Изобретение относится к электротехнике, в частности, к электроприводу с регулированием частоты вращения и реверса и может найти применение в следящих системах антенн, содержащих вентильные электродвигатели.
Целью изобретения является повышение точности и качества регулирования при малых сигналах задатчика частоты вращения.
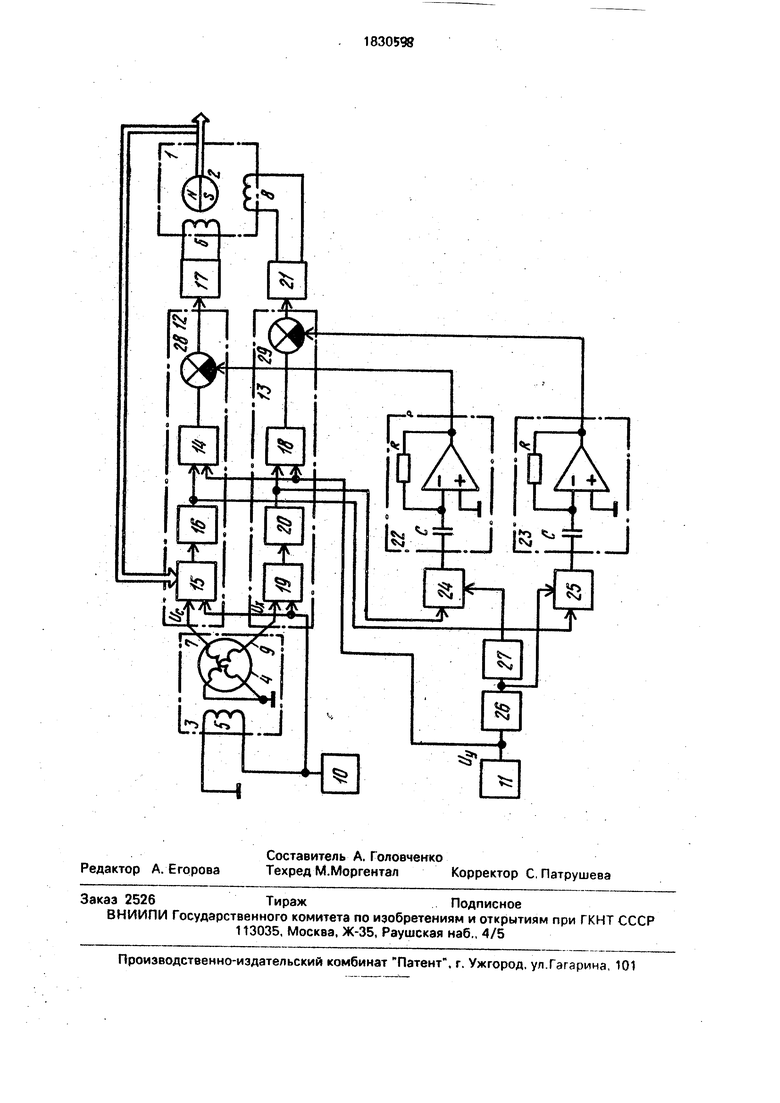
На чертеже представлена схема бесконтактного регулируемого электропривода.
Бесконтактный регулируемый электропривод содержит двухфазный синхронный электродвигатель 1 с ротором 2 и датчиком 3 положения ротора в виде вращающегося трансформатора с ротором 4 и первичной обмоткой 5, имеющие соответственно синусные 6, 7 и косинусные 8, 9 якорные обмотки. Электропривод содержит источник 10 сигнала, задатчик 11 частоты вращения, два канала 12, 13 управления, один из которых содержит блок 14 умножения, фазочув- ствительный выпрямитель 15 фильтр 1-6 и усилитель 17, а другой канал управления блок 18 умножения, фазочувствительный выпрямитель 19, фильтр 20 и усилитель 21. Выходы усилителей 17, 21 подключены к якорным обмоткам 6, 8 синхронного электродвигателя. Схема выделения частоты вращения электропривода содержит дифференциаторы 22, 23, управляемые инверторы 24, 25, компаратор 26 знака сигнала управления и логический инвертор 27.
Выход источника 10 сигнала подсоединен к первым входам фазочувствительных выпрямителей 15, 19 и к первичной обмотке 5 вращающегося трансформатора 3. синусная 7 и косинусная 9 обмотки которого соот- ветственно через вторые входы фазочувствительных выпрямителей 15, 19, фильтры 16, 20, блоки 14, 18 умножения, усилители 17, 21 связаны с синусной 6 и косинусной 8 якорными обмотками двухфазного синхронного электродвигателя 1, ротор 2 которого механически связан с ротором 4 датчика 3 положения ротора. Вход дифференциатора 22 через управляемый инвертор 42 соединен с выходом фильтра 20, а входдифференцизтора 23 через второй
сл
с
со ы
О
сл о
00
управляемый инвертор 25 - с выходом фильтра 16. Выходы дифференциаторов 22, 23 соединены соответственно со вторыми входами элементов сравнения 28,29,выходами соединенными с суммирующими усилителями 17, 21. Задатчик 11 частоты вращения подсоединен ко вторым входам блоков 14, 18 умножения. Управляемые входы управляемых инверторов 24, 25 соединены соответственно с выходом логического инвертора 27 и выходом компаратора 26, вход которого соединен с задатчиком 11 частоты вращения, а выход - со входом логического инвертора 27.
Электропривод работает следующим образом.
Источник 10 сигнала генерирует сигнал Ur переменного тока с угловой частотой со и постоянной амплитудой U, равный Ur Usin ftrt. который поступает на первичную обмотку 5 вращающегося трансформатора 3 и одновременно подается на вторые входы фазо- чувствительных выпрямителей 15, 19, выполненных, например, на перемножителях аналоговых сигналов. На синусной 7 и косинусной 9 обмотках вращающегося трансформатора 3 образуются напряжения переменного тока с амплитудами, из- меняющимися по синусному и косинусному законам от угла поворота ротора электродвигателя, равными:
U U n sin рв sin on; U9 U n cos рв sin wt,
где #-угол поворота ротора 2 электродвигателя 1;
n - коэффициент трансформации вращающегося трансформатора 3;
р - число пар полюсов электродвигателя 1 и вращающегося трансформатора 3.
После перемножения сигналов источни ка 10 и синусной U и косинусной Ug обмоток и фильтрации на выходах первого 16 и второго 20 фильтров сигналы определяются выражениями:
1
Uie 2 2 n sln р 0 U2o Uancos р 0j
(1)
При вращении ротора 2 электродвигателя 1 с угловой частотой угол в изменяется во времени # Qt(2)..
Запишем выражение (1) с учетом выражения (2):
Ui6 U2nsinp Qt
20 Ту U2 П COS р Qt
Для управления электродвигателем 1 по скорости и направлению вращения эти сигналы перемножаются в первом 14 и втором 18 блоках умножения с сигналом управления Uy, поступающим с задатчиком 13 частоты вращения в виде напряжения постоянного тока заданного уровня и знака полярности,
В результате перемножения на выходе блоков 14, 18 умножения напряжения определяются выражениями:
Ui4 -UyU2ns n pQt
25
Ui2 j Uy U2 n cos p Qt
На суммирующих входах суммирующих усилителей 17, 21 из этих напряжений вычитаются напряжения обратной связи U22 и U23, сформированные дифференциаторами 22, 23 в сочетании с управляемыми инверторами 24, 25, компаратором 26 знака сигнала управления и логическим инвертором 27 из сигналов Uie и U20, поступающих с фильтров 16 и 20.
Напряжения на выходах дифференциаторов 22, 23 при соответствующем знаке полярности сигнала управления определяются выражениями:
45
U22 jpQRCU2nslnpQt; U23 pQRCU2ncospQt
Как видно, амплитуды этих сигналов линейно зависят от угловой частоты Q вращения ротора 2 электродвигателя 1, что и требуется от сигналов обратной связи по скорости.
На выходах первого 17 и второго 21 суммирующих усилителей сигналы, которые подаются на якорные обмотки 6 и 8 электродвигателя 1, определяются выражениями:
Ui K(Un - U22) 1/2 KU2 л (Uy 

| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод переменного тока | 1989 |
|
SU1757041A1 |
| Вентильный электродвигатель | 1989 |
|
SU1767638A1 |
| Реверсивный вентильный электропривод | 1985 |
|
SU1279040A1 |
| Бесконтактный регулируемый электропривод | 1986 |
|
SU1361697A1 |
| Моментный вентильный электропривод | 1985 |
|
SU1310962A1 |
| Бесконтактный регулируемый электропривод | 1982 |
|
SU1075344A1 |
| Способ управления вентильным электродвигателем и устройство для его осуществления | 1990 |
|
SU1823082A1 |
| Электропривод | 1979 |
|
SU864476A1 |
| Реверсивный вентильный электродвигатель | 1983 |
|
SU1132329A1 |
| Цифроаналоговая следящая система | 1988 |
|
SU1580554A1 |
Использование: в следящих системах антенны. Сущность: в бесконтактном регулируемом электроприводе схема выделения частоты вращения снабжена управляемыми инверторами, компаратором знака полярности и инвертором. Выходы дифференциаторов соединены с вторыми входами элементов сравнения, включенными между блоками умножения и усилителями. Что позволяет снизить дрейф нуля и температурные погрешности. 1 ил.
-pQRC)sln pQt
U21 K(Uie - U23) - 7f KU2 n (Uy -pQRCJcos p Qt
где К - коэффициент усиления суммирующих усилителей.
Амплитуды этих сигналов зависят от управляющего сигнала Uy задатчика 11 частоты вращения и угловой частоты Q вращения ротора 2 электродвигателя 1. Этим обеспечивается управление скорости вращения ротора 2 электродвигателя 1 в электроприводе, охваченном обратной связью по частоте вращения ротора 2.
Таким образом, схема бесконтактного регулируемого электропривода позволяет обеспечить введение отрицательной обратной связи по скорости вращения ротора электродвигателя при использовании информации от датчика положения ротора, что, в свою очередь, позволяет отказаться от использования тахогенератора, выполненного в виде двухфазного синхронного генератора, и связанных с ним элементов схемы и тем самым упростить конструкцию электропривода при одновременном снижении его стоимости.
Формула изобретения
Бесконтактный регулируемый электропривод, содержащий двухфазный синхронный электродвигатель, синусно-косинусный датчик положения ротора, установленный
на валу указанного электродвигателя, два канала управления, каждый из которых содержит блок умножения и усилитель, выходом подключенный к одной из якорных
обмоток синхронного электродвигателя, первые входы блоков умножения объединены, схему выделения частоты вращения, снабженную двумя дифференциаторами, эадатчик частоты вращения и два элемента
сравнения, отличающийся тем, что, с целью повышения точности и качества регулирования при малых сигналах задатчика частоты вращения, схема выделения частоты вращения снабжена двумя упрэвляемыми инверторами, выходами соединенными с входами дифференциаторов, силовыми входами - с выходами синусно-косинусного датчика положения ротора, последовательно соединенными компаратором знака полярности и инвертором, выход которого подключен к управляющему входу одного управляемого инвертора, управляющий вход другого управляемого инвертора подключен к выходу компаратора знака полярности, входом соединенного с выходом задатчика частоты вращения, подключенным к объединенным первым входам блоков умножения каналов управления, выходы которых соединены с первыми входами элементов сравнения, вторые входы которых подключены к выходам дифференциаторов соответственно, а выходы элементов сравнения подключены к входам соответствующих усилителей каналов управления.
| Вентильный электропривод | 1986 |
|
SU1390765A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Реверсивный вентильный электродвигатель | 1987 |
|
SU1431015A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Механическая топочная решетка с наклонными частью подвижными, частью неподвижными колосниковыми элементами | 1917 |
|
SU1988A1 |
