(54) СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ОБЪЕКТАМИ

| название | год | авторы | номер документа |
|---|---|---|---|
| Интегрирующее устройство с анало-гОВОй пАМяТью | 1976 |
|
SU842844A1 |
| Источник импульсного магнитного поля | 1988 |
|
SU1529154A1 |
| Устройство для управления контуромРЕгулиРОВАНия | 1978 |
|
SU807209A1 |
| Цифровая следящая система | 1979 |
|
SU924663A1 |
| Устройство для динамической балансировки роторов лучом лазера | 1987 |
|
SU1434301A1 |
| Устройство для измерения полосы блокирования радиоприемников | 1983 |
|
SU1177922A1 |
| Устройство для дистанционного измерения температуры | 1984 |
|
SU1201691A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КРИТИЧЕСКОЙ ЧАСТОТЫ СЛИЯНИЯ СВЕТОВЫХ МЕЛЬКАНИЙ | 2001 |
|
RU2204931C2 |
| Устройство для измерения отношения сигнал/помеха импульсных сигналов | 1987 |
|
SU1494232A1 |
| Устройство для контроля параметров ферромагнитных изделий | 1985 |
|
SU1298626A1 |
1
Изобретение относится к автоматическому управлению и предназначенс для использования в- системах непосредственного цифрового управления (НЦУ) технологическими процессами, например на предприятиях химической промьашленнЬсти.
Данная система может быть использована в автоматизированных системах, в которых одна управляющая вычислительная машина (УВМ) заменяет все управляющие устройства классического типа. Получая от датчиков кбмплекй информации о величинах, соответствующих различным параметрам производственного процесса (давлению, температуре, уровню и т.д.), УВМ определяет величины рассогласований между необходимыми и действительными значениями каждого параметра и, в зависимости от величины этих рассогласований вырабатывает, управляющие воздействия, поступакицие на входы исполнительных механизмов.
Известны системы, содержащие устройства, которые включают пульт.оператора, УВМ, коммутаторы, запомингиощие устройства, исполнительные меха.HH3NH I и .
Основным недостатком вышеуказанных устройств является их недостаточно высокая надежность из-за отсутствия контроля за выходным сигналом, поступающим из УВМ.
Наиболее близкой по технической сущности к предлагаемой является система автоматического управления (с прямым цифровым управлением), содержащая последовательно соединенные вычислитель, ключ и аналоговое запоминающее устройство, выход которого через интегрирующий блок соединен с исполнительным механизмом 12J.
Недостатком такой системы является, то что существуют ситуации, когда вычислитель может обнаружить свою ошибку ЛИШЬ после выдачи управляющего воздействия, например выдача управляющего воздействия не по своему каналу регулирования, что приводит к нарушениям технологического процесса и к авариям.
5 Кроме того, для обнаружения многих ошибок в работе УВМ (например етиибка адресации, зацикливание и т.д.), приводящих к нарушению нормального режима работы системы НЦУ,
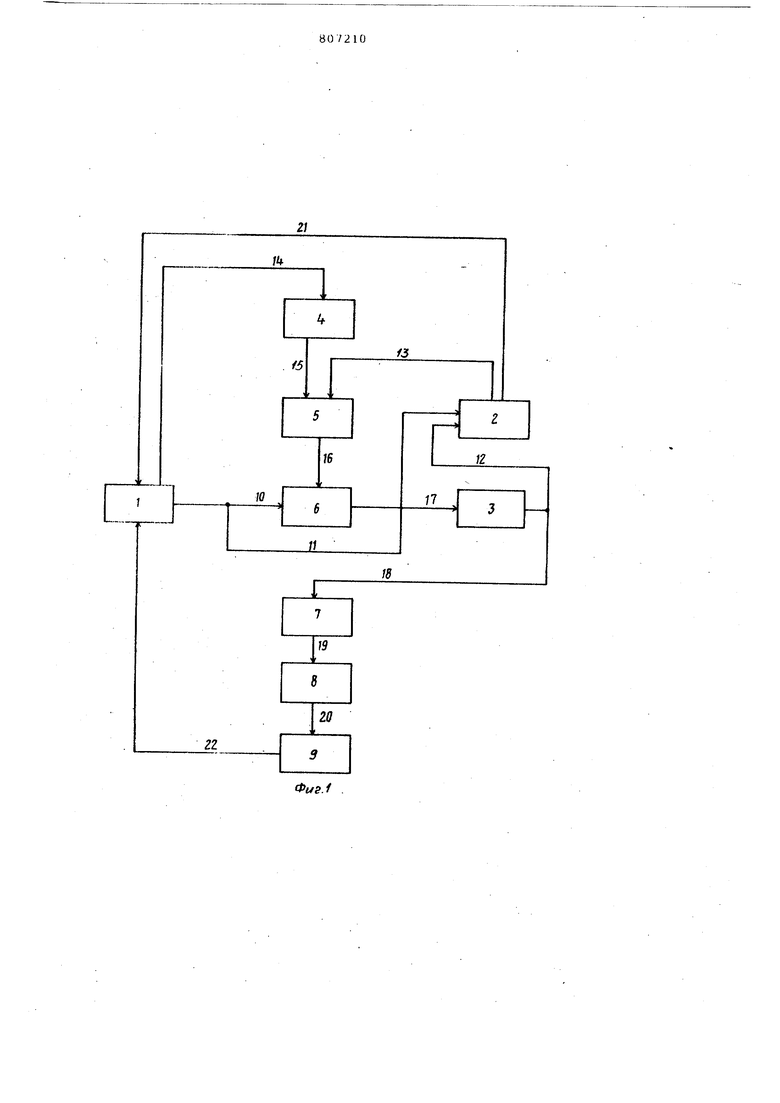
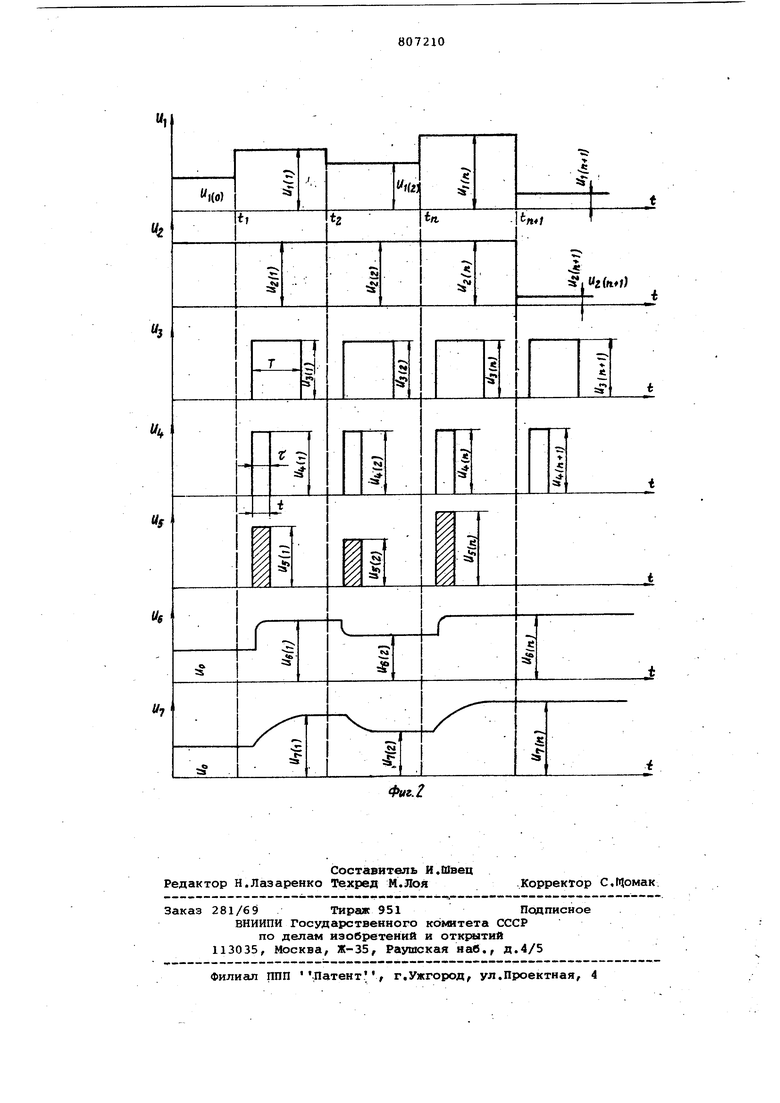
0 требуется затратить большой объем оперативной памяти и машинного времени, что экономически неэффективно Цель изобретения - повьпиение надежности, которая достигается тем, что в систему введены элемент И, ждущий мультивибратор и пороговый блок сравнения, первый вход которого соединен с выходом аналогового запоминающего устройства, второй вход - с аналоговым выходом вычислителя,, первый выход порогового блока сравнения подключен через элемент И ко второму входу ключа, а второй выход - ко второму входу вычислителя второй выход которого через ждущий мультивибратор соединен со вторым входом элемента И, На фиг.1 изображена структурная схема системы автоматического управления; на фиг.2 - временная диаграмма работы системы. Система содержит вычислитель 1, пороговый блок 2 сравнения, аналоговое запоминающее устройство 3, ждущий мультивибратор 4, элемент И 5, ключ 6 интегрирующий блок 7, исполни тельный механизм Н, объект 9 управЛенин цепи 10-22 связи. На временной диаграмме работы системы (фиг.2) обозначено по оси ординат и - аналоговый выход вычислителя; и2 - выход порогового бло ка сравнения; U-, - дискретный выход вычислителя; Од - выход ждущего мул тивибратора 4; иJ - выход ключа 6; и - выход аналогового запоминающег устройства 3.; U-j- - выход интегрирую щего блока 7, а по оси абсцисс-время t. Предлагаемая система работает следующим образом. В режиме НЦУ вычислитель 1, обра батывая информацию, поступающую по цепи 22 от датчиков, контролирующих состояние объекта 9 управления, рас считывает и выдает в моменты времени t, t ,. ..,tn управляющие воздейст вия в виде аналоговых сигналов U() U(2j ,., U(n) /которые поступают н вход порогового блока сравнения по цепи 11. На другой вход этого блока поступает аналоговый сигнал по цепи 12 устройства 3,хранящего управляющие воздействия, рассчитанные вычис лителем 1 в предыдущем цикле. Алгоритм работы вычислителя 1, работающ в режиме НЦУ, построен таким образо что абсолютная величина относительного изменения управляющих воздеист ВИЙ, поступающих на вход исполнител ного механизма, рассчитанных вычисл телем 1 в двух последовательных цик лах, не должна превышать определенной величины, которая выбирается из условий технологии, т.е. U,li)-U,(/i-) U.U-i) где U((i) - управляющее воздействие, расчитанные УВМ в текущем цикле; и (i-1)- управляющее воздействие, рассчитанное УВМ в предыдущем цикле; 8 - абсолютная величина относительного изменения управляющего воздействия. Блок 2 настраивается на величину S и, в зависимости от комбинации этих сигналов на своих входах, управляет работой элемента 5 по цепи 13. Предположим,что в момент времени t, вычислитель рассчитал и выдал новое управляющее воздействие U() , Блок 2, анализируя состояние сигналов на своих входах, устанавливает, что S лежит в заданных пределах, в .результате чего разрешающий потенциал U2() по цепи 13 поступает на один из входов элемент-а И 5. Через время ut, необходимое для анализа пришедшего сигнала, вычислитель 1 выдает командный сигнал U-j() длительностью Т, формируемый с учетом состояния переменных технологического процесса и других, предусмотренных программой условий, определяег-/ых алгоритмом управления. Этот командный сигнал по цепи 14 поступает на вход мультивибратора 4, который вырабатывает импульс Од (А) длительностью 1 , проступающий на другой вход элемента И 5 по цепи 15. Элемент И 5 при наличии двух разрешающих сигналов на своих входах (от мультивибратора 5 и блока-2) срабатывает и по цепи 16 открывает ключ 6, ,в результате чего новое управляющее воздействие (/() / равное J() по цепи 17 поступает на вход аналогового запоминающего устройства 3, на выходе которого устанавливается значение , равное U ((н) , которое по цепи 18 поступает на вход интегрирующего блока 7 и сглаженное блоком 7 значение управляющего воздействия по цепи 19 воздействует Механизма 8, управляющего объектом 9 управления по цепи 20. После прекращения действия импульса, выработанного ждущим мультивибратором 5, т.е. через время элемент И 5 закрывает ключ 6 и вход устройства 3 отключается от выхода, вычислителя 1, при этом аналоговое запоминающее устройство 3 сохраняет значение управляющего воздействия величиной и ,(/() г равное до момента времени t2. +ut, - т.е. до повторения вышеописанного цикла. Предположим, что вычислитель 1 функционировал нормально до момента времени t. , т.е. на выходе аналогового запоминающего устройства 3 значения управляющих воздействий имели вид П() ,U6(z), . .vU6(h)a на выходе интегрирующего блока 7 значения управляющих воздействий ) (2) (п)соответственно. В момент времени t. вычислитель 1 вьщает на выход управляющее воздействие величиной ,+ , а.блок 2, проанализировав соотношение сигналов и ) на своих входах, устанавливает, что соотнетиение имеет вид Ulfn-Ki) что свидетельствует о возникновении аварийной ситуации в работе вычисли теля 1, так как, согласно алгоритму управления, вычислитель 1 должен выполнять соотношение (1), В результате этого блок 2 вырабатывает запрещающий потенциал и((ц), поступа ющий на вход элемента И5 по цепи 13, препятствуя срабатыванию последнего даже при наличии командного дискретного сигнала запоминание, поступающего из вычислителя 1., Это не позволяет открыться ключу б, и ошибочное управляющее воздействие U(( не поступит на вход устрой ства 3, которое сохраняет запомнивше еся управляющее воздействие У(,(п) ное ид(„| , вплоть до перехода на резервные режиьФл работы. Одновременно с определением аварийной ситуации блок 2 по цепи 21 сигнализирует вычи лителю 1 о возникновении аварийной ситуации в его работе, на основании чего вычислитель 1, согласно заложен ному в него алгоритму управления, должен принять меры по.устранению ошибки. Использование предлагаемого изобретения позволя-ет уменьшить объем оперативной памяти, занимаемый программами самопроверки и повысить надежность функционирования системы НЦУ без применения резервного управляющего вычислительного.комплекса, повышая время нормального функционирования система НЦУ производства слоя ных удобрений в 1,2 раза. Формула изобретения Система автоматического управления технологическими объектами, содержащая последовательно соединенные вычис литель, ключ, .аналоговое запоминающее устройство, выход которого через интегрирующий блок соединен с исполнительным механизмом, отличающаяся тем, что, с целью повышения надежности работы, в систему введены элементы И, ждущий мультивибратор и пороговый блок сравнения, первый вход которого соединен с. выходом аналогового запоминающего устройства, второй вход - с ансшоговым выходом вычислителя, первьий выход порогового блока сравнения подключен через элемент И ко второму входу ключа, а второй выход - ко второму входу вычисли-: теля, второй выход которого через ждущий мультивибратор соединен со вторым входом элемента И. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 427535,- кл. G 05 В 15/02, 1974. 2.Патент Японии .№ 49-8672, кл. 541 7 G 05 В 15/00, опублик.1975.
22
