблюдается несоответствие по фазе между сигигшом сейсмоприемника и движением опорной плиты вибратора. Кроме того, сейсмоприемник на частоте,близкой к собственной, вноси большие фазовые искажения.
Известна система управления, в которой сигнал обратной связи по перемещению опорной плиты, подаваемой на блок фазовой коррекции, снимается с датчика ускорения,например пьезоэлектрического типа, установлеиого на опорной плите вибратора 2
в диапазоне средних и высоких частот более 15-20 Гц величина и форма сигнала, снимаемого с датчика ускорения, обеспечивает нормальную работу блока фазовой коррекции. При частотах ниже 15 Гц величина выходного йигнала основной гармоники датчика ускорения становится меньше уровня высокочастотных составляющих,
0 на фоне КОТО1ЯЛХ основной сигнал практически неразличим, причем его невозможно вбщелить без фазовых искажений. Поэтому блок фазовой коррекции, испольузпщийся в качестве обратной
5 связи по фазе сигнала датчика ускорения, работает неудовлетворительно в области ниаких частот менее 15 Гц. ,
Нсшболее близкой по техническим свойствам к предлагаемому изобрете0нию является система управления вибрационным источником сейсмических сигналов, содержащая згщающий генератор, бдок управления, блок фазовой коррекции, установленные на массе
5 статической подгрузкИ|И датчик ускорения , смонтированный на опорной плите, выход которого связан с входом блока фазовой коррекции -3.
Недостатком известной системы яв0 ляется то, что на низких частотах обратная связь осуществляется по сигналу перемещения реактивной массы относительно опорной плиты, который не совпадает с перемещением опорной плиты. Причем эта разность фаз зависит от свойств грунта и на частотах 10-15 Гц на мягких грунтах может составить 60-70®.
Таким образом, данная система на низких частотах не обеспечивает точного состояния фазы движения опорной плиты вибратора фазе контрольного сигнала.
Цель изобретения - повышение точности воспроизведения контрольного сигнала вибратора в области низких частот.
Поставленная цель достигается тем что между массой статической подгрузки и опорной плитой установлен датчик перемещения, выход которого соединен с выходом датчика ускорения.
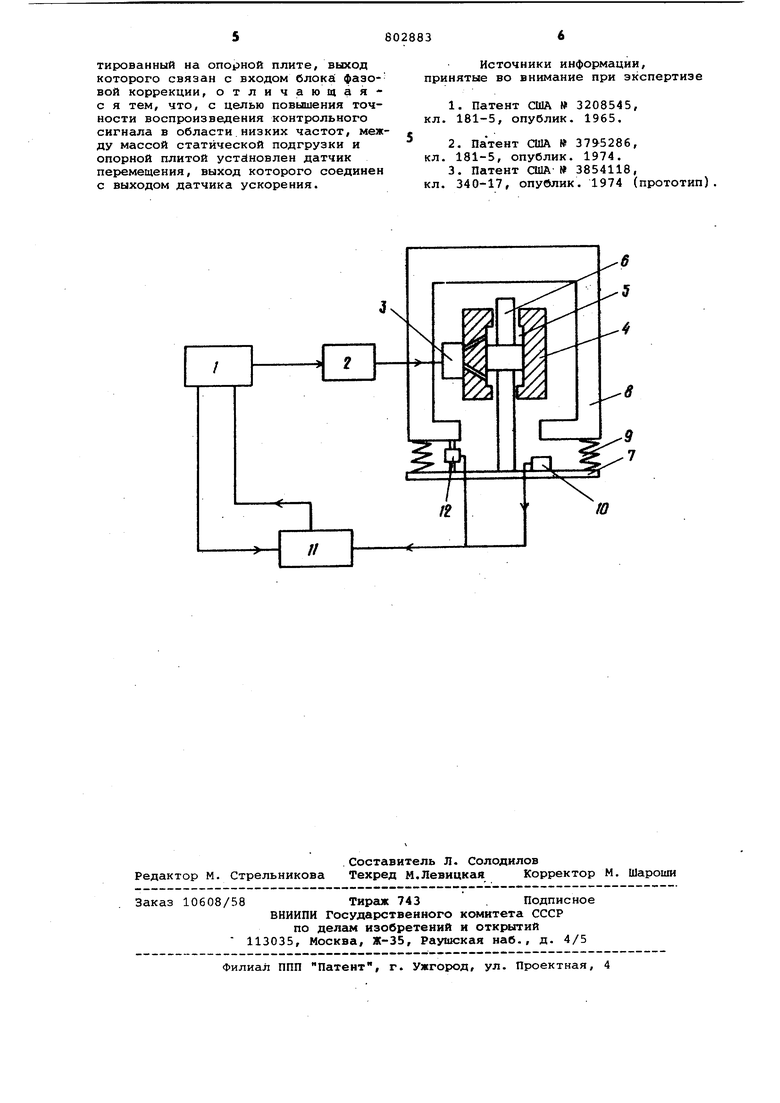
На чертеже изображена функциональная схема предлагаемой системы.
Задакнций генератор 1 соединен с блоком управления 2. Выход блока 2 управления связан с гидроусилителем 3, который закреплен на реактивной массе 4 возбудителя вибрации и связа с цилиндром 5, выполненным в реактивной массе 4. В цилиндре 5 расположен плунжер б, жестко связанный с опорной плитой 7, на которой установлена масса 8 статической подгрузки посредством упругих связей 9 (например, пневмоопора:) .На опорной плите 7 смонтирован датчик ускорения 10,соединенный с входом блок 11 фазовой корреции.Между массой 8 статической подгрузки и опорной плитой 7 установлен датчик 12 перемещения силы скорости, выход которого соединен с выходом дачика ускорения.
Система управления работает следущим образом.
Задающий генератор 1 вырабатывает контрольный и рабочий сигналы. Рабочий сигнал поступает на блок управления 2, который управляет работой гидроусилителя 3 и обеспечивает движение опорной плиты 7 в соответствии с рабочим сигналом. Из-за динамических свойств системы вибратор-землд движение опорной плиты 7 не совпадает по фазе с рабочим сигналом, отставая от него на определенный угол, зависящий от свойств системы управления и грунта. Для приведения в соответствие фазы движения опорной плиты контрольному сигналу блок 11. фазовой коррекции сравнивает фазу движения опорной плиты 7 с фазой контрольного сигнала и в соответствии с этим изменяет фазу рабочего сигнала так, чтобы движение опорной плиты полностью соответствовало по фазе контрольному сигналу.
Сигнал обратной связи движения опорной плиты снимается с датчика ускорения.
На низких частотах (4-15 Гц) этот сигнал настолько мал, что невозможно выделить основную гармонику из шумов и высших гармоник. Собственная резонансная частота системы, зависящая о массы 8 статической подгрузки и упругих связей 9, выбирается меньше нижней границы диапазона рабочих частот вибратора, поэтому в рабочем диапазоне tacTOT колебания опорной плиты 7 не передаются на массу 8 и она практически неподвижна. Благодаря этому датчик 12 перемещения выр1абатывает сигнал, пропорциональный перемещению опорной глиСы 7. Так как на других частотах перемещение опорной плиты значительное (на частотах 15-20 Гц до 5 мм), то на выходе датчика 12 имеется сигнал, значительно превышающий сигнал с датчика ускорения 10 и достаточный для работы блока 11 фазовой коррекции. Этот сигнал суммируется с сигналом датчика ускорения, и во всем диапазоне частот обеспечивается нормальная работа блока 11 фазовой коррекции. При этом повышается точность воспроизведения по фазе контрольного сигнала, особенно в области низких частот. Если конструкция вибратора при установке источника в рабочее положение приводит к значительному изменению расстояния между массой статической на грузки и опорной плитой 7 и к статическому смещению датчика 12 относительно среднего .положения, то выход датчика 12 перемещения необходимо соединить с выходом датчика ускорения через блок вьвделения динамической составляющей (не показан).
Вместо датчика перемещения может быть установлен датчик скорости, вырабатывающий сигнал, пропорциональный скорости движения плиты 7. Сигнал подается на интегрирующее устройство (не показано) и после него на .выход датчика ускорения 10.
Повышение точности воспроизведения контрольного сигнала по фазе на низких частотах дает возможность проводить сейсморазведочные работы в районах с глубоким залеганием определяющих горизонтов и сложными геологическими условиями, т.е. там, где требуется работа в низкочастотном диапазоне.
Формула изобретения
Система управления вибрационным источником сейсмических сигналов, содержащая задающий генератор, блок управления,х блок фазовой коррекции, установленные на массе статической додгрузки, и датчик ускорегшя, смойтированный на опорной плите, ВЕЯХОД которого связан с входом блока фазовой коррекции, отличающаяс я тем, что, с целью повышения точности воспроизведения контрольного сигнала в области.низких частот, между массой статической подгрузки и опорной плитой установлен датчик перемещения, выход которого соединен с выходом датчика ускорения.
Источники информации, принятые во внимание при экспертизе
1.Патент США 3208545, кл. 181-5, опублик. 1965.
2.Патент США , кл. 181-5, опублик. 1974.
3.Патент США 3854118,
кл. 340-17, опувлик. 1974 (прототип)
| название | год | авторы | номер документа |
|---|---|---|---|
| Сейсмический вибратор | 1981 |
|
SU1010582A1 |
| Устройство управления вибрационным источником сейсмических сигналов | 1977 |
|
SU661460A1 |
| СЕЙСМИЧЕСКИЙ ВИБРАТОР | 2001 |
|
RU2204846C1 |
| СЕЙСМИЧЕСКИЙ ВИБРАТОР, УПРАВЛЯЕМЫЙ С ПРЯМЫМ ОБНАРУЖЕНИЕМ ПЕРЕМЕЩЕНИЯ ПЛИТЫ ОСНОВАНИЯ | 2010 |
|
RU2503976C2 |
| Вибрационный источник сейсмических сигналов | 1985 |
|
SU1277037A1 |
| Устройство для управления сейсмическим вибратором | 1982 |
|
SU1084762A1 |
| Вибрационный источник сейсмических сигналов | 1981 |
|
SU949582A1 |
| Сейсмический вибратор | 1984 |
|
SU1236399A1 |
| Сейсмический вибратор | 1985 |
|
SU1277036A1 |
| СПОСОБ ВИБРАЦИОННОЙ СЕЙСМОРАЗВЕДКИ | 2014 |
|
RU2570587C1 |
т
