(5+) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ КОПИРУЩИМ МАНИПУЛЯТОРОМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления копирующим манипулятором | 1982 |
|
SU1030769A1 |
| Устройство для управления копирующим манипулятором | 1981 |
|
SU987573A1 |
| Устройство для управления электромеханическим копирующим манипулятором | 1980 |
|
SU928297A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ РОБОТА | 2002 |
|
RU2230349C2 |
| Следящий электропривод с компенсацией люфта | 1981 |
|
SU981929A1 |
| Устройство для управления копирующим манипулятором | 1987 |
|
SU1450999A1 |
| Устройство для регулирования расхода | 1986 |
|
SU1377832A1 |
| Копировальное следящее устройство для управления станком | 1982 |
|
SU1104470A1 |
| Устройство для управления сборочным манипулятором | 1981 |
|
SU993198A1 |
| Устройство для управления приводом манипулятора | 1990 |
|
SU1821356A1 |
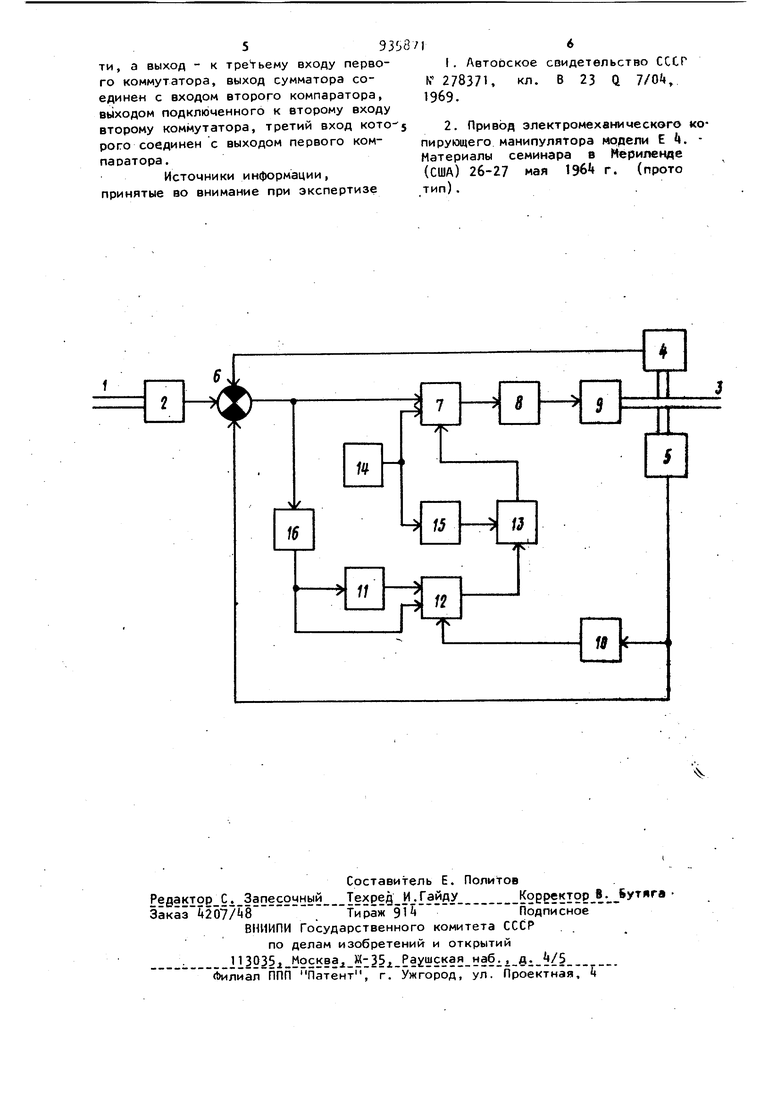
Изобретение относится к роботе технике и может быть использовано пр создании универсальных копирующих ма нипуляторов . Известно устройство для управлени копирующим манипулятором, содержащее в каждом суставе задающего и исполнительного органа датчики положения, да чик момента, сумматор, исполнительный механизм и привод 1. Однако оно не обеспечивает некопирующего режима работы. Наиболее близким техническим решением к изобретению является устройство, содержащее последовательно соединенные первый датчик положения, сумматор, первый коммутатор, вторым входом подключенный к выходу задатчика скорости, усилитель и двигатель, вал которого связан с датчиком скорости и вторым датчиком положения, выходом подключенным ко второму входу сумматора, третий вход которого соединен с выходом датчика скорости С. Недостатком этого устройства является то, что при обратном переходе из режима непрерывного вращения в режим копирования при замыкании цепи обратной связи по углу поворота кисти происходит отработка имеющего в этот момент место рассогласования, величина и з.нак которого носят случайный характер. Это создаст определенные неудобства в работе и может привести к заклиниванию или поломке рабочего инструмента. Цель изобретения - повышение надежности устройства. СущностЬч изобретения заключается в том, что устройство дополнительно содержит нуль-орган, первый компаратор и последовательно соединенные второй компаратор, инвертор, второй коммутатор .и триггер, второй вход которого подключен через нуль-орган к выходу задатчика скорости, а выход к третьему входу первого коммутатора, выход сумматора соединен со входом второго компаратора, выходом подключенного ко бторому входу второго ком мутатора, третий вход которого соеди нен с выходом первого компаратора. На чертеже представлена функциональная схема устройства. Схема содержит задающий орган 1, первый датчик 2 положения, исполнительный орган 3. второй датчик k положения, датчик 5 скорости, сумматор 6, первый коммутатор 7, усилитель 8, двигатель 9, первый компаратор 10, инвертор 11, второй коммутатор 12, триггер 13 задатчик Н скорости, нуль-орган 15, второй компа{эатор 16. Устройство работает следующим образом. В исходном состоянии сигнал на вы ходе задатчика 1 скорости отсутству ет, а триггер 13 при подаче питания устанавливается в состояние, обеспечивающее такое положение первого ком мутатора 7, при котором выход суммато ра 6 соединен со входом усилителя 8. Таким образом, главная обратная связ следящей системы замкнута, и при вра щении задающего органа 1 сигнал рассогласования с выхода сумматора 6 че peai коммутатор 7 и усилитель 8 посту пает на двигатель 9. Вращение, передаваемое двигателем 9 исполнительному органу 3, направлено на устранени имеющегося рассогласования. Устройст во работает в режиме копирования. При появлении сигнала на выходе задатчика 1 скорости происходит изменение сигнала на выходе нуль-орга;на 15, которое переводит триггер 13 по установочному входу в состояние, обеспечивающее переключение коммутатора 7 в такое положение, при котором на вход усилителя 8 подается сиг нал с задатчика скорости, а главная обратная связь при этом размыкается. Устройство переходит в режим непрерывного вращения. Перевод устройства в режим копиро вания производится следующим образом При снятии выходного сигнала с задатчика скорости происходит изменение сигнала на установочном входе триггера 13, однако переход последнего в другое состояние может произойти тблько при поступлении импульса на его тактовый вход. Формирование и передача этого тактового импульса осуществляется компаратора ми 10, 16, инвертором Н и вторым коммутатором 12. На вход компарато- ра 16 поступает сигнал рассогласования с выхода сумматора 6. В момент, когда величина рассогласования, проходя через ноль, меняет свой знак на противоположный, на выходе компаратора 16 появляется перепад напряжений, который непосредственно и через инвертор 11 подается на входы коммутатора 12, Компаратор 10, соединенный с выходдом датчика 5 скорости, управляет поломением коммутатора 12 так, чтобы независимо от направления вращения исполнительного органа 3 на тактовый вход триггера 13 поступил первый же положительный перепад напряжений, соответствующий моменту истинного нуля рассогласования на выходе сумматора 6. При этом триггер 13 Переходит в состояние,обеспечивающее переключение коммутатора 7- Происходит замыкание главной обратной связи, и разрывается связь между задатчиком 14 скорости и усилителем 8. Таким образом, перевод устройства из режима непрерывного вращения в режим копирования производительно только в тот момент, когда исполнительный орган 3 по инерции достигает согласованного положения с задающим органом 1 а в случае нахождения исполнительного органа 3 на упоре - после поворота оператором задающего органа 1 до согласования. Применение изобретения позволяет повысить надежность устройства. Формула изобретения Устройство для управления копирующим манипулятором, содержащее последовательно соединенные первый дат-: чик положения, сумматор, первый коммутатор, вторым входом подключенный к выходу задатчика скорости, усилитель и двигатель, вал которого связан с датчиком скорости и вторым датчиком положения, выходом подключенным к второму входу сумматора, третий вход которого соединён с выходом датчика скорости,отличающееся тем, что, с целью повышения надежности устройства, содержит нуль-орган, первый компаратор и последовательно соединенные второй компаратор, инвертор, второй коммутатор и триггер, второй вход которого подключен через нуль-орган к выходу задатчика скороети, а выход - к третьему входу первого коммутатора, выход сумматора соединен с входом второго компаратора, выходом подключенного к второму входу второму коммутатора, третий вход KOTOW рого соединен с выходом первого компаратора.
Источники информации, принятые во внимание при экспертизе
