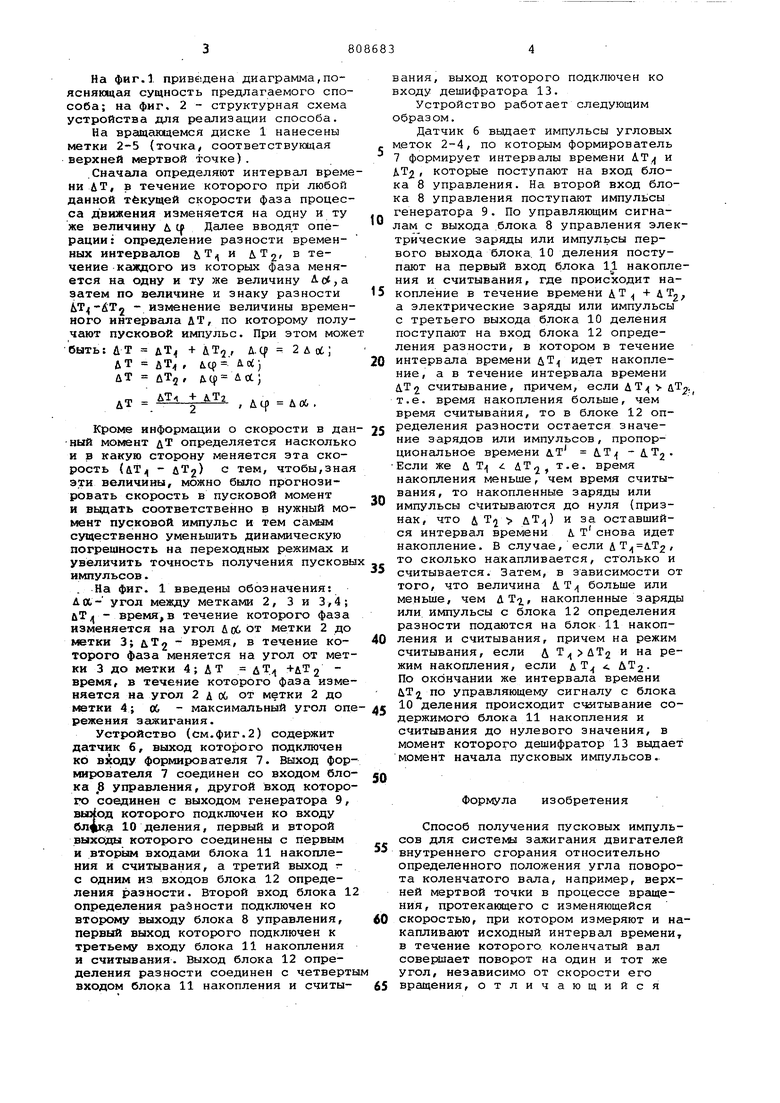
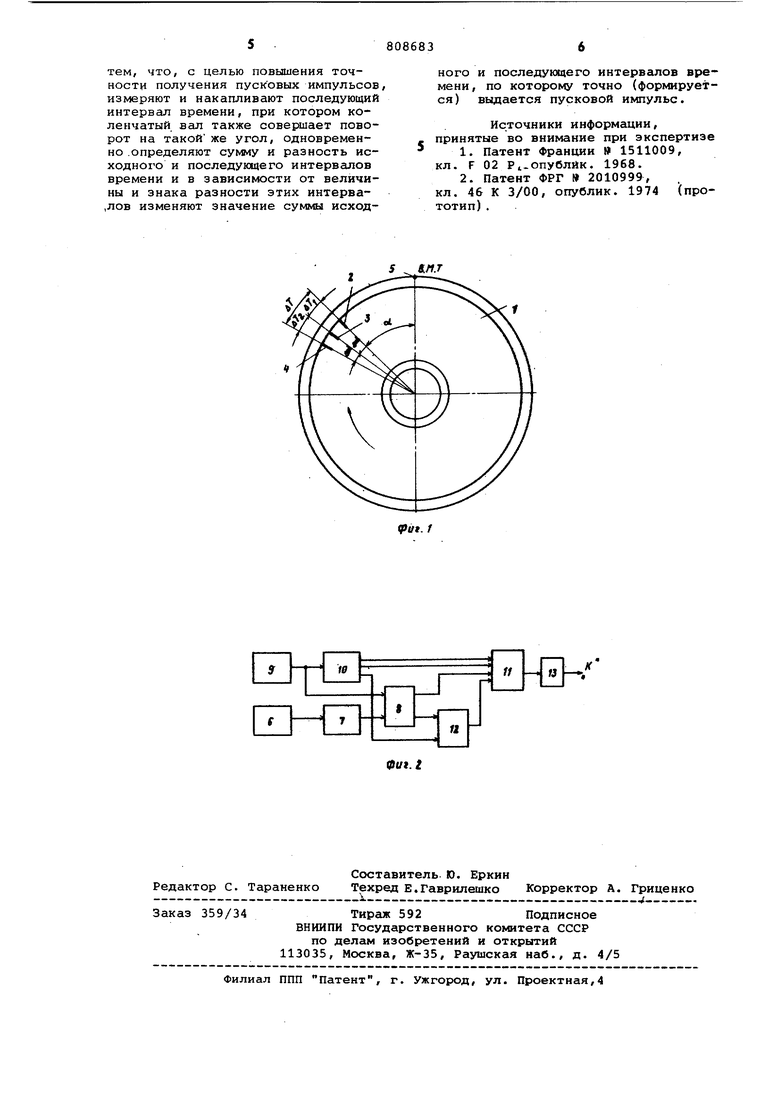
На фиг.1 приведена диаграмма,поясняющая сущность предлагаемого способа; на фиг, 2 - структурная схема устройства для реализации способа. На вращающемся диске 1 нанесены метки 2-5 (точка, соответствукщая верхней мертвой точке). Сначала определяют интервал време ни ДТ, в течение которого при любой данной текущей скорости фаза процесса движения изменяется на одну и ту же величину д cf Далее вводят oneрации: определение разности временных интервалов &Т и ATj, в течение -каждого из которых фаза меняется на одну и ту же величину А с, а затем по величине и знаку разности - изменение величины временного интервала ДТ, по которому получают пусковой импульс. При этом може быть: ДТ дТ -f ЛТ,2, А-Ср 2 Д ot; ДТ дТ , й.ц)- йс() дт йТ , дср йл J ДТ/1 + U.T2 , ДЦ) ДОС . Кроме информащии о скорости в дан ный момент дТ определяется насколько и в какую сторону меняется эта скорость (дТ - дТ2) с тем, чтобы,зная эти величины, можно было прогнозировать скорость в пусковой момент и вьадать соответственно в нужный момент пусковой импульс и тем самым существенно уменьшить динамическую погрешность на переходных режимах и увеличить точность получения пусковы импульсов. . На фиг. 1 введены обозначения; да- угол между метками 2, 3 и 3,4; дТ;| - время, в течение которого фаза изменяется на угол д ос, от метки 2 до метки 3; uTj время, в течение которого фаза меняется на угол от мет ки 3 до метки 4 ; Д Т д Т( +дТ 2 время, в течение которого фаза изме няется на угол 2 д (Х, от метки 2 до метки 4; Л - максимальный угол one режения згшигания. Устройство (см.фиг.2) содержит датчик б, выход которого подключен ко входу формирователя 7. Выход фор мирователя 7 соединен со входом бло ка j8 управления, другой вход которо го соединен с выходом генератора 9, которого подключен ко входу 10 деления, первый и второй выходы которого соединены с первым и вторым входами блока 11 накопления и считывания, а третий выход с одним из входов блока 12 определения разности. Второй вход блока 1 определения райности подключен ко второму выходу блока 8 управления, первый выход которого подключен к третьему входу блока 11 накопления и считывания. Выход блока 12 определения разности соединен с четверт входом блока 11 накопления и считыания, выход которого подключен ко ходу дешифратора 13. Устройство работает следующим образом. Датчик 6 выдает импульсы угловых меток 2-4, по которым формирователь 7 формирует интервалы времени ДТ, и ДТ, которые поступают на вход блока 8 управления. На второй вход блока 8 управления поступают импульсы генератора 9. По управляющим сигнаам с выхода блока 8 управления электрические заряды или импульсы первого выхода блока, 10 деления поступают на первый вход блока 11 накопления и считывания, где происходит накопление в течение времени ДТ + ATg, а электрические заряды или импульсы с третьего выхода блока 10 деления поступают на вход блока 12 определения разности, в котором в течение интервала времени йТ;( идет накопление, а в течение интервала времени дТ2 считывание, причем, если ДТ;( дТ т.е. время накопления больше, чем время считывания, то в блоке 12 определения разности остается значение зарядов или импульсов, пропорциональное времени д.т Т l T Если же ЛТ .е. время накопления меньше, чем время считывания, то накопленные заряды или импульсы считываются до нуля (признак, что i Т дТ) и за оставшийся интервал времени д тснова идет накопление. В случае, если д .Т2 , то сколько накапливается, столько и считывается. Затем, в зависимости от того, что величина ДТ больше или меньше, чем ДТ., накопленные заряды или импульсы с блока 12 определения разности подаются на блок 11 накопления и считывания, причем на режим считывания, если Л и на режим накопления, если дТ UT2. По окончании же интервала времени uTj по управляющему сигналу с блока 10 деления происходит считывание содержимогсэ блока 11 накопления и считывания до нулевого значения, в момент которого дешифратор 13 выдает момент начала пусковых импульсов. Формула изобретения Способ получения пусковых импульсов для системы зажигания двигателей внутреннего сгорания относительно определенного положения угла поворота коленчатого вала, например, верхней мертвой точки в процессе вращения, протекающего с изменяющейся скоростью, при котором измеряют и накапливают исходный интервал времени в течение которого коленчатый вал совершает поворот на один и тот же угол, независимо от скорости его вращения, отличающийся
тем, что, с целью повышения точности получения пусковых импульсов измеряют и накапливают последующий интервал времени, при котором коленчатый вал также совершает поворот на такой же угол, одновременно .определяют сумму и разность исходного и последующего интервалов времени и в зависимости от величины и знака разности этих интерва,лов изменяют значение суммы исходного и последующего интервалов времени, по которому точно (формируется ) выдается пусковой импульс.
Источники информации, принятые во внимание при экспертизе
1.Патент Франции 1511009, кл. F 02 Р -Опублйк. 1968.
2.Патент ФРГ 2010999,
кл. 46 К 3/00, опублик. 1974 (прототип) .
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для получения пусковыхиМпульСОВ | 1978 |
|
SU809529A1 |
| Устройство для получения пусковогоиМпульСА | 1978 |
|
SU809530A1 |
| Способ получения пусковых импульсовдля СиСТЕМ зАжигАНия | 1977 |
|
SU808682A1 |
| Способ определения нестационарной температуры газа или жидкости | 1983 |
|
SU1129499A1 |
| Способ измерения частоты | 1982 |
|
SU1093986A1 |
| Измеритель скорости изменения частоты | 1985 |
|
SU1288620A1 |
| Способ измерения сигналов низкого уровня | 1984 |
|
SU1241131A1 |
| Способ измерения ускорения | 1979 |
|
SU838588A1 |
| Способ контроля температур и тепловых деформаций металлорежущего станка и устройство для его осуществления | 1981 |
|
SU998092A1 |
| Способ автоматического выравнивания температур в группах из трех регенераторов | 1978 |
|
SU900106A1 |
5 «ЛГ
