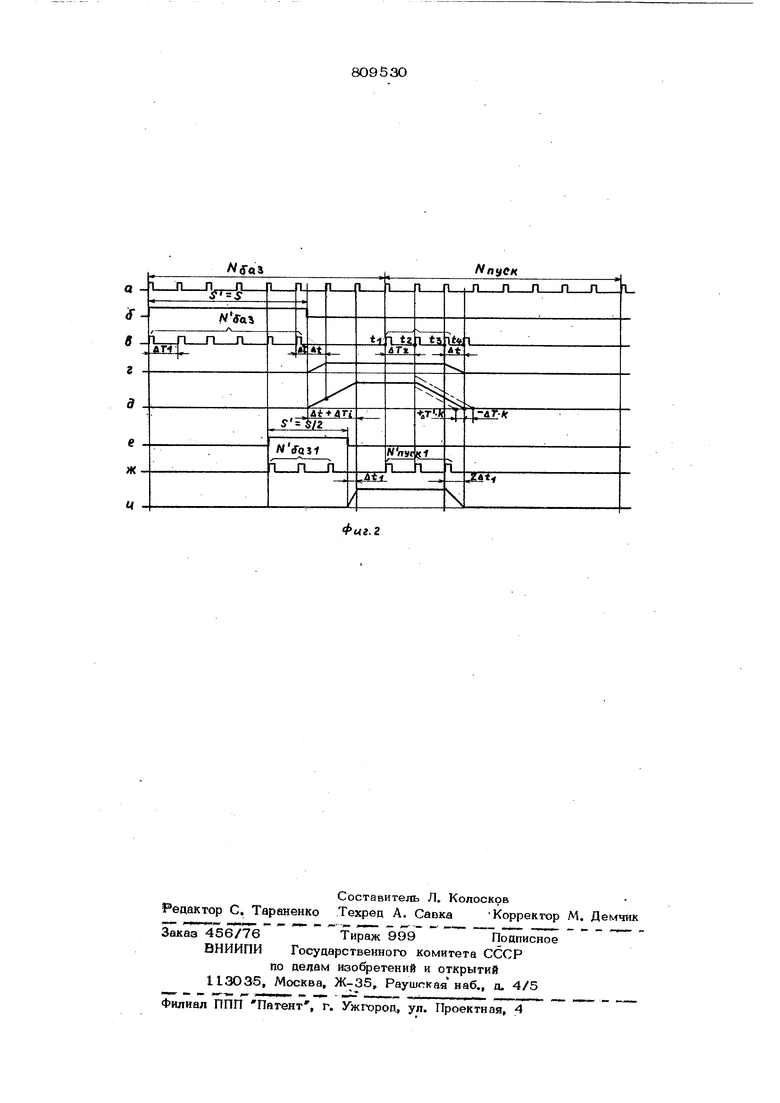
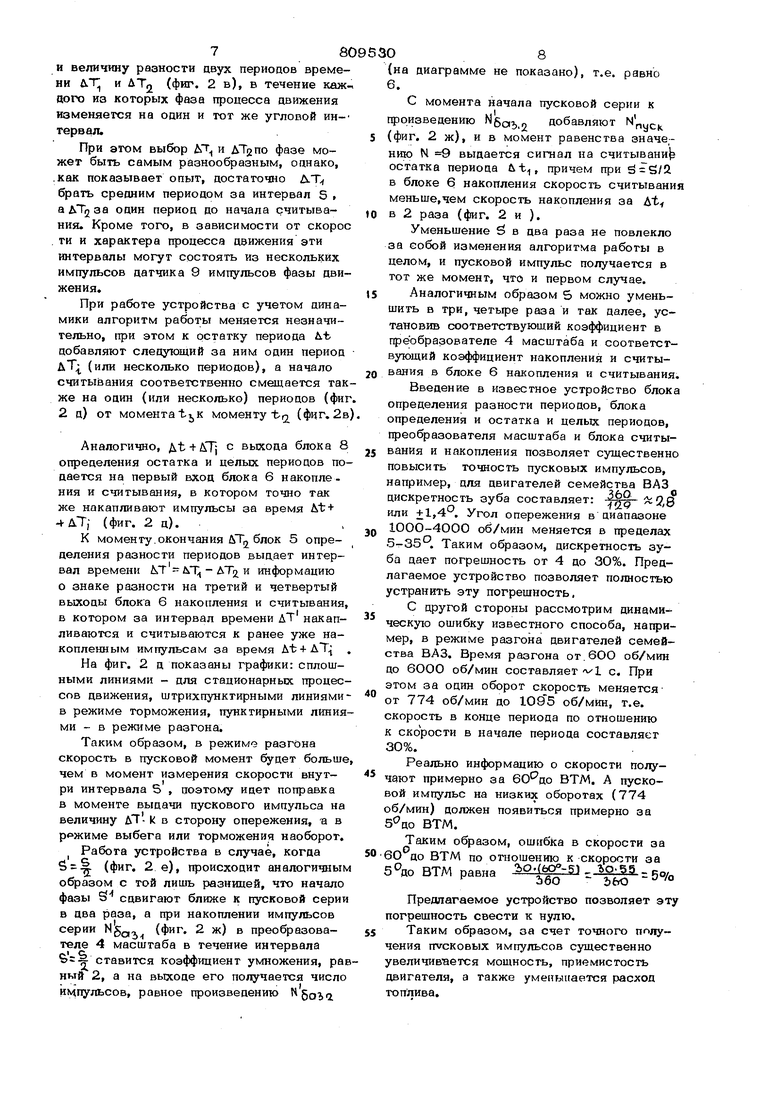
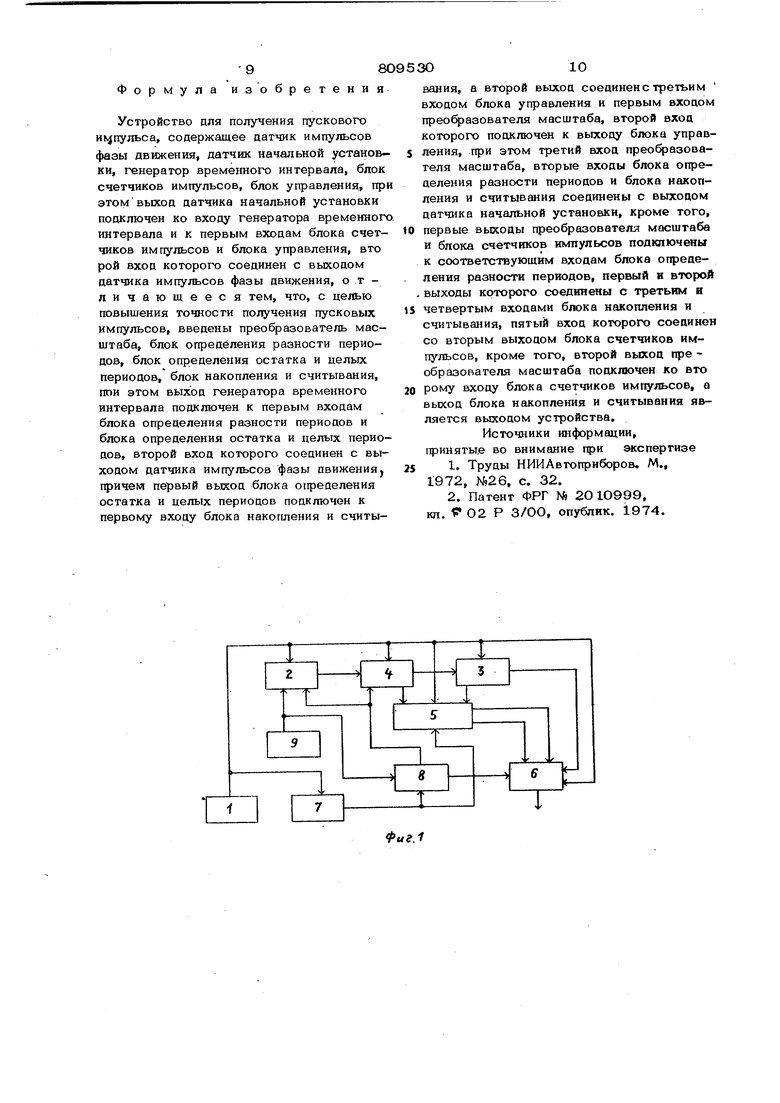
(54) УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ ПУСКОВОГО ИМПУЛЬСА этом выхоа генератора временного интервала подключен к первым входам блока определения разности периодов и блока определения остатка и целых периодов, второй вход которого соединен с выходом датчика импульсов фазы движения, причем первый выход блока определения остатка и целых периодов подключен к первому входу блока накопления и считывания, а второй выход соединен с третьим входом блока управления и первым входом преобразователя масштаба,. второй вход которого подключен к выходу блока управ ления, при этом третий вход преобразователя масштаба, вторые входы блока определения разности периодов и блока накопления и считывания соединены с выходом датчика начальной установки, кроме того, первые выходы преобразователя масштаба и блока счетчиков- импульсов подключены к соответствующим входам блока определения разности периодов, первый и второй выходы которого соединены с третьим и четвертым выходами блока накопления и считывания, пятый вход которого соедине со вторым выходом блока счетчиков импульсов, кроме того, выход преобразователя масштаба подключен ко второму вхо ду блока счетчиков импульсов, а выход блока накопления и считывания является выходом устройства. Введение отличительных блоков позволяет точно измерить не только целые периоды внутри интервала S , но и остаток периода в случае некратности, причем точность измерения остатка периода опре деляется только частотой генератора, т.е скорость внутри интервала S измеряется с высокой точностью. с другой стороны, -точное измерение информации о скорости за счет точного измерения остатка периода позволяет получить другой интервал S5/h ; где S - новый интервал времени; S - интервал времени в известном устройстве ; где N -число импульсов в пусковой серии. Уменьшение интервала времени S в п раз позволяет приблизить начало нового интервала S- в п раз ближе к началу пусковой серии, тем самым уменьшается динамическая погрешность. Кроме того, введение дополнительного блока определения разности периодов поз воляет по знаку и величине разности дву периодов, в течение каждого из которых фаза процесса движения изменяется на 6 дин и тот же угловой интервал, судить и только о скорости в данный момент, о и том, на СКОЛЬКО и в какую сторону изменяется данная скорость. 3}1ание такого фактора позволяет точно предсказать корость в пусковой момент путем коррекции скорости, измеренной в интервале и выдать пусковой импульс в нужный момен т. Кроме повышения точности измерения добились и другого эффекта, так как уже нет необходимости иметь большое число угловых меток системы привязки. Теперь достаточно привязаться к любому вращающемуся элементу с небольшим числом меток, например к шестерне коробки перемены передач, звездочке распределительного, вала и т.д.,т.е. в целом упрощается требование к системе привязки. На фиг. 1 представлена структурная схема предлагаемого устройства на фиг. 2- диаграмма, поясняющая принцип работы устройства. Устройство содержит датчик 1 нячальной установки, выход которого соединен с первыми входами блока 2 управления и блока 3 счетчиков импульсов, третьим входом преобразователя 4 масштаба, вто рыми входами блока 5 определения разности периодов и блока 6 накопления и считывания, а также со входом генератора 7 временного интервала, выход которого подключен к первым входам блока 5 определения разности периодов и блока 8 определения остатка и целых периодов, второй вход Которого соединен с выходом датчика 9 импульсов фазы движения, который так же соединен и со вторым входом блока 2 управления. Первый выход блока 8 определения остатка и целых периодов подключен к первому входу блока 6 накопления и считывания, а второй выход соединен с третьим входом блока 2 управлениями первым входом преобразователя 4 масштаба, второй вход которого подключен к выходу блока 2 управления. Второй выход преобразователя 4 масштаба соединен со вторым входом блока 3 счетчиков импульсов, при этом первые выходы преобразователя 4 масштаба и блока 3 счетчиков импульсов подключены к соответствующим входам блока 5 определения разности периодов, выходы которого соединены с третьим и четвертым входами блока 6 накопления и считывания, пятый вход которого соединен со вторым выходом блока 3 счетчиков импульсов. 58 Выход же блока 6 накопления и считывания является выходом устройства. Устройство работает следующим обра зом. Датчик 9 импульсов фазы движения в .процессе периодического процесса движе-ния выдает стандартные по амплитуде и длительности импульсы (фиг. 2), частота котооых пропорциональна скорости враще ния. Датчик 1 начальной установки такж выдает импульсы, частота которых пропорциональна скорости, однако он используется в качестве отсчетной точки по фазе и за период .процесса движения появляется один только раз. В качестве от счетной точки может служить любая метка, установленная, например, у ДВС как в верхней мертвой точке, так и в любом положении относительно нее, на которую реагирует датчик 1 начальной установки. По импульсу с выхода датчика I начальной установки все блоки, связанные с ни устанавливаются в исход11ре состояние. Одновременно запускается генератор. 7 временного интервала, который выдает интервал времени S (фиг. 26). Вначале рассмотрим работу устройств когда процесс движения изменяется медленно и 6 равно 5, т.е. П равно 1, при этом интервал времени S равен интервалу времени, как и в известном. По управляю щему сигналу, поступающему с выхода генератора 7 временного интервала на третий вход блока 2 управления, импульсы датчиков 9 импульсов фазы движения проходят через блок 2 управления на вто рой вход преобразователя 4 масштаба, в котором в зависимости от временного интервала устанавливается коэффициент ум.ножения, равный значению h , причем 1N , где N -число импуль DVCKпуск сов пусковой серии. Коэффициент п в преобразователе 4 масштаба устанавливается только за интервал времени Sпо сигналу, поступающему на первый вход преобразователя 4 масштаба, а вне интервала времени коэф фициент умножения всегда равен 1. Поскольку в нашем случае п I, то в любое время коэффициент умножения всегда равен 1, так что импульсы датчика 9 импульсов фазы движения, не прете певая изменения в преобразователе 4 ма штаба, проходят на блок 3 счетчиков импульсов NE -, (фиг. 2 в). Из диаграммы 2 в также видно, что в интервал вписывалось некратное число периодов, т.е. остатком периодов Л , которую надо было учесть в ггусковой серии. Однако 0 нацо было бы в пусковой серии гфи достижении ,1,.+ пуск определенного знччения N к ДТ добавить такие значения другого остатка, при котором их сумма равнялась бы одному целому периоду, что очень сложно. Из фиг. 2 в вицно, что этим остатком является At , поэтоКГу есть смысл заПомнить это значение остатка, которое всегда равно интервалу времени от конца интервала. S до начала очередного импульса датчика 9 фазы движения. Значение At выделяется в блоке 8 определения остатка периода и целых периодов и подается на первый вход блока 6 накопления и считывания. За промежуток времени ЛЬ происходит накопление импульсов- генератора постоянной частоты (фиг. 2 г), количество которых пропорционально значению At. . При достижении начала пусковой силы импульсы датчика 9 импульсов фазы движения с выхода блока 2 управления через преобразователь 4 масштаба поступают на вход блока 3 момент счетчика импульсов, при этом в bj, достижение суммы Мбаз сч. в нашем случае (фиг. 2 б), блок 3 счетчиков импульсов со второго выхода выдает управляющий сигнал на второй вход блока 6 накопления и считывания. При этом ранее накопленные импульсы за интервал At. считываются с той же частотой до О (фиг. 2 г), в момент которого выдается пусковой импульс. Следует сказать, что интервал времени с момента считывания Ъ до момента выдачи пускового импульса tjj равен интервалу времени от конца интервала 5до начала ближайшего импульса, т.е. it, который в пределе может быть равен одному периоду. Таким образом, точность получения пусковых импульсов теперь не зависит от дискретности зубьев, а зависит в конечном счете только от частоты внешнего генератора. Рассмотрим работу устройства, когда процесс меняетг я быстро, например изменение периода вращения вала двигателя в режиме разгона, торможения или выбега, когда внутри оцного оборота скорость вращения меняется до ЗО% и выше. В этом случае известное устройство будет работать с большими погрешностями. В предлагаемом устройстве для уменьшения указа1гаой погрешности блок 5 определения разности периодов по сигиа.пам с первых выходов блока 3 счетчиков и преобразователя 4 масштаба определяет знак и величину разности двух периоцов времеи ATj (фиг. 2 в), в течение каж до го из которых фаза процесса движения изменяется на один и тот же угловой интервал. При этом выбор ДТ и ATgno фазе может быть самым разнообразным, однако, .как показывает опыт, достаточно Л-Т брать средним периодом за интервал S . а ATg за один период до начала считывания. Кроме того, в зависимости от скорое . ти и характера процесса движения эти интервалы могут состоять из нескольких импульсов датчика 9 импульсов фазы движения. При работе устройства с учетом динамики алгоритм работы меняется незначительно, при этом к остатку периода Д. добавляют следующий за ним один период ATj, (или несколько периодов), а начало считывания соответственно смещается так же на один (или несколько) периодов (фи 2 д) от момента tjiK моменту 1 (фцг. 2в Аналогично, с выхода блока 8 определения остатка и целых периодов по дается на первый вход блока 6 накопле. ния и считывания, в котором точно так же накапливают импульсы за время At + Ч-ДТ,- (фиг. 2 д). К моменту.окончания uTj блок 5 определения разности периодов выдает интервал времени «.Т ЛТ - ДТ и информацию о знаке разности на третий и четвертый выходы блока 6 накопления и считывания в котором за интервал времени ДТ накапливаются и считываются к ранее уже накопленным импульсам за время ДЬ+ЛТ} На фиг. 2 д показаны графики: сплошными линиями - для стационарных процес сов движения, штрихпунктирными линиями в режиме торможения, пунктирными линия ми - в разгона. Таким образом, в режиме разгона скорость в пусковой момент будет больше в момент измерения скорости внутчемри интервала 5 , поэтому идет поправка в моменте выдачи пускового импульса на величину ДТ- k в сторону опережения, а в режиме выбега или торможения наоборот. Работа устройства в случае, когда S (фиг. 2 е), происходит аналогичны образом с той лишь разницей, что начало фазы S сдвигают ближе к пусковой сери в два раза, а при накоплении импульсов серии М§о,а (фиг. 2 ж) в преобразователе 4 масштаба в течение интервала ставится коэффициент умножения, ра ный 2, а на выходе его получается число импульсов, равное произведению Nggbl (на диаграмме не показано), т.е. равно 6. С момента начала пусковой серии к произведению добавляют . (фиг. 2 ж), и в момент равенства значению N 9 выдается сигнал на считываний остатка периода &t, причем при й 3/й в блоке 6 накопления скорость считывания меньше,чем скорость накопления за At в 2 раза (фиг. 2 и ). Уменьшение ё в два раза не повлекло за собой изменения алгоритма работы в целом, и пусковой импульс получается в тот же момент, что и первом случае. Аналогичным образом 5 можно уменьшить в три, четыре раза и так далее, установив соответствующий коэффициент в преобразователе 4 масштаба и соответствующий коэффициент накопления и считывания в блоке 6 накопления и считывания. Введение в известное устройство блока определения разности периодов, блока определения и остатка и целых периодов, преобразователя масштаба и блока считывания и накопления позволяет существенно повысить точность пусковых импульсов, например, для двигателей семейства ВАЗ дискретность зуба составляет: 2,8 или +1,4 . Угол опережения в диапазоне 1000-4ООО об/мин меняется в пределах 5-35Ч Таким образом, дискретность зуба дает погрешность от 4 до 30%. Предлагаемое устройство позволяет полностью устранить эту погрешность, С другой стороны рассмотрим динами ческую ошибку известного способа, например, в режиме разгона двигателей семейства ВАЗ. Время разгона от.бОО об/мин до 6ООО об/мин составляет I с. При этом за один оборот скорость меняетсяот 774 об/мин до об/мин, т.е. скорость в конце периода по отношению к скорости в начале периода составляет 30%. Реально информацию о скорости полу- чают примерно за ВТМ. А пусковой импульс на низких оборотах (774 об/мин) должен появиться примерно за ВТМ. Таким образом, ошибка в скорости за бо до ВТМ по отношению к скорости за 5% ВТМ равна 5% Предлагаемое устройство позволяет эту погрешность свести к нулю. Таким образом, за счет точного чения пvcкoвыx импульсов существенно увеличиввется мощность, приемистость двигателя, а также уменыпается расход топлива.
-9 Формула изобрегени
Устройство для получения пускового и пуяьса, содержащее датчик импульсов фазы движения, датчик начальной установки, генератор времегшого интервала, блок счетчиков импульсов, блок управления, пр этом выход датчика начальной установки подключен ко входу генератора временног интервала и к первым входам блока счетчиков импульсов и блока управления, вто рой вход которого соединен с выходом датчика импульсов фазы движения, отличающееся тем, что, с целью повышения точности получения пусковых импульсов, введены преобразователь масщтаба, блок определения разности периодов, блок определения остатка и целых периодов, блок накопления и считывания, ппи этом выход генератора временного интервала подключен к первым входам блока определения разности периодов и блока определения остатка и целых периодов, второй вход которого соединен с выходом датчика импульсов фазы движения j причем первый выход блока определения остатка и целых периодов подключен к первому входу блока накопления и считы8O9S3O
10
вания, а второй выход соединен с третьим входом блока управления и первым входом преофазователя масштаба, второй вход которого подключен к выходу блока управления, при этом третий вход преобразователя масштаба, вторые входы блока определения разности периодов и блока накопления и считывания соединены с выходом датчика начальной установки, кроме того,
первые вькоаы преобразователя масштаба и блока счетчиков импульсов подключены к соответствующим входам блока определения разности периодов, первый и второй выходы которого соединены с третьим и
четвертым входами блока накопления и считывания, пятый вход которого соединен со вторым выходом блока счетчиков импульсов, кроме того, второй выход пре образователя масштаба подключен ко вто
рому входу блока счетчиков импульсов, а вькод блока накопления и считывания является выходом устройства.
Источники информации, принятые во внимание при экспертизе
1. Труды НИИ А в то приборов. М., 1972, №26, с. 32.
2. Патент ФРГ NJ 2О 1О999, кп. 15 О2 Р З/ОО, опублик. 1974.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для получения пусковыхиМпульСОВ | 1978 |
|
SU809529A1 |
| Способ получения пусковых импуль-COB для СиСТЕМы зАжигАНия дВигАТЕ-лЕй ВНуТРЕННЕгО СгОРАНия | 1977 |
|
SU808683A1 |
| Способ получения пусковых импульсовдля СиСТЕМ зАжигАНия | 1977 |
|
SU808682A1 |
| Устройство для измерения мощности | 1979 |
|
SU977963A2 |
| Устройство для получения пусковогоиМпульСА | 1977 |
|
SU808681A1 |
| Способ фазового управления асинхронным электродвигателем и устройство для его осуществления | 1978 |
|
SU928582A1 |
| Преобразователь цифрового кода в частоту следования импульсов | 1976 |
|
SU738158A1 |
| Цифровой измеритель скоростей | 1979 |
|
SU845100A1 |
| Система числового программного управления | 1986 |
|
SU1386963A1 |
| Электропривод постоянного тока | 1987 |
|
SU1515311A1 |