(54) ОБРАТИМАЯ СЛЕДЯЩАЯ СИСТЕМА
| название | год | авторы | номер документа |
|---|---|---|---|
| Обратимая следящая система | 1980 |
|
SU954920A1 |
| Следящая система | 1979 |
|
SU847275A1 |
| Следящая система | 1986 |
|
SU1352451A1 |
| Бесконтактный регулируемый электропривод | 1990 |
|
SU1830598A1 |
| Датчик стыка для плавящегося электрода | 1987 |
|
SU1484526A1 |
| Следящая система автоматического направления электрода по стыку свариваемых деталей | 1981 |
|
SU998042A1 |
| Импульсный источник питания | 1981 |
|
SU1019597A1 |
| ИЗМЕРИТЕЛЬ ВЛАЖНОСТИ ЗЕРНА | 1992 |
|
RU2034288C1 |
| Устройство для экстренной разгрузки линии электропередачи при аварийном снижении предела передаваемой мощности | 1982 |
|
SU1083286A1 |
| Устройство для измерения износа ударовоспринимающего датчика | 1980 |
|
SU919742A1 |
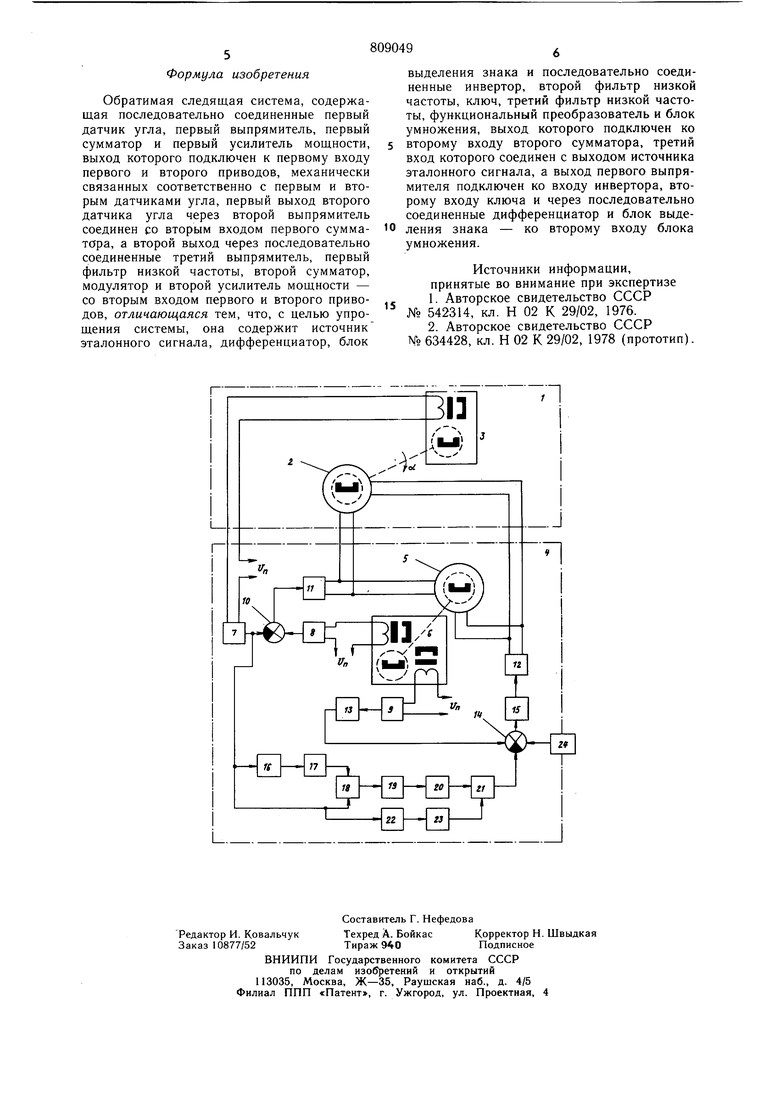
Изобретение относится к автоматике и вычислительной технике и может быть использовано при создании систем управления очувствленным дистанционным конирующим манипулятором. Известна обратимая следящая система, содержащая датчик угла задающего органа, привод и датчик угла исполнительного органа и управляющий коммутатор 1. Однако эта система не обеспечивает отражения на руку оператора момента нагрузки, приложенного к исполнительному органу, Наиболее близким техническим решением к данному изобретению является система, содержащая последовательно соединенные первый датчик угла, первый выпрямитель, первый сумматор и первый усилитель мощности, выход которого подключен к первому входу первого и второго приводов, механически связанных соответственно с первым и вторым датчиками угла, первый выход второго датчика угла через второй выпрямитель соединен со вторым входом первого сумматора, а второй выход через последовательно соединенные третий выпрямитель, первый, фильтр низкой частоты, второй сумматор, модулятор и второй усилитель мощности - со вторым входом первого и второго приводов 2. Недостаток этой системы - большое число электрических соединений между задающим и исполнительным органами, что при значительном их удалении приводит к усложнению системы и снижению ее надежности. Цель изобретения - упрощение и повышение надежности системы. Цель достигается тем, что система дополнительно содержит источник эталонного сигнала, дифференциатор, блок выделения знака и последовательно соединенные инвертор, второй фильтр низкой частоты, ключ, третий фильтр низкой частоты, функциональный преобразователь и блок умножения, выход которого подключен ко второму входу второго сумматора, третий вход которого соединен с выходом источника эталонного сигнала, а выход первого выпрямителя подключен ко входу инвертора, второму входу ключа и через последовательно соединенные дифференциатор и блок выделения знака - ко второму входу блока умножения. На чертеже представлена функциональная схема системы. Обратимая следяшая система содержит исполнительный орган I, первый привод 2, первый датчик 3 угла, задающий орган 4, второй привод 5, второй датчик 6 угла, первый, второй и третий выпрямители 7 - 9 соответственно, первый сумматор 10, первый и второй усилители 11 и 12 мощности соответственно, первый фильтр 13 низкой частоты, второй сумматор 14, широтно-импульсный модулятор 15, инвертор 16, второй фильтр 17 низкой частоты, ключ 18, третий фильтр 19 низкой частоты, функциональный преобразователь 20, блок 21 умножения, дифференциатор 22, блок 23 выделения знака, источник 24 эталонного сигнала, опорное напряжениеОв. Система работает следующим образом. При движении системы среднее значение импульсного напряжения, снимаемого с выхода первого датчика 3 угла, на выходе первого выпрямителя 7 изменяется по закону Un, 0,5А(1 + со5а„) где А - амплитуда импульсов питающего напряжения прямоугольной формы; Х- - угол поворота ротора первого датчика 3 угла. Среднее значение импульсного напряжения, снимаемого с выходов второго датчика 6 угла, на выходах второго 8 и третьего 9 выпрямителей изменяется по законам 2/, 0,5А(1 + cos.ij) и Z/JJ 0,5АА(1 + + ) где glj - угол поворота ротора второго датчика угла 6. Импульсное напряжение с выхода первого выпрямителя 7 подается на вход инвертора 16, на выходе которого среднее значение импульсного напряжения изменяется по закону , 0,5A(l-cosrfy,), которое через второй фильтр 17 низких частот подается на.ключ 18, на управляющий вход которого подается импульсное напряжение непосредственно с выхода первого выпрямителя 7, так что на выходе ключа 18 среднее значение импульсного напряжения изменяется по закону Ui,, lIti,Un, 0,25A2sine(., которое через третий фильтр 19 низких частот подается на функциональный преобразователь 20 с характеристикой квадратного корня, на выходе которого напряжение равно WA 0,5Asinit,. Это напряжение в блоке 21 умножения умножается на ± 1 в зависимости от знака производной от сигналами,, которая с выхода дифференциатора 22 через блок 23 выделения знака подается на блок 21 умножения, так что на его выходе напряжение равно . 0,5 А sinrf. При согласованном положении валов, когда itj rfj (С сигналы на выходах первого 7 и второго 8 выпрямителей соответственно равны Lin.i 0,5 А (1 + cosil) iitlyf 0,5А (1 + cos). Так как эти сигналы равны, то на выходе первого сумматора 10, а следовательно, и на первых входах первого 2 и второго 5 приводов, параллельно подключенных к первому усилителю мощности 11, напряжение отсутствует. На выходе третьего выпрямителя 9 сигнал равен J/« 0,5А(1 + sinit) который через первый фильтр низкой 13 частоты подается на второй сумматор 14, куда подается опорное напряжение/, величина которого равна амплитуде импульсов иц,питающ о напряжения прямоугольной формы, т. е.Лв А, и с блока 21 умножения сигнал Ияг 0,5AsineC, поэтому на выходе второго сумматора 14, а следовательно и на выходе щиротно-импульсного модулятора 15 и на вторых входах первого 2 и второго 5 приводов, параллельно подключенных ко второму усилителю 12 мощности, напряжение отсутствует. Если ротор второго привода повернут на некоторый угол Л относительно ротора первого датчика 3 угла, то на выходе первого 7 и второго 8 выпрямителей сигналы станут равны UM, 0,5А(1 + cosu) и Uai 0,5Afl + -i- cos (ОС + A)j, так что напряжение на выходе первого сумматора 10 будет равно «я, 1/Ь -Уя, - А sinfsin ( + f), которое через первый усилитель 11 мощности подается на первые входы первого 2 и второго 5 приводов, а на выходе третьего выпрямителя 9 сигнал будет равен ЗХ + sin(et + Д), который через первый фильтр 13 низких частот подается на первый вход второго сумматора 14, на второй вход которого с выхода блока 21 ,. умнож ения подается напряжение 26 0,5Asina, так что на выходе второго сумматора 14 напряжение равно 2/4 « -Наг-Уо Asin|-cos(et + f) и через щиротно-импульсныи модулятор 15 и второй усилитель 12 мощности подается на вторые входы первого 2 и второго 5 приводов. Так как на входах первого привода 2 появилось напряжение, то ее ротор и соединенный с ним ротор первого датчика 3 угла начинают вращаться в сторону уменьщения угла рассогласования А и вращаются до тех пор, пока момент, развиваемый первым приводом 2, не станет равен моменту нагрузки на валу этой мащины. В связи с тем. что напряжения, подаваемые на входы первого привода 2, при этом подаются и на соответствующие входы второго привода 8, то развиваемый им момент будет равен моменту, развиваемую первым приводом 2, который и будет ощущать оператор. Применение изобретения позволит значит льно сократить число связей между задающим и исполнительным органами дистанционного манипулятора.
Формула изобретения
Обратимая следящая система, содержащая последовательно соединенные первый датчик угла, первый выпрямитель, первый сумматор и первый усилитель мощности, выход которого подключен к первому входу первого и второго приводов, механически связанных соответственно с первым и вторым датчиками угла, первый выход второго датчика угла через второй выпрямитель соединен со вторым входом первого сумматора, а второй выход через последовательно соединенные третий выпрямитель, первый фильтр низкой частоты, второй сумматор, модулятор и второй усилитель мощности - со вторым входом первого и второго приводов, отличающаяся тем, что, с целью упрощения системы, она содержит источник эталонного сигнала, дифференциатор, блок
L
выделения знака и последовательно соединенные инвертор, второй фильтр низкой частоты, ключ, третий фильтр низкой частоты, функциональный преобразователь и блок умножения, выход которого подключен ко
второму входу второго сумматора, третий вход которого соединен с выходом источника эталонного сигнала, а выход первого выпрямителя подключен ко входу инвертора, второму входу ключа и через последовательно соединенные дифференциатор и блок выделения знака - ко второму входу блока умножения.
Источники информации, принятые во внимание при экспертизе
NO 634428, кл. Н 02 К 29/02, 1978 (прототип).
