(54) УСТРОЙСТВО ДЛЯ ПОИСКА НЕИСПРАВНОГО ЛОГИЧЕСКОГО МОДУЛЯ в ДИСКРЕТНОЙ СИСТЕМЕ УПРАВЛЕНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ТЕХНИЧЕСКОГО КОНТРОЛЯ И ДИАГНОСТИРОВАНИЯ БОРТОВЫХ СИСТЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА С ПОДДЕРЖКОЙ ПРИНЯТИЯ РЕШЕНИЙ И КОМПЛЕКС КОНТРОЛЬНО-ПРОВЕРОЧНОЙ АППАРАТУРЫ С ИНТЕЛЛЕКТУАЛЬНОЙ СИСТЕМОЙ ПОДДЕРЖКИ ПРИНЯТИЯ РЕШЕНИЙ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2557771C1 |
| ПЕРЕНОСНОЙ ПРОГРАММНО-ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2007 |
|
RU2363975C2 |
| СИСТЕМА УПРАВЛЕНИЯ И ДИАГНОСТИКИ ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2104883C1 |
| Отказоустойчивая система управления газоперекачивающим агрегатом | 1988 |
|
SU1629580A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ И ДИАГНОСТИКИ НЕИСПРАВНОСТИ ПРИБОРОВ | 1994 |
|
RU2087409C1 |
| ИНФОРМАЦИОННО-УПРАВЛЯЮЩИЙ КОМПЛЕКС АВТОМАТИЗИРОВАННОЙ СИСТЕМЫ УПРАВЛЕНИЯ ПОДГОТОВКОЙ ДВИГАТЕЛЬНЫХ УСТАНОВОК И ТЕХНОЛОГИЧЕСКИМ ОБОРУДОВАНИЕМ РАКЕТ КОСМИЧЕСКОГО НАЗНАЧЕНИЯ НА ТЕХНИЧЕСКОМ И СТАРТОВОМ КОМПЛЕКСАХ | 2015 |
|
RU2604362C1 |
| Устройство для управления процессом контактной точечной сварки | 1978 |
|
SU737159A1 |
| Система регулирования газоперекачивающих агрегатов | 1984 |
|
SU1249199A1 |
| Устройство для обучения операторов | 1989 |
|
SU1709372A1 |
| КОМПЛЕКС ДЛЯ ПРОВЕРКИ БОРТОВЫХ СИСТЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2001 |
|
RU2205441C1 |
1
Изобретение относится к автоматике и вычислительной технике и может быть использовано при поиске места неисправности в функционирующей дискретной системе управления и, в частности, в судовой автоматике.
Известно устройство автоматического контроля, обеспечивающее подачу на объект диагностирования совокупности электрических стимулов-воздействий, а также измерение и сигнализацию значений выходных параметров объекта 1.
Однако для эффективного поиска места неисправности в дискретной системе управления (например в судовой автоматике), когда происходит отказ на некотором режиме ее работы, необходимо обеспечить возможность проанализировать значения сигналов практически во всех внутренних точках струк туры системы, т.е. необходим их вывод на специальное многоконтактное устройство для стыковки с устройством автоматического контроля, что обычно бывает трудно осуществимо. Кроме того, известное устройство автоконтроля (будучи универсальным и автономным), оказывается сложным и громоздким; оно не является переносным, что
бывает необходимо при обслуживании, например, систем судовой автоматики, территориально расположенных в различных местах судна.
Многие дискретные системы управления построены из логических элементов (модулей), каждый из которых имеет индивидуальный разъем (штепсель) для подключения к блоку системы. Наличие таких разъемов позволяет осуществлять последовательное подключение устройства контроля и сиг0нализации к выводам элементов, если режим работы всей системы позволяет отключать элемент, сигналы на входах которого анализируются, от блока системы.
Наиболее близким техническим решением к изобретению вляется переносный пульт контроля сигналов модуля системы, который содержит блок связи, соединенный через коммутатор контрольных точек с первой группой входов блока усилителей-преобразователей, вторая группа входов которого через блок сопряжения модуля подключена к выходам выделенного логического модуля системы управления, а выходы - ко входам блока сигнализации уровней, преобразователь питающих напряжений, подключенный ко входам питания блока усилителей - преобразователей, и блок управления, соединенный с управляющим входом коммутатора контрольных точек 2.
Данный пульт обладает недостатками, ограничивающими его использование. Во-первых, в нем не предусмотрена возможность измерения аналоговых сигналов.на входах и выходах модуля, в то время как для высокой достоверности контроля и разрещающей способности поиска места неисправностей контроля только логических уровней сигналов «О и «1 недостаточно. Кроме того, измерению подчас подлежат такие параметры, как, например, ток в выходной цепи некоторого модуля-усилителя или сопротивление во входной или выходной цепи модуля. В этих случаях измерительный орган должен подключаться не параллельно к соответствующему выводу модуля, работающего в системе (так подсоединяются сигнализаторы уровней логических сигналов), а последовательно «врезаться в цепь связи вывода модуля с соответствующей точкой системы управления. Такая возможность в блоках связи и сопряжения модуля пульта прототипа не реализована.
Во-вторых, после перестановки некоторого модуля из системы управления в пульт зачастую нарушается исходный режим работы системы и тем самым может измениться картина распределения сигналов в точках ее структуры. Последнее затрудняет или даже исключает возможность достоверного поиска места неисправности. Для восстановления исходной картины необходимо на систему управления подать определенные воздействия, причем это часто трудно или невозможно сделать с помощью подачи воздействий на штатные входы системы управления (например, с помощью органов управления). Однако можно легко восстановить исходный режим работы системы управления подачей сигналов воздействий в ее внутренние точки. Это же является необходимым при реализации эффективной программы поиска места неисправности, когда сигналы в отказавщей системе нужно анализировать, не только на одном ее режиме, на котором зафиксирован отказ, а последовательно в нескольких режимах, в которые систему необходимо быстро и легко переводить. Указанная возможность подачи воздействий во внутренние точки объекта в пульте также отсутствует.
В-третьих, блок преобразователя питающих напряжений, встроенный в пульт и по существу являющийся автономным блоком питания, утяжеляет пульт, что снижает оперативность его использования.
Цель изобретения - расщиречие функциональных возможностей, пг.ыщение достоверности и оперативности поиска неисправного модуля.
Поставленная цель достигается тем, что в устройство для поиска неисправного логического модуля в дискретной системе управления, выполненной в виде наборного поля с установленными на нем логическими модулями, содержащее последовательно соединенные блок связи, коммутатор контрольных точек, блок усилителей-преобразователей и блок сигнализации уровней, причем управляющий вход коммутатора контрольных точек соединен с выходом блока управления, второй вход блока усилителей-преобразователей через блок сопряжения модуля подключен к выходам выделенного логического модуля, а вход питания - к первому выходу прео.0разователя питающих напряжений, введены последовательно соединенные коммутатор режимов проверки, коммутатор аналоговых сигналов и блок измерения параметров аналоговых сигналов, а также блок эталонных сигналов, коммутатор сигналов воздействий и переключатель режимов питания, выход которого соединен со входом преобразователя питающих напряжений, первый вход - со вторым выходом коммутатора режимов проверки, второй входсо вторым выходом коммутат )ра контрольных точек, а управляющий вход - с выходом блока управления и управляющими входами коммутатора сигналов воздействий,блока измерения параметров аналоговых сигналов, коммутатора аналоговых сигналов и коммутатора режимов проверки, связанного с блоком связи и блоком сопряжения модуля, вход коммутатора сигналов воздействий через блок эталонных сигналов подключен ко второму выходу преобразователя питающих напряжений, а выход - ко второму входу блока усилителей-преобразователей.
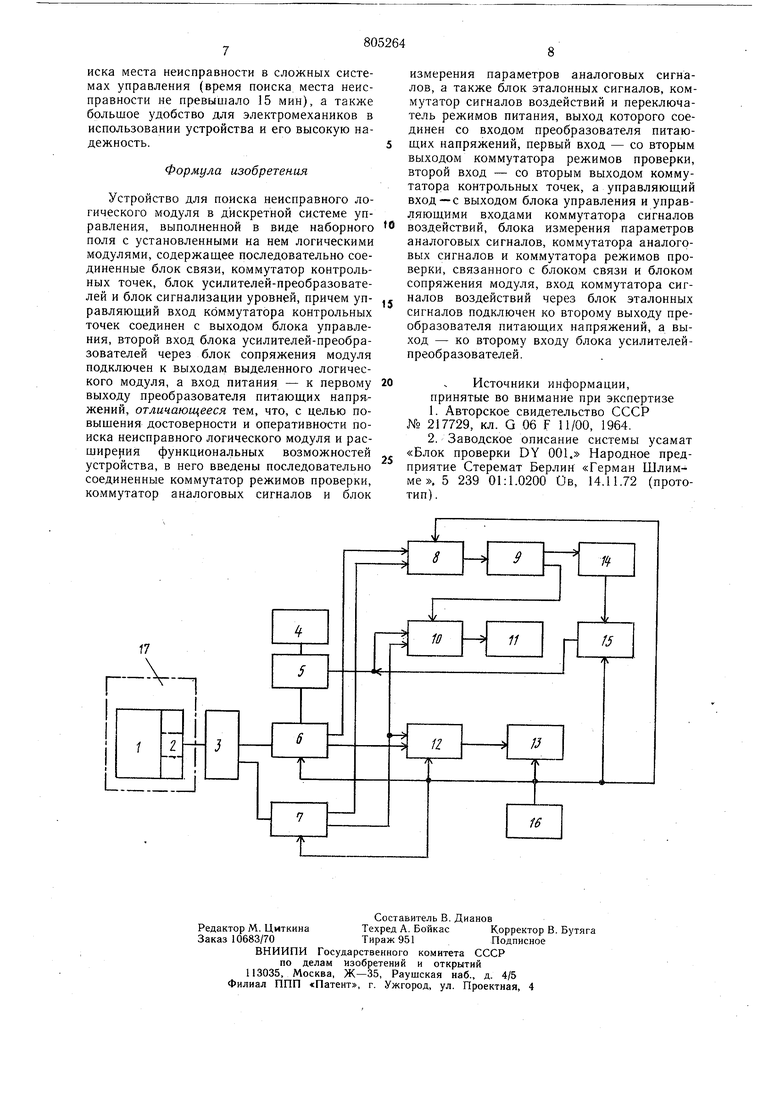
На чертеже представлена блок-схема устройства.
0 Оно содержит логические модули 1 системы управления, наборное поле 2, блок 3 связи, выделенный логический модуль 4, блок 5 сопряжения модуля, коммутатор 6 режимов проверки, коммутатор 7 контрольных точек, переключатель 8 режимов пита5 ния, преобразователь 9 питающих напряжений, блок 10 усилителей-преобразователей, блок 11 сигнализации уровней, коммутатор 12 аналоговых сигналов, блок 13 измерения параметров аналоговых сигналов, блок 14 эталонных сигналов, коммутатор 15 сигналов воздействий, блок 16 управления, дискретная система 17 управления (объект диагностирования).
Устройство, осуществляющее поиск места неисправности в функционирующей дискретной системе управления, каждый модуль которой имеет индивидуальный разъем (щтепсель), работает следующим образом.
Для каждого отказа или группы отказов системы 17 заранее составляется программа поиска места неисправности, предусматривающая последовательный анализ сигналов во внутренних точках системы, сопоставление их с известными значениями в исправной системе 17, а также подачу определенных сигналов-воздействий «О или «1 в некоторые внутренние точки системы управления. Анализ сигналов предполагает как определение и сигнализацию его логического уровня «О или «1, так и аналоговое измерение параметра сигнала (напряжения, тока или сопротивления). В общем случае последовательность анализируемых или задаваемых сигналов определяется результатами анализа и сопоставления с исправными сигналами в ранее контролируемых точках. Подача воздействия в некоторую точку системы 17 осуществляется либо при удаленном из объекта на это время модуле, выходом которого является рассматриваемая точка, либо при наличии этого модуля в тех случаях, когда его собственный выходной сигнал и схемная реализация модуля позволяют подачу на выход модуля противоположного сигнала извне (например, подача извне сигнала земли «О на выход усилителя с закрытым выходным транзистором, т.е. имеющего выходной сигнал «1).
При отказе в системе 17 в соответствии с программой поиска из нее удаляются и устанавливаются в блок 5 один или несколько модулей 4, а блок 3 подсоединяется к освободившимся разъемам системы 17. Кроме того, блок 3 обеспечивает подсоединение устройства к контрольным точкам системы и к ее шинам питания.
В режиме анализа сигналов, задаваемом блоком 16 , коммутатор 6 обеспечивает соединение всех выводов модуля (модулей) 4 с соответствующими точками системы 17. Сигналы со всех выводов модуля через блок 5, а сигналы с выбранных контрольных точек системы 17 через коммутатор 7 усиливаются и преобразуются в блоке 10, а в блоке. 11 осуществляется сигнализация логического уровня «О или «1 этих сигналов.
Анализируемые контрольные точки выбираются с помощью коммутатора 7 по сигналам из блока 16. Сигнализаторы уровней сигналов на выводах модуля имеют механические маски; сигнализаторы анализируеMbtx по программе поиска выводов модуля демаскируются вручную.
Сигналы выводов модуля или контрольных точек, требующие измерения их уровня, выбираются коммутатором 12 и измеряются соответствующими измерителями в блоке 13 по сигналам из блока 16. При замере напряжений коммутатор 6 обеспечивает параллельное подключение измерительных органов с блока 13 к выводам модуля-. При необходимости измерения тока или сопротивления во входной или выходной цепи рассматриваемого модуля (этот режим также задается блоком 16) коммутатор 6 обеспечивает последовательное включение измерительног.0 органа блока 13 в цепь связи вывода модуля с соответствующей точкой системы 17.
Сигнализируемые или измеренные значения сравниваются с их значениями в исправной сисФеме 17, которые указываются в программе поиска. В результате определяется содержание следующего щага проверки либо делается вывод о месте неисправности в системе 17.
При необходимости, предусмотренной в программе проверки, подать определенное воздействие в некоторые точки системы 17 блок 15 подключает по сигналу .из блока 16 желаемые точки системы управления к блоку 14, в котором задается уровень подаваемых логических воздействий «О и «1. При этом в случае необходимости соответствующий модуль 4 отсоединяется от, блока 5 (вынимается из своего разъема на устройстве) .
Аналоговые проверки и подача воздействий осуществляется при перестановке из системы 17 в устройство других ее модулей или при подключении других контрольных точек системы 17 в соответствии с программой поиска неисправности. В результате работы устройства по этой программе место неисправности указывается с точностью до входа или выхода неисправного модуля или с точностью до конкретной связи в системе 17.
Преобразователь 9 для блоков 10 и 14 по существу является набором соответствующих щин питания, напряжение на которые поступает через переключатель 8, либо с соответствующих выводов выбранного логического модуля (если модуль является активным элементом), либо со специальных контрольных точек системы через коммутатор 7. Таким образом, предлагаемое устройство по существу не содержит автономного блока питания, как пульт, что существенно облегчает устройство и позволяет сделать его переносным.
Необходимо подчеркнуть, что оператор, производящий поиск места неисправности, находится территориально вместе с переносным устройством поиска рядом с отказавщими блоками дискретной системы управления, а управлять ею (переводить ее в различные режимы для поиска места неисправности) может не обращаться к центральному пульту управления всеми системами, который, как правило, удален от блоков системы.
Предлагаемое устройство, применяемое для поиска места неисправности в блоках управления судовой автоматики, изготовлено и испытано в условиях промысла супертраулеров. Результаты испытаний показали высокую эффективность и простоту по
